
虚拟维修中虚拟人的动作模型设计
2011-07-29 08:33常高祥徐晓刚
图学学报 2011年1期
常高祥, 徐晓刚, 张 雷
虚拟维修中虚拟人的动作模型设计
常高祥, 徐晓刚, 张 雷
(海军大连舰艇学院装备系统与自动化系,辽宁大连 116018)
提出了一种基于维修任务分解的虚拟人动作模型设计方法,将虚拟维修任务分解为三个过程,建立了三个相应的维修动作层次化模型,阐述了维修动作的分类与设计,并将维修动作模型应用到了虚拟维修过程中。实验结果表明,基于维修任务分解的虚拟人动作模型可以有效地将虚拟人技术应用到虚拟维修中,大大提高了虚拟维修的逼真性。
虚拟现实;虚拟维修;维修任务分解;动作模型
虚拟维修是虚拟现实技术在设备维修中的应用体现,是实际维修过程在虚拟环境下的实现,是一种人机交互过程的仿真。随着计算机软硬件及虚拟人技术的发展,虚拟人在虚拟维修中的地位也越来越重要。如何逼真、方便地模拟人体动作,成为虚拟维修的一项关键性技术。维修任务的分解是实现维修活动仿真的基础,应将维修作业分解到能够支持模拟的程度才能实现维修仿真。
1 维修任务分解模型的建立
维修任务分解思想最早是由爱荷华大学(The University of Iowa)CAD中心的Ranko Vujoservic,他认为应将维修作业分解到能够支持模拟的程度才能实现维修仿真。他提出了维修作业的层次结构模型,共分为四层,从上到下依次是:维修作业层、拆装顺序层、拆装步骤层、宏运动和宏模型层次。为了进行维修性的研究,Iowa 大学研究制造了一个被称为维修性分析工作站(Maintainability Analysis Workstation,MAW)的系统,基本实现了基于仿真的维修性分析。
乔治亚工学院的SRL(System Realization Laboratory)在进行DFD研究时,将拆卸分为作业(task)与操作(operation)。作业又分为三个层次,即层次3(task level 3),层次2(task level 2),层次1(task level1)。
国内的石家庄军械工程学院将维修过程分解为维修准备和实施维修两个阶段,华中理工大学以及国防科大将动素引入到了维修分解中,但是对整个维修过程的分解还不够合理,不能满足大型复杂装备的维修仿真。但是,其中的分层设计思想值得借鉴,将维修动作进行分层,以实现不同层面上的维修仿真。
虚拟维修仿真是对真实维修活动的再现,应将人体运动、维修工具和维修对象三者结合起来,对整个维修过程进行分解,并将每个过程的虚拟人运动进行分类,建立层次化的虚拟人动作模型。
本文提出了一种基于过程分解的维修任务分解模型,将整个维修任务分解为:
· 人体移动过程 虚拟人从当前位置变换到作业位置的过程;
· 姿态调整过程 虚拟人调整姿态到能够进行作业的过程;
· 维修作业过程 虚拟人运用工具或徒手进行维修作业的过程。
2 面向任务分解的维修动作分类
维修任务分解的目的是为了更方便地实现虚拟人维修动作仿真,任务分解层次对动作分层有着指导性的意义。
2.1 层次化动作模型的建立
虚拟人动作的分层设计思想是根据维修任务分解后的各个过程,将维修动作进行层次化分解,按照动作的复杂性和任务相关语义的抽象程度,可以将每个维修过程的维修活动分为若干层次,由下到上初步分为三层:任务无关的动作元素、与通用语义相关的动作单元、面向任务的作业单元。
定义1 动作元素(Motion Element) 动作元素简称动素,通常按照人体关节链和运动自由度来进行划分,一般是涉及若干关节的一段连续运动轨迹,带有一定的维修语义,但基本不与任务语义相关。
