基于模糊控制的CASS工艺曝气控制仿真
2011-07-17 06:56王明智谢丽清刘洪波
水科学与工程技术 2011年5期
王明智,谢丽清,刘洪波,张 楠
(1.河北省水利水电第二勘测设计研究院,石家庄 050021;2.北方工程设计研究院有限公司,石家庄 050011)
基于模糊控制的CASS工艺曝气控制仿真
王明智1,谢丽清2,刘洪波1,张 楠1
(1.河北省水利水电第二勘测设计研究院,石家庄 050021;2.北方工程设计研究院有限公司,石家庄 050011)
以在线监测的DO(Dissolved Oxygen,溶解氧)值为控制变量,建立曝气过程的传递函数,设计模糊控制器,对CASS(Cyclic Activated Sludge System,周期循环活性污泥法)工艺曝气控制进行了模糊控制和PID控制的MATLAB仿真对比。结果表明:在响应速度和超调量方面,模糊控制优于PID(Proportion Integration Differentiation)控制,两者的稳态误差均在3%以内。
CASS工艺;曝气风机;模糊控制;计算机仿真
由于目前国内对CASS工艺的反应过程数据了解不够,所以对CASS工艺采用的控制方式大多是严格的时间控制(PID控制),而这种依赖于经验数据的控制方式并不能适应水量、水质的变化,且不利于系统的节能降耗。在CASS工艺的运行能耗分布中,曝气占运行总能耗的50%~60%[1],因此研究CASS的DO模糊控制对节能降耗具有现实意义。本文针对目前CASS工艺采用传统定时自动控制方法存在的问题,提出将模糊控制用于CASS工艺DO控制系统中,对CASS控制系统构建、模糊控制算法设计及MATLAB仿真。
1 DO模糊控制技术
控制问题的关键在于选取既可在线监测又可指示反应进程的控制参数。DO浓度是CASS系统好氧反应生化进程的主要影响因素之一,其变化规律能不同程度反应有机物降解、脱氮生化反应的进程[2];且DO浓度易于在线监测、响应时间短、精确度高,所以将其作为CASS工艺好氧段的控制参数是可行的。
本文以在线检测的初始DO作为CASS曝气量的模糊控制参数,不仅可以及时控制系统内DO处于合适水平,而且也可最大限度地减少后续过程曝气量的调整频率[3,4]。工程实践中,CASS工艺的曝气控制可以根据反应阶段DO的特征值,调整曝气量,实现阶段DO模糊控制,也能达到良好的节能效果[1]。
2 控制系统结构及传递函数
2.1 控制系统结构
DO模糊控制系统组成如图1所示。

图1 DO模糊控制系统组成
图1所示的控制系统是由溶解氧监测仪、模糊控制器、变频风机及送风管路组成的闭环控制系统。送风管路上安装压力计、温度计。由溶解氧监测仪将实时监测的溶解氧浓度值作为测量信号送入控制器;在控制器内部与给定DO值进行比较,比较的结果即为偏差信号;控制器将此偏差信号进行模糊运算后输出至变频装置,从而控制曝气池内的溶解氧浓度。
为实现CASS系统的曝气量调节的自动化,为变频风机配备无速度反馈的U/f可调的变频器。在变频器上采用模糊控制技术,即将一个微控制器(模糊控制器)连接至变频器,微控制器使用模糊控制算法实现变频器的模糊控制。
2.2 传递函数
在CASS工艺的好氧曝气阶段,所需风量与溶解氧呈非线性关系,且整个活性污泥系统各影响因素具有时变性、耦合性等特点,难以建立精确数学模型。因此对CASS好氧区作以下几个假设:①好氧区空间上呈完全混合状态;②好氧区的反应速率为一级;③一个周期内,好氧区总生物量近似不变。基于以上假设,对好氧反应的溶解氧作物料平衡计算[5],可得被控对象为一个一阶惯性环节:

据DO检测仪的测定原理对模型进行修正[6],将检测滞后用纯滞后τ表示,式(1)修正后为:

式中 K为反应速率常数;τ为纯滞后时间。
根据实验数据及工程经验,将传递函数具体化为[7]:

