
一种基于红外传感器的无人机姿态测量方法
2012-03-17 07:21吴成富马松辉
电子设计工程 2012年17期
吴成富,冯 喆,马松辉
(西北工业大学 无人机重点实验室,陕西 西安 710065)
无人机的姿态角是无人机稳定控制与导航的最基本与最重要的参数之一。传统的姿态测量方法主要采用惯性导航系统,利用陀螺仪和加速度计等惯性器件对姿态角进行测量。但陀螺仪在长时间工作时,会出现较大的累计误差,因此利用这些传感器测得的飞行姿态较难实时反映微小飞行器空中的高动态运动状况[1]。同时,无人机的发展趋于微小型化,要求采用体积小、成本低并满足任务要求的姿态测量装置。
文中提出的用红外传感器测量姿态角的方法,运算速度快,准确性较高,可以用于飞行器实时姿态测量。具有非接触、全场测量和无漂移等特点,且动态品质好,不存在累计误差;另外相比传统的姿态测量装置,成本较低,体积较小,重量较轻,功耗低,适合于长时间的飞行任务;且红外线的环境不受光照程度的影响,安装了红外传感器的无人机可以在夜间飞行。
1 红外传感器姿态测量原理
红外温度传感器由热吸收区(热端)、硅基片(冷端)及外封装组成,它的工作原理是基于热电偶原理,即通过吸收天空和地面辐射的红外线能量,输出一个与温度成比例关系的电压信号[2]。
利用红外温度传感器测量姿态的主要原理是根据地面和天空的温度差值来估计无人机的倾斜角度。一般情况下,天空的温度比地面的温度低。将两个红外温度传感器反方向对称放置在同一轴线上,当两个红外传感器水平时,所感受到的天空与地面的温度相同,则两个红外传感器的输出电压值相同,电压差值即为零。当红外传感器发生倾斜时,朝向天空一端的传感器感受到的温度比朝向地面一端的传感器感受到的温度低,两端传感器的输出电压则会发生变化。输出电压随无人机倾斜角度的变化而变化,即可计算出倾斜角度大小。根据这一原理,两个对称的红外温度传感器即构成了单轴无人机姿态测量系统。
用于无人机姿态测量的红外传感器为红外温度传感器。
2 三轴红外传感器
基于上述原理,且考虑到红外传感器自身视场角的限制,文中将三对红外传感器按两两组合的方式正交安装,以实现对无人机的姿态测量。为了便于安装,本文选择的红外传感器为FMA Direct Co-Pilot飞行增稳系统中的水平传感器和垂直传感器,如图1所示,其视场角为90°[3]。FMA Direct Co-Pilot是利用红外线辐射检测天地之间温度差来使飞机稳定飞行的仪器,澳大利亚Monash大学飞行器研究小组等多家单位已对其性能进行了验证[4]。
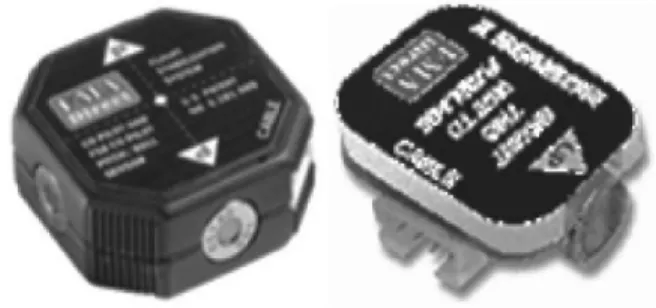
图1 FMA Direct红外传感器Fig.1 FMA Direct infrared sensor
水平传感器有两个相互垂直的通道,垂直传感器有一个通道,每个通道由两个反方向对称放置的红外传感器构成。水平传感器安装在飞机机头下方,为了获得更好的视场角,使其与机头机尾中心轴线成45°安装。垂直传感器可装置于飞机任意位置,当飞机水平时保持垂直即可,具体安装方式如图2所示。传感器的3个通道构成X轴Y轴Z轴,即为正交的三轴红外传感器测量装置,Z轴与机体坐标轴Zb重合,X轴Y轴与机体坐标轴Xb,Yb轴夹角均为45°。

