
三自由度混联机床的机构误差分析与仿真
2011-05-28 09:12李兴山蔡光起
组合机床与自动化加工技术 2011年3期
李兴山,蔡光起
(1.沈阳理工大学机械学院,沈阳 110168;2.东北大学机械工程与自动化学院,沈阳 110004)
0 引言
并联机床是基于空间并联机构的新型数控加工设备,具有刚度质量比大,承载能力大响应速度快,易于控制及可重组等优点,成为数控机床的发展趋势。但在工作空间数控轴数比、性能价格比等综合性能方面,并联机床有其不足之处。而并、串联同时采用的混联式数控机床结合了并联机构和传统机床的串联机构的优点,更具实用价值。而少自由度的混联数控机床更是以其机构简单,驱动容易,精度高等优点,成为国内外研究的新热点[1-4]。
并联机床的精度是并联机床能否投入工业运行的关键指标。目前,受制于动平台位姿信息的动态监测方法和手段的不足,因而无法实现全闭环控制。因此通过误差分析改善机床的精度就显得格外重要。通过误差分析,可以获得多个误差因素对机床总精度影响的程度,从而明确提高精度的重点和方向,为改善并联机床的设计品质提供准确可靠的依据。本文通过对东北大学三自由度混联机床机构误差的研究,采用矩阵分析的方法,建立了机构误差的数学模型,分析了驱动杆长度误差及铰链点误差的影响,并对其在工作空间内的分布情况进行了研究。
1 混联机床结构