3 模糊控制器的设计
3.1 控制器结构设计
本文拟选用单变量二维模糊控制器,控制器的两个输入变量基本上都选用受控变量和输入给定的偏差E和偏差变化EC,能较严格的反映受控过程中输出变量的动态特性。以在线检测的DO值为控制变量,以曝气量的变化量为被控变量。
曝气量模糊控制器的结构设计,选择以在线检测的DOi与设定的DO初始浓度值(DOS)的偏差EDOi作为控制器的一个输入变量。确定采样周期为1min。一个采样周期后该偏差EDOi的变化量CEDOi作为控制器第二个输入变量。这两个输入变量,经模糊控制器的计算、判断与决策,控制系统输出结果是输出量ΔU即变频风机的频率VRI。系统在DO为2mg/L左右的条件下运行较合理经济[8],因此控制初始DO浓度为2~2.5mg/L。
3.2 变量及隶属函数
误差EDO、误差变化ECDO及输出变量Δll的模糊集及论域如下:
EDO的模糊集eDO为 {NB,NM,NS,NO,PO,PS,PM,PB};ΔU和ECDO的模糊集 Δu和ecDO均为{NB,NM,ZO,PS,PM,PB}。
EDO的基本论域为(-0.6,0.6),ECDO的基本论域为(-0.15,0.15);ΔU的基本论域为(-4,4)。通过整型化处理,将连续检测的DO偏差EDO及计算出的CEDO化为在对应论域上的离散整型变量XEDO、XCEDO。
各模糊变量的隶属函数均选择三角形型函数。
3.3 模糊规则和决策
对于曝气量变化的控制原则为:当偏差较大或大时,选择控制量应以尽快消除偏差为主;当偏差较小或小时,应以系统稳定性为主,注意防止超调。根据专家理论和实践经验,采用模糊条件推理if A and B then C,可用表1来表示56条控制规则。
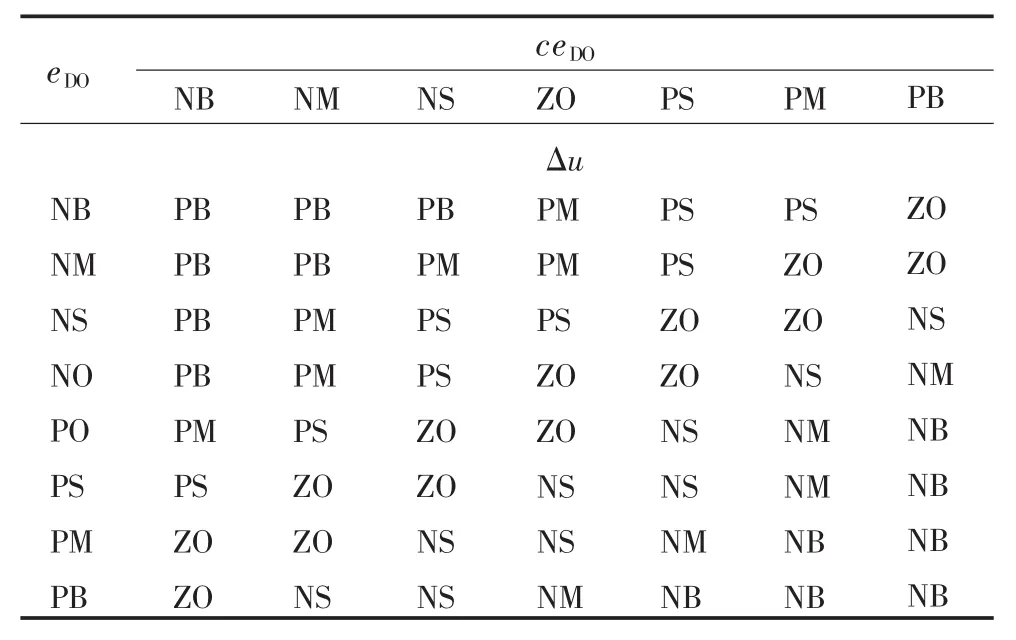
表1 模糊控制规则表
模糊推理,采用马丹尼极小运算法。解模糊化法,采用最大隶属度平均值法。
3.4 模糊控制器的生成
采用模糊逻辑工具箱提供的常用工具函数,如newfis,addvar,addmf, addrule,evalfis等,用命令方式生成和编辑模糊推理系统(FIS文件),得到模糊推理系统的输出曲面观察器,如图2所示。