定义 2 动作单元(Action Unit) 动作单元简称动作,一般由若干动素根据一定语义规则构成,这些语义属于通用意义上对人体维修活动的描述,与特定任务无关。
定义 3 作业单元(Task Unit) 作业单元简称作业,是在动作元素和动作单元的基础上面向特定领域任务构造的。作业单元用来描述人体模型在一段时间内为达成某一较小的维修目标而完成的各项维修活动的总称,这些维修目标可以通过对具体维修任务进行分解后得到。
图1是维修任务分解后,三个维修过程的维修动作层次化模型。

图1 三个维修过程的维修动作层次化模型
2.2 维修动作分类与设计
维修作业包含大量的维修动作,而每个动作又涉及到大量关节的运动。如果对每个作业都进行动画仿真,将会花费大量的时间和精力。
要提高仿真的效率就不能将动作设计的重点放在作业层和动素层上,而是放在动作层。作业层定义的人体运动非常抽象,不能设计出通用的人体运动单元;动素层没有任何维修的语义出发点更不能在此层。
2.2.1 现有的动作分类
(1)爱荷华大学计算机辅助设计中心的动作分类
John D.lanni认为七种基本活动就足以描述大部分的作业,并把常见动作分为:虚拟人移动(Position),触摸一个物体(Touch),获得一个物体(Get),将物体移动到另一位置(Put),看某个地方(LookAt),使用工具(UseTool),对机器进行操作(Operate)。
(2)乔治亚工学院的分类方法
SRL实验室在对拆卸过程进行描述时,将最基本的动作称为(Operation),并将操作具体分为:Grabbing、Removing、Releasing、Unfastening,其中Releasing指徒手操作,Unfastening指利用工具操作。
(3)人机功效领域的分类方法
从人机功效领域出发,一般包括萨布里克动素、MODAPTS (Modular Arrangement of Predetermined Time Standard)动作、MTM(Methods-Time Measurement)动作、PMT-X系统的动作等。
吉尔布雷斯夫妇首先定义了萨布里克动素,将维修动作划分为3大类18个动素。但他们的工作侧重于分析动作的必要性,尽可能去除去掉多余动作。他们的分类方法不适用于虚拟维修仿真的实现,但其动素的思想非常值得借鉴。
人机工程学在进行作业时间分析时,常用的几种动作分析方法包括 MTM 法、模特排时法、WF 法和 PMT-X 系统。MTM 法又称为方法-时间衡量法,将动作划分为伸手、旋转、加压、抓取等 18 个动作,主要用于汽车设计中的人机工效学分析,划分仍显粗糙,并不适合直接刻画维修仿真过程。澳大利亚Heyde 博士在长期研究 MTM 等方法的基础之上提出了模特排时法(MODAPTS),将动作分为移动动作、终结动作和辅助动作,但他的分类思路从仿真的角度来看有些混乱,有的按作用分类,有的按关节运动分类。WF 法的分类过于粗糙,不利于实现仿真中的交互行为。PMT-X 系统主要面向低重复度作业的时间分析,是在 MTM 基础上进一步简化和合并得来,从 18 个动作进一步简化为 9 个。
总的来说,上述动作分类方法多数是为了单纯进行人机工效学分析与评价而设计的,没有考虑到人体运动仿真的需求。目前,还缺乏以人体活动为中心的,以维修仿真和人素分析为应用背景的动作分类方法。
2.2.2 动作模型分类与设计
本文面向维修任务,以人体运动为核心,针对维修任务分解后的三个维修过程,设计了一套适合虚拟维修的动作模型。
