基于S3C44B0X芯片的单回路PID控制器参数整定
2011-05-21 00:41王冬梅胡春万孙富振
电子设计工程 2011年12期
刘 迪,王冬梅,胡春万,孙富振
(1.海军航空工程学院 控制工程系,山东 烟台 264001;2.92635部队 山东 青岛 266041)
在现代工业控制应用中,单回路控制系统是最简单、最基本、也是使用最广泛的一种形式。对于控制系统来说,在设定值发生变化或系统受到扰动作用后,系统将从原来的稳态经历一个过程进入另一个新的稳态。一个自动控制系统的好坏在稳态下是难以判别的,只有在过渡过程中才充分反映出来。一个良好的控制系统,在经历扰动后,一般应平稳、迅速和准确地趋近或回复到设定值。这就需要对调节器的控制参数进行准确地设定才能达到理想的效果。采用传统的以8位芯片为核心的控制器已在很多领域的应用上受到了限制,新一代的32位嵌入式芯片正在被越来越广泛的应用,ARM7TDMI32位嵌入式芯片正是其中的一种。在其基础之上配合高性能的软件体系,就有可能得到稳定性更强、适应性更强、功能更丰富的控制器[1]。本控制器正是以S3C44B0X芯片为核心设计的单回路控制器。
1 ARM7TDMI32体系结构
目前比较有影响力的32位嵌入式处理器有6~7种,而ARM处理器具有高性能、低功耗和低成本等显著优点,已成为高性能、低功耗嵌入式微处理器的代名词,是目前32位、64位嵌入式处理器中应用最广泛的一个系列。当前,ARM处理器得到了众多半导体厂家和整机厂商的大力支持,全球已有100多家IT公司在采用ARM技术。ARM公司既不生产芯片,也不销售芯片,而是设计出高效的IP内核,授权于各半导体公司使用,半导体公司在ARM技术的基础之上,根据自己公司的产品定位,添加自己的设计并推出芯片产品,最后由OEM客户采用这些芯片来构建基于ARM技术的最终应用产品。经过10多年的发展,ARM公司已是业界领先的IP供应商。优良的性能和准确的市场定位极大地丰富了ARM资源,加速了基于ARM核的面向各种应用系统芯片的开发应用,使得ARM获得了更广泛的应用,确立了ARM技术的市场领先地位。ARM在高性能嵌入式应用领域获得了巨大的成功,已在32位嵌入式应用中稳居世界第一。
由于网络与通信技术的发展,嵌入式系统在经历了近 20年的发展历程后,又进入了一个新的历史发展阶段,从普遍的低端应用到高、低端并行发展,并且不断提升低端应用技术水平。原来由于传统电子系统智能化对 8位机的需求,形成了32位机的发展迟迟不前的局面。当网络、通信和多媒体信息家电业兴起后,出现了嵌入式系统高端应用的市场;而在嵌入式系统的高端应用中,嵌入式微处理器以其明显的性能优势迅速形成 32位机高端应用的主流地位。网络、通信、多媒体和信息家电时代的到来,无疑为32位嵌入式系统高端应用提供了空前巨大的发展空间;同时,也为力不从心的8位机向高端发展起到了接力作用。控制系统的网络化、智能化的发展趋势,要求在这些 8位机的应用中,提升海量数据处理能力。当 8位机无法满足这些提升要求时,便会转而求助 32位机的解决办法。因此,32位机的市场需求发展由 2方面所致:1)是高端新兴领域(网络、通信、多媒体和信息家电)的拓展;2)是低端控制领域应用在数据处理能力的提升要求。 后PC时代的到来以及 32位嵌入式系统的高端应用,吸引了大量计算机专业人士的介入;加之嵌入式系统软、硬件技术的发展,导致了嵌入式系统应用模式的巨大变化,即使嵌入式系统应用进入到一个基于软、硬件平台、集成开发环境的应用系统开发时代。
ARM7S3C44B0X处理器是ARM7处理器系列成员之一,是目前应用很广的32位高性能嵌入式RISC处理器。它使用3段流水线以提高处理器指令的流动速度。允许几个操作同时进行,并允许处理和存储系统连续操作。它是冯.诺依曼体系结构,使用单一32位数据总线传送指令和数据。只有加载、存储和交换指令可以访问存储器中的数据[2]。处理器存储器接口被设计成在使用存储器最少的情况下实现其潜能。关键的控制信号是流水作业的,以允许在标准低功耗逻辑下实现系统控制功能。这些控制信号方便了许多片内和片外存储器技术支持的快速突发访问模式的开发,方便了业界标准动态RAM提供的快速局部访问模式的利用。同时,嵌入式ICE-RT逻辑为ARM7S3C44B0X提供了集成的在片调试支持,可以使用嵌入式 ICE-RT逻辑来编程断点或观察点出现的条件[3]。此外,ARM7S3C44B0X处理器有高性能的32位ARM指令集和高代码密度的16位THUMB指令集2个指令集。处理器部件和主要信号路径如图1所示。
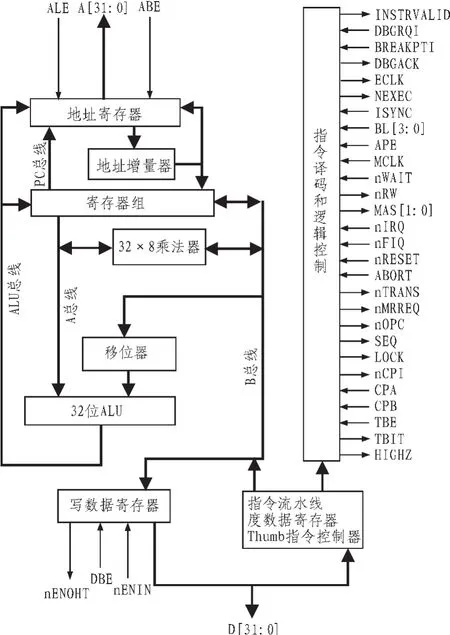
图1 ARM7处理器部件和主要信号路径的框图Fig.1 Block diagram of ARM7 processor components and the main signal path
2 单回路控制系统的具体设计
单回路控制系统由A/D转换器、D/A转换器、PID控制器、与外部被测对象、调节器组成单回路控制系统,系统的方框图如图2所示。本系统采用单回路的数字PID控制,主要将根据系统的给定值与实际值的偏差,利用ARM7S3C44B0X芯片进行PID运算后,来实现对PID控制参数的调整[4]。主调节器的输入由设定值与实际值的偏差给定,主调节的输出控制调节阀。调节器均具有常规调节器的功能,可单独地进行P、I、D 参数、给定值的设定。