图2 模糊推理曲面观察
4 模糊控制仿真及对比
4.1 控制系统的仿真
利用MATLAB模糊控制工具箱设计模糊控制器,在Simulink窗口中设计模糊控制系统,并选用四阶-龙格库塔法进行仿真计算。运行模糊控制仿真系统,所得的仿真曲线如图3所示。从图3可知,模糊控制的超调量较小,最大不超过6.0%,响应时间为0.63s,稳态误差小,不超过±3.0%。该模糊控制器适用于变频器对风量的控制。

图3 模糊控制仿真结果
4.2 模糊控制仿真与PID控制仿真的对比
为比较模糊控制器的性能,设计了PID控制器对变频器进行仿真,仿真结果如图4所示。

图4 PID控制仿真结果
5 结语
本文为CASS系统曝气过程的变量溶解氧设计了模糊控制,并建立了风机变频控制的传递函数模型;为风机变频器设计了模糊控制算法,并应用MATLAB软件对变频器进行了模糊控制和PID控制的MATLAB仿真。仿真结果表明:采用模糊控制的响应时间为0.63s,最大超调量为6.0%;采用PID控制的响应时间为 1.78s,最大超调量为 20.0%;模糊控制和PID控制两者的稳态误差均低于±3.0%。比较以上两种算法可知,模糊控制响应速度快、调节时间短、超调量小,选择模糊控制算法来控制风机变频器具有优势。
但在实际控制过程中,要实现精准的控制,必须通过实测响应曲线的方法来获得响应时间,并由响应时间和变量的行走速度及峰值的位置来确定变量控制超前时间。
[1]宋桂杰,张韵.CASS工艺中曝气系统节能技术探讨[J].给水排水,2009(35):67-72.
[2]薛福霞,刘载文,等.模糊控制技术在污水处理系统的应用[J].北京工商大学学报,2005,26(3):24-27.
[3]高景峰,彭永臻,等.以DO、ORP、pH控制SBR法的脱氮过程[J].中国给水排水,2001,17(4):6-11.
[4]高景峰,彭永臻,等.以pH和ORP作为SBR法反硝化模糊控制参数的基础试验研究[J].环境科学,2002,23 (1):39-44.
[5]Valnyr V asconcelos Lira,Jose Sergio da Rocha Neto,Pericles Rezende Barros,and Adrianuus Cornelius van Haandel.Automation ofan anaerobic-aerobic wastewatertreatmentprocess.IEEE Transaction on Instrumentation and Measurement.2003,52(3):909-915.
[6]姚如飞,林德全,等.活性污泥系统中曝气机的速度控制[J].中国给水排水,2000,16(2):53-54.
[7]刘均.基于PROFIBUS的污水处理厂自动控制系统的研究[D].杭州浙江工业大学,2002.
[8]王淑莹,顾升波,等.SBR工艺实时控制策略研究进展[J].环境科学学报,2009,29(6):1121-1130.
Simulation of CASS Aeration Control based on Fuzzy Control
WANG Ming-zhi1,XIE Li-qing2,LIU Hong-bo1,ZHANG Nan1
(1.The Second Design and Research Institute of Water Conservancy and Hydropower of Hebei,Shijiazhuang050021,China2.NORINDAR International,Shijiazhuang050011,China)
CASS process;aeration fan;fuzzy control;computer simulation
X703.1
A
1672-9900(2011)05-0026-03
2011-08-15
王明智(1985—),男(汉族),河北武邑人,助理工程师,主要从事给水排水工程和水利水电工程设计工作,(Tel)13398610371。
Abstrcat:To improve the auto-control of the aeration in CASS process,the online-monitoring DO value was chosen as the control variable,then a transfer function was established for the aeration process and a fuzzy controller was designed.The simulation of the fuzzy controller and a PID controller was run in MATLAB.The results show that the fuzzy control was superior than the PID control in response speed and overshoot.Both the steady-state error were within 3%.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
科学与信息化(2020年11期)2020-06-19
测控技术(2018年10期)2018-11-25
计算机测量与控制(2017年6期)2017-07-01
水利科技与经济(2017年6期)2017-04-28
西南交通大学学报(2016年3期)2016-06-15
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22