人体移动类动素 人体移动过程中要用到的动素,该类动素的功能是完成虚拟人从一个作业位置变换到另一个位置。人的移动可以分为位置变换、转向两种。其中位置变换即人移动重心从空间位置A到B的动作。转向指人的重心基本保持不动,只是人体由面向物体A到B的过程。人体移动过程是这两种移动方式交叉运用的过程。
姿态调整类动素 当虚拟人变换到作业位置时,要调整姿态以能够对目标零件进行操作,这期间的所有动素都属于姿态调整类。
维修作业类动素 利用工具或徒手完成对零件拆、移动、修理、更换、安装等操作过程中用到的动素。维修作业类动素最为复杂多样,对其进行分析总结后发现可以将其分为:徒手作业、使用工具作业。
在表1中,给出了三大类动素的详细分类。
3 维修动作仿真
仿真实验在Intel(R) Celeron(R) CPU 2.66GHz,GeForce6200显卡,Windows XP操作系统,VS2005.net及torque script(Torque Game Engine三维引擎的脚本语言)环境下完成。
仿真流程图如图2所示,虚拟人首先进行位置移动,找到要进行操作的零件,然后进行姿态调整、维修作业,将虚拟零件上的装配点与虚拟人手部上的装配点对齐,使虚拟人获得零件的控制权,虚拟人携带零件移动到合适位置将零件放置到该位置,完成一次拆卸操作。
维修动作仿真要把建立的维修动作模型通过动画的方式表现出来,实现对设备的虚拟维修。在维修过程中注重虚拟人动作的细节刻画。图3是虚拟人对某型火炮进行维修作业的一个实例,先从身管组上用锤子卸下启动器,将启动器放置到维修桌上,用手将启动器弹簧和带齿轮轴的齿轮抽出,用小撬杠撬出气缸活塞,用卸环钩卸掉活塞上的密封环。
由图3可以看出,运用虚拟人技术可以很逼真地刻画出真实的维修作业过程,提高了虚拟维修的交互性和逼真度。另外对计算机硬件的要求不高,可以大大降低虚拟维修训练的成本,有较好的实用价值。
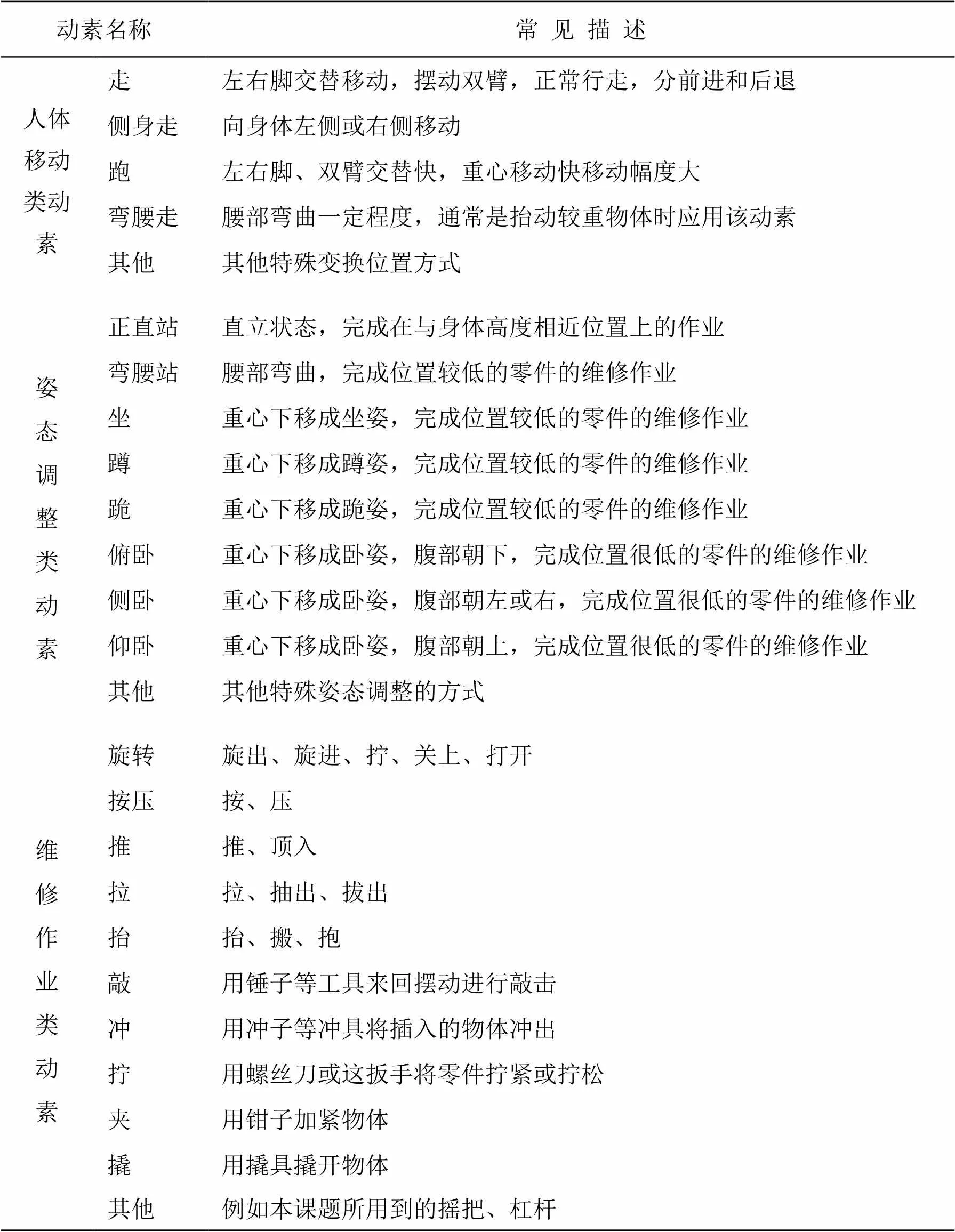
表1 虚拟人的维修动素分类表

图2 维修仿真流程图

图3 虚拟人维修作业实例
4 总 结
本文通过对虚拟维修任务进行分解,建立了三个层次化的虚拟人维修动作模型,从而很好地将虚拟人技术应用到了虚拟维修过程中,可以利用虚拟人对装备进行实时的维修操作,大大提高了虚拟维修的真实感。
[1] Ranko Vujosevic. Maintainability analysis in concurrent engineering of mechanical system [J]. Research and Applications, 1995, 3(1): 20-23.
[2] Bauer M D, Siddique Z, Rosen D W. Virtual prototyping in simultaneous product/process design for disassembly [C]//Rapid Response Manufacturing: Contemporary Methodologies, Tools and Technologies, 1997. John Dong (editor). Chapman Hall, London, 1997: 141-175.
[3] 柳 辉. 维修活动仿真中人体运动控制方法及实例研究[D]. 石家庄: 军械工程学院, 2002.
[4] 周 炜, 刘继红. 虚拟环境下人工拆卸的实现[J]. 华中理工大学学报, 2000, 28(2): 45-47.
[5] 卢晓军. 维修仿真中虚拟人动作建模与行为控制技术研究[D]. 长沙: 国防科学技术大学, 2006.