混联机床的结构如图1所示,该机构由固定平台、运动平台、三杆平行机构,驱动杆及水平滑块等组成。运动平台与固定平台为三角形,两驱动杆通过虎克铰分别与固定平台及运动平台相连,由电机驱动的丝杠带动滑块水平移动。伺服电机驱动两 根驱动杆进行伸缩,通过改变各驱动杆的长度,可以调整运动平台的位置。三杆平行机构两端分别通过虎克铰与滑块及运动平台相连。整个机构通过调节驱动杆的长度和水平滑块的行程,带动运动平台在其工作空间内运动。由于三杆平行机构的存在,约束运动平台相对固定平台的转动。因此该机构具有三个平移自由度。
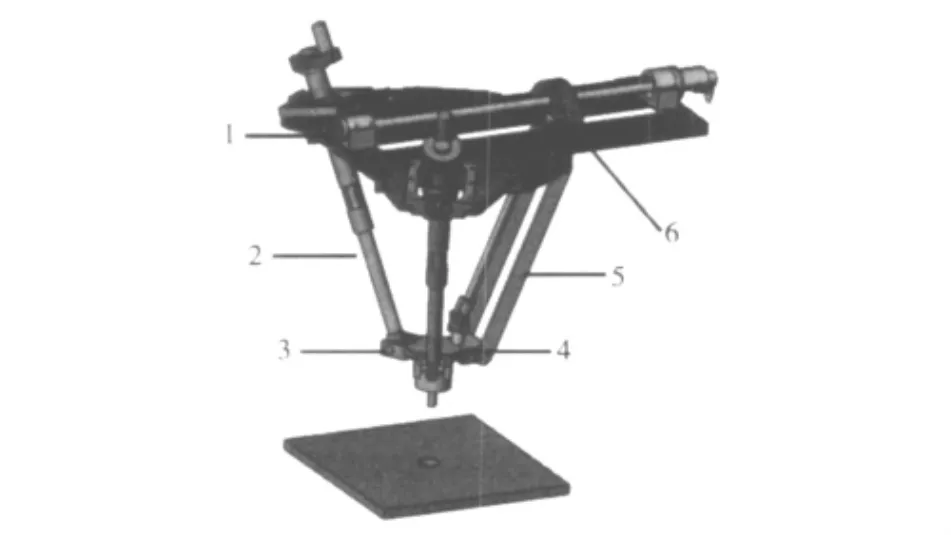
图1 混联机床三维实体模型
2 误差模型的建立
并联机床的精度是衡量并联机床工作性能和品质的重要指标之一,它是使并联机床达到运动的平稳性和控制的精确性的前提和基础。由于影响活动平台位置误差的因素是多样的,而且产生的误差是它们综合作用的结果,这些因素对活动平台的作用过程也是极其复杂的。所以,在研究本并联机构时,近似地认为每个因素对活动平台位置误差地影响具有相对的独立性[5]。由图2,可将对整个机构的研究简化为对四面体AA'EF的研究。
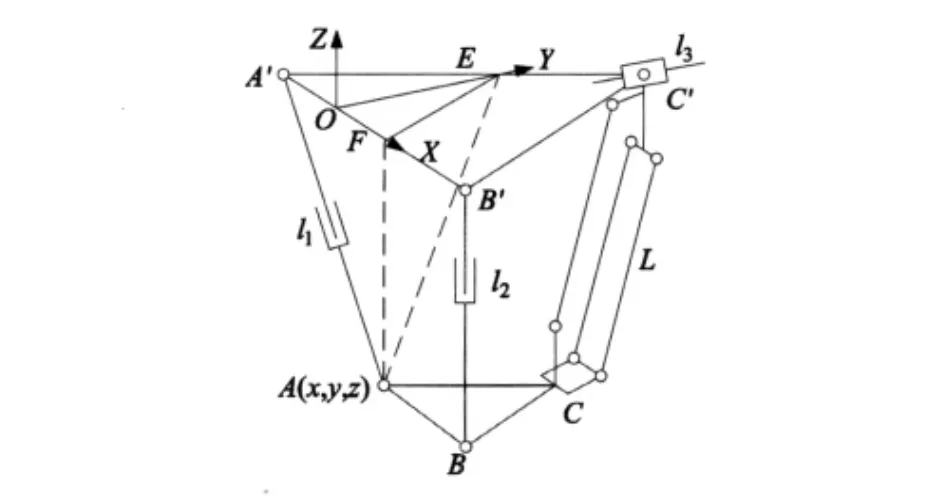
图2 混联机床的机构简图
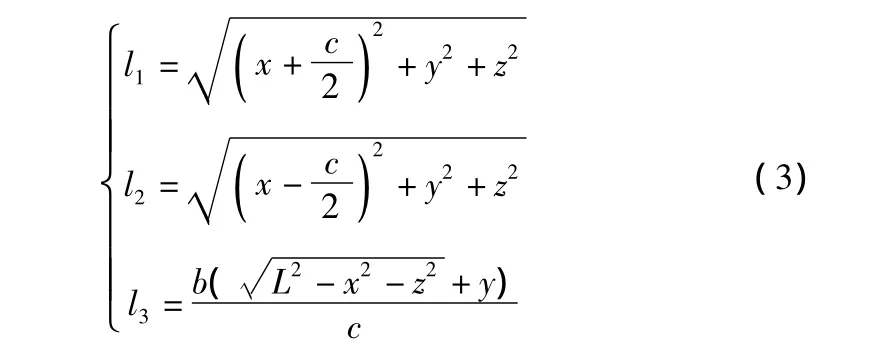
由于运动平台只做平动,可以不考虑姿态的因素。因此,运动平台的位置可以表示为:

式中:li——驱动杆的移动关节向量;