图2 单回路PID控制系统框图Fig.2 Block diagram of single-loop PID control system
3 单回路控制器PID控制算法
比例积分微分控制,是过程控制中应用最广泛的一种控制规律。实际运行经验及理论分析充分证明,这种控制规律用于多数被控对象能够获得较满意的控制效果。因此,在计算机测控系统中广泛地采用PID控制规律。
PID算法的离散化对被控对象的静态和动态特性的研究表明,由于绝大多数系统中存在储能部件,使系统对外作用有一定的惯性,这种惯性可以用时间常数来表征。另外,在能量和信息传输时还会因管道、长线等原因引入一些时间上的滞后。在工业生产过程的实时控制中,总是会存在外界的干扰和系统中各种参数的变化,它们将会使系统性能变差。为了改善系统性能,提高调节品质,除了按偏差的比例调节以外,引入偏差的积分,以克服余差,提高精度,加强对系统参数变化的适应能力;引入偏差的微分来克服惯性滞后,提高抗干扰能力和系统的稳定性,由此构成的单参数PID控制回路

式(1)中 y(t)是被控变量,R 是 y(t)的设定值。 e(t)是调节器的输入偏差,后面将见到的u(t)是调节器输出的控制量,计算机测控系统通常利用采样方式实现对生产过程的各个回路进行巡回检测和控制,它属于采样调节。
设计中的单回路控制器采用的数字PID算法由软件实现,所谓PID控制就是按设定值与测量值之间偏差的比例、偏差的积累和偏差变化的趋势讲行控制。它根据采样时刻的偏差值计算控制量。因此PID控制律的实现,必须用数值逼近法[5]。当采样周期相当短时,可以用求和代替积分,用差商代替微分,即作如下近似变换:

式(2)中,k——采样序号,k=1,2…,T——采样周期。
显然,上述离散化过程中,采样时间必须足够短,才能保证有足够的精度。为了书写方便,将e(kT)简化表示成e(k)等,即省去T[6]。可以得到离散的PID表达式为:

式中,k——采样序号,k=0,1,2……;u(k)——第k次采样时刻的计算机输出值;e(k)——第k次采样时刻输入的偏差值;e(k-1)——第k-1次采样时刻输入的偏差值;KI——积分系数,微分系数,
该系统采用的是增量式PID控制算法,即指数字控制器输出只是控制量的增量Δu(k),该算法的优点是编程简单,数据可以递推使用,占用存储空间少,运算快[7]。
根据递推原理可得

用式(5)减式(6),可得增量式PID控制算法:

4 仿真说明

图3 单回路控制系统SIMULINK模型图Fig.3 Simulink model diagram of single-loop control system
该系统要做的仿真验证是:采用ARM7S3C44B0X芯片进行PID参数整定要比采用普通的89C51单片机芯片进行PID参数整定的效果好。在单回路控制系统的输入端输入一个阶跃信号,在示波器中得到的仿真图如图4、5所示。
图4为采用普通的89C51单片机芯片进行PID参数调试后的效果。

图4 采用普通的89C51单片机芯片进行PID参数调试后的仿真图Fig.4 Simulation charts of debugging PID parameters using ordinary 89C51 microcontroller chip
图5为采用ARM7S3C44B0X芯片进行PID参数调试后的效果。

图5 采用ARM7S3C44B0X芯片进行PID参数调试后的仿真图Fig.5 Simulation charts of debugging PID parameters using ARM7S3C44B0X chip
可以明显的看到,图4所示的仿真曲线,系统的动态偏差过大,稳定性不是很好。图5所示的仿真曲线,过渡过程非常平稳,超调量不大,曲线的波动不大,稳定性好。
5 结 论
单回路控制系统是最基本,结构最简单的一种控制系统。但它是生产过程中应用最为广泛的一种控制系统。因此,这种简捷方便的参数整定方法具有一定的实用性。本文采用ARM7S3C44B0X芯片进行单回路PID参数调试,与89C51单片机芯片相比较,体现出强大的数据处理功能,过渡过程非常平稳,在控制上达到了平稳、迅速、准确跟踪设定值的要求,控制效果良好。
[1]田洁.嵌入式系统的开发与应用[M].北京:北京航空航天大学出版社,2003.
[2]刘金馄.先进PID控制及MATLAB仿真[M].北京:电子工业出版社,2003:153-165.
[3]雷光辉 ,王炳谦 ,陈建国.热工自动控制系统实验装置[J].实验技术与管理 ,1998(6):35-37.LEI Guang-hui, WANG Bing-qian, CHEN Jian-guo.Thermal automatic control system for experimental devices[J].Experimental Technology and Management,1998 (6):35-37.
[4]瞿亮.基于M atlab的控制系统计算机仿真[M].北京:清华大学出版社,2006.
[5]赵丽艳 ,张袅娜.Matlab仿真技术在实验教学中的应用[J].职业技术教育,2006 (20):53-54.ZHAO Li-yan,ZHANG Xiao-na.The applications of matlab simulation technology in the experimentalteaching[J].Vocational and Technical Education,2006 (20):53-54.
[6]张俊宏.嵌入式系统原理与实务[M].北京:中国铁道出版社,2004.
[7]舒迪前.自适应控制[M].沈阳:东北大学出版社,1993:35-64.
猜你喜欢
湖北农机化(2021年7期)2021-12-07
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
自动化仪表(2015年5期)2015-06-15
电源技术(2015年9期)2015-06-05
汽车维修与保养(2015年6期)2015-04-17
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
质量技术监督研究(2015年1期)2015-04-09
单片机与嵌入式系统应用(2014年9期)2014-03-11