[6] 彭晓军. 面向人素分析的虚拟维修系统的设计与实现[J]. 计算机仿真, 2008, 25(9): 242-320.
[7] John D Ianni. A specification for human action representation [C]//Digital Human Modeling for Design and Engineering, International Conference and Exposition, The Hague, The Netherlands, 1999: 32-35.
The Design of Virtual Human’s Action Models in Virtual Maintenance
CHANG Gao-xiang,XU Xiao-gang,ZHANG Lei
( Department of Equipment System and Automatization, Dalian Naval Academy, Dalian Liaoning 116018, China )
Based on the mission of virtual maintenance, the process of maintenance are separated into three courses, and three corresponding straticulate action modes are established, the sort and design of maintenance action are expatiated, and the maintenance action models are applied in virtual maintenance. The experimental results indicate that the action models of virtual human based on decomposing maintenance mission can improve greatly the reality of virtual maintenance.
virtual reality; virtual maintenance; decomposition of maintenance mission; action model
TP 391.9
A
1003-0158(2011)01-0099-05
2009-08-19
辽宁省自然科学基金资助项目(20082176);“浙江大学CAD&CG国家重点实验室”开放课题资助项目(A0906)
常高祥(1986-),男,河南汝阳人,硕士研究生,主要研究方向为虚拟维修。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
小哥白尼(趣味科学)(2022年1期)2022-04-26
大科技·百科新说(2021年10期)2021-12-31
数学小灵通(1-2年级)(2021年4期)2021-06-09
小猕猴学习画刊·下半月(2019年6期)2019-08-13
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
特别健康(2018年3期)2018-07-04
中学生数理化·七年级数学人教版(2018年6期)2018-06-26
初中生世界·七年级(2017年9期)2017-10-13
铁道通信信号(2016年1期)2016-06-01