ri——固定平台的虎克铰的关节向量;
si——运动平台的虎克铰的关节向量。
对式(1)进行微分,则运动平台的位置误差可以表示为:


Δe1——驱动杆的行程误差引起的动平台位置误差。
Δe2——固定平台虎克铰的间隙引起的动平台位置误差。
Δe3——运动平台虎克铰的间隙引起的动平台位置误差。
2.1 驱动杆行程误差引起的动平台位置误差

则其运动平台位置误差与驱动器行程误差之间关系为:
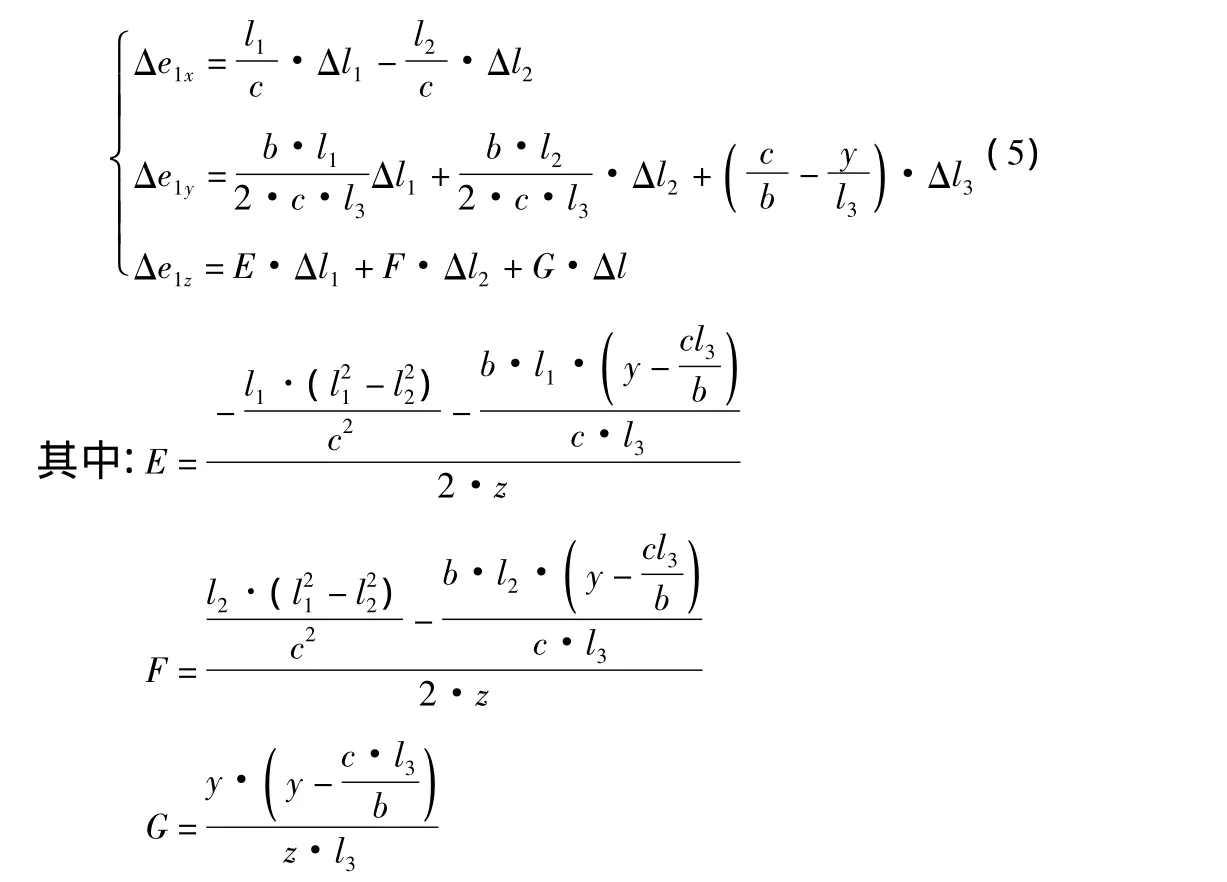
其中:J为雅克比矩阵,即误差的传递函数。求解式(4),驱动杆行程误差的显式解为:
2.2 虎克铰的间隙引起的动平台位置误差
铰链的间隙对机床的位置精度有重要的影响。根据误差的独立作用原理,机构的位置误差是各原始误差独立作用的叠加。因此,可以将多个虎克铰的间隙引起的运动平台的误差看作单一虎克铰的位置误差的叠加。由文献[6]可知:

i=1,2分别代表驱动杆1和杆2,i=3时代表平行机构。

其中:Δe2i:为i杆两端铰链点位置误差引起的运动平台位置误差,Δpri:为i杆固定平台上铰链点的位置误,Δpsi:为i杆运动平台上铰链点的位置误差。
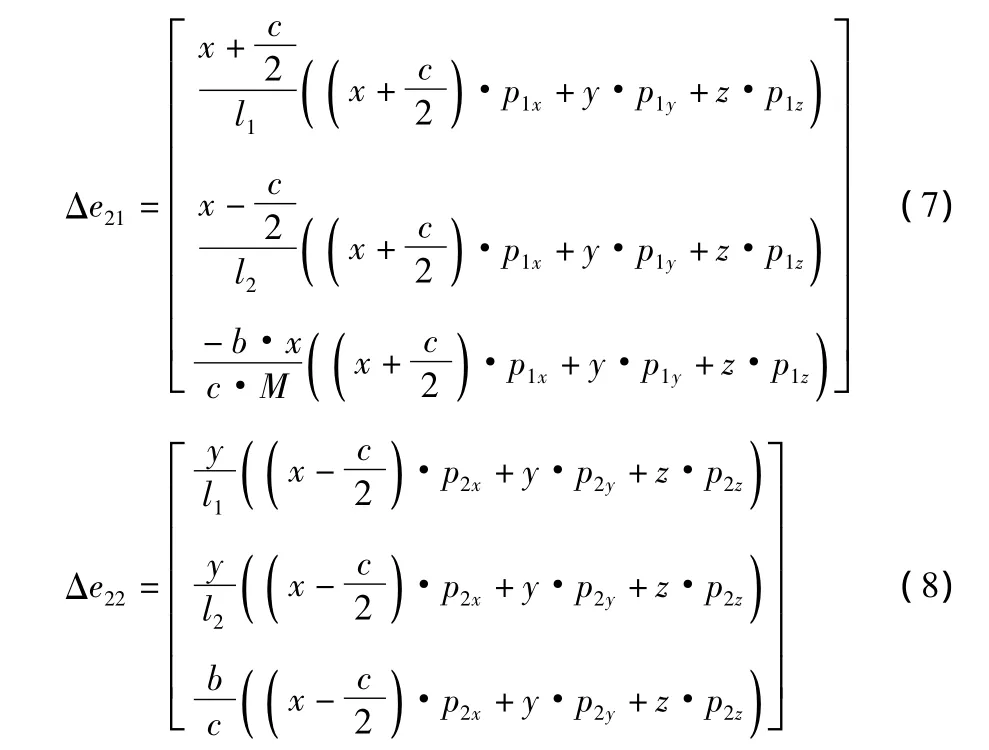
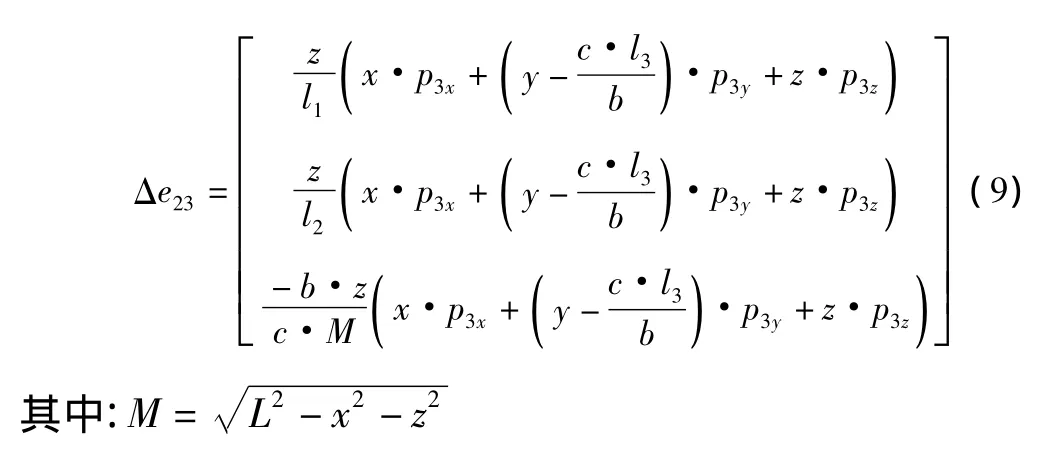
对式(6)求解可得虎克铰位置误差的显式解为:
3 误差分析
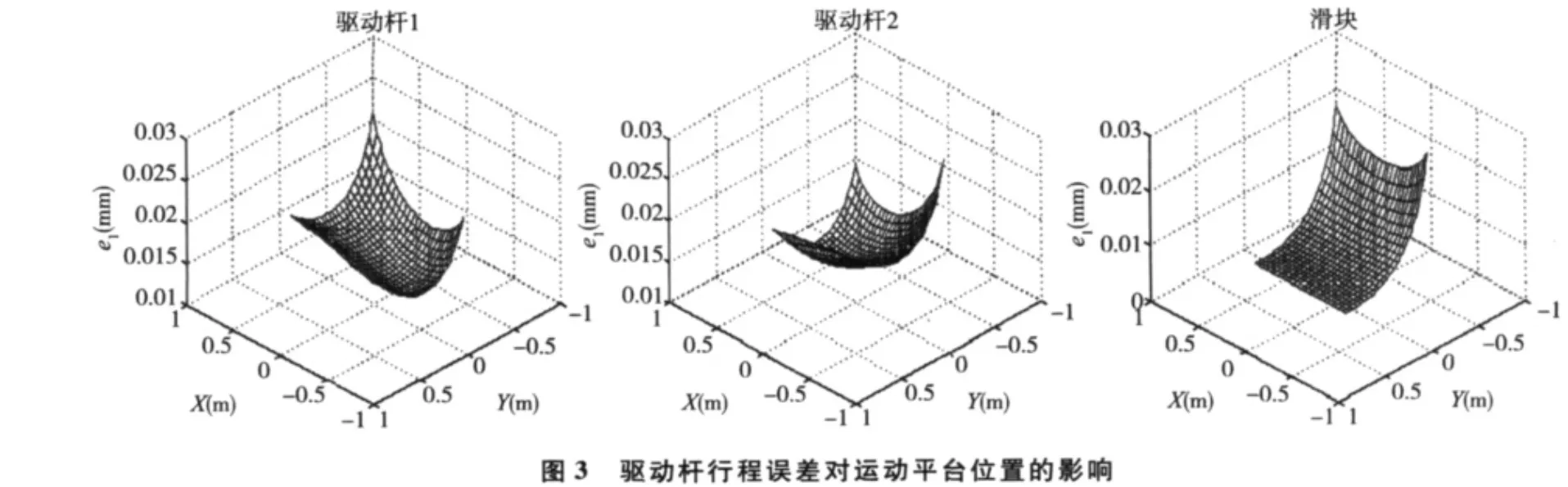
假设忽略另两个驱动器的影响,而只考虑某一驱动器对运动平台位置误差的影响时,便可获得每个驱动器对运动平台位置误差的影响程度。即当Δl=[0.01,0,0]T、Δl= [0,0.01,0]T、Δl= [0,0,0.01]T,b=0.8m,c=0.6m,在 z=0.65m 的平面内,驱动杆行程误差及虎克铰的间隙对运动平台位置误差的影响如图3、图4所示。由图3可以看出,随着X的增加,驱动杆1和驱动杆2的杆长误差引起的运动平台X方向的位置误差,具有相反的变化趋势;而滑块几乎不对运动平台X方向的位置误差产生影响。随着Y的增加,驱动杆和滑块对运动平台Y方向的位置误差的影响逐渐减小,其中滑块的影响要大于两伸缩杆产生的影响。在整个工作空间的内部其误差值较小,而在边缘处误差值较大。
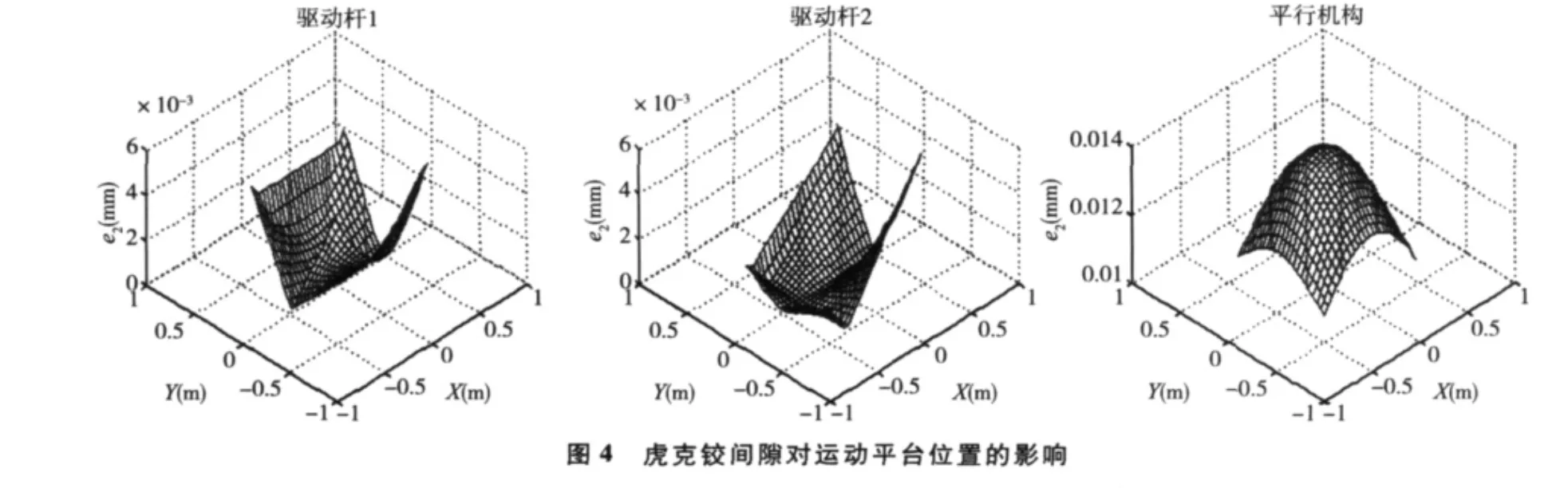
在图4中可以看出,伸缩杆铰链点误差引起的运动平台位置误差在工作空间的边缘处较大,而在内部较小。由平行机构铰链点误差引起的运动平台位置误差在工作空间的边缘处较小,而在内部较大。由于工作空间的内部为其主工作区,所以平行机构铰链点误差不容忽视。另外,从图中还可以看出,平行机构的铰链点引起的位置误差,其在整个空间内变化比较均匀;而两伸缩杆的变化却存在着突变。从误差的补偿角度看,平行机构的铰链点引起的运动平台位置误差变化较平稳,且其上端铰链点与滑块相连,而滑块具有较好可控性。所以,通过对滑块的误差补偿,可极大的降低铰链点误差对运动平台位置误差的影响。
4 结束语
本文提出一种混联机构新构型,在Solidworks环境下建立其三维实体模型。通过对运动平台位置误差模型的求解,获得其显式解。针对驱动杆行程误差及虎克铰间隙误差引起的运动平台位置误差,在工作空间内的进行了仿真和分析。研究结果表明:驱动杆1和驱动杆2的杆长误差引起的运动平台X方向的位置误差,具有相反的变化趋势;而滑块几乎不对运动平台X方向的位置误差产生影响。平行机构的铰链点引起的位置误差,其在整个空间内变化比较均匀,与之相连的滑块成为误差补偿研究的方向。
[1]魏永庚,王知行.基于神经网络的并联机床机构精度的研究[J]. 计算机集成制造系统,2003,9(9):755-759.
[2]Yongsheng Z,Qinchuan L,et al.A novel 5-Axis parallel machine tool family.In proceedings of the 11th World Congress in Mechanism and Machine Science,Tianjin,2004,1(4):1588-1591.
[3]A.H.Chebbi,Z.Affi,L.Romdhane.Prediction of the pose errors produced by joints clearance for a 3-UPU parallel robot.Mechanism and Machine Theory,2009,44(9):1768-1783.
[4]Yongbo Wang,Pekka Pessi,Huapeng Wu,Heikki Handroos.Accuracy analysis of hybrid parallel robot for the assembling of ITER.Fusion Engineering and Design,2009,84(7-11):1964-1968.
[5]Sebastien Britot,Llian A Bonev.Accuracy ananlysis of 3-DOF planar parallel robots.Mechanism and Machine Theory,2008,43(4):445-458.
[6]胡明.三杆并联平动机器人运动学、力学及误差的若干研究[D].沈阳:东北大学,1999.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
婚姻与家庭·性情读本(2017年1期)2017-02-16
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中国塑料(2015年9期)2015-10-14
CHIP新电脑(2014年5期)2014-05-14