图2 红外传感器在无人机上的安装方式Fig.2 IR sensors on UAV
3 无人机姿态角解算
3.1 传感器性能测试
为了获得红外传感器的输出电压与对地倾斜角度之间的函数关系,本文采用系统辨识的方法确立红外传感器的输出与输入模型,即通过实验来观测系统的输入与输出,从而确定系统的模型。
所用到的实验设备为一台单轴小转台,一块DSP数据采集板,FMA Direct水平红外传感器。由于红外传感器视场角内不能出现热源干扰,所以选择在开阔的场地进行实验。
将水平红外传感器固定于转台上,从-90°到90°,以通道2方向为轴线,每次将转台旋转10°,记录下通道1方向红外传感器的对地倾角和通道1通道2的输出电压,分别在不同气温环境下进行实验。以倾斜角度-90~90为横坐标,以输出电压为纵坐标,根据所得数据,画出散点图,并进行曲线拟合,得到曲线如图3所示。其中图3(a)为气温22°,天气多云的情况下通道1所得曲线。图3(b)为气温18°,天气阴的情况下通道1所得曲线。图3(c)为气温3°,天气阴的情况下通道1所得曲线。图3(d)为气温22°,通道2的输出信号散点图。
观察图3(d),通道2的两个红外传感器始终水平,所以输出电压保持不变,近似为一条直线。 图 3(a)(b)(c)中 3 种气温环境下的拟合曲线基本一致,根据以上拟合曲线可以得到红外传感器输入与输出之间的函数关系:
V=Vhsin(Kφ)+Vb(1)
其中V为输出电压,φ为红外传感器对地倾角,Vb为偏置电压,Vh为最大偏差电压。当红外传感器水平时,两端检测到的温度相同,理论上输出电压为零,但实际电路中存在偏置电压,即为Vb。红外传感器垂直时的输出电压为最大电压,最大电压与Vb之间的偏差即为最大偏差电压Vh,红外传感器正向垂直与负向垂直的输出值不同,取其平均值即得到Vh。

观察相同温度下的两组曲线,发现倾角为10°时,两组数据一致性较好,说明此时所测的输出电压误差最小,则选取倾角为10°时的输出电压计算K值。表1给出了多次实验测得的具体数据。
根据表1所示数据,K的值不受温度和环境的影响,对上表中多次实验所得的K取平均值,得K=1.26。而由于不同的地面环境及天气状况会使红外线产生一定的偏差,所以在飞行前需要对红外传感器特性进行场地校正,具体方法是:在试飞前,将红外传感器水平放置,输出电压即为Vb。将红外传感器正向垂直放置,即对地倾角为90°,记录下输出电压的最大值Vmax,将红外传感器反向垂直放置,即对地倾角为-90°,记录下输出电压的最小值Vmin,由此可得到Vh的值。在实际应用中,可在飞机的滑跑阶段,记录下水平传感器的输出即为Vb,垂直传感器的输出即为Vmax。
综上可推导出根据红外传感器的输出电压计算红外传感器对地倾角的经验公式:
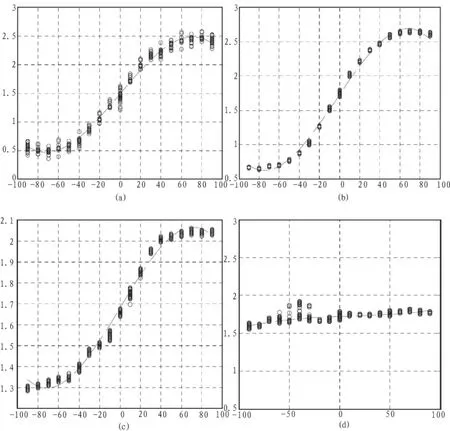
图3 实验数据拟合曲线图Fig.3 Fitting curve of test data

表1 红外传感器测试数据Tab.1 Test data of infrared sensor
3.2 姿态角解算
红外传感器测量的 3个角度φx,φy,φz分别是3对红外传感器相对于地面的夹角,而无人机姿态角是在机体坐标系下定义的,在实际使用中需要利用方向余弦矩阵(DCM)进行转换[5]。由地面坐标系到机体坐标系的DCM如下所示:

根据DCM,可以将红外传感器的对地倾角转化成无人机的姿态角。
当水平传感器倾斜45°安装,且俯仰角为θ和滚转角为Ø时,3对红外传感器的对地倾角φx,φy,φz的计算公式如下:

综合式(3),(4)可得,无人机姿态角的解算公式为:

由于俯仰角定义在(-90,90)区间,与反正切函数主值在同一个区间,不存在多值问题,而滚转角定义在(-180,180)区间,会存在多值问题。
根据Z轴的输出,可以判断无人机姿态角所处的象限。当 Uz大于 Vb时,滚转角在(-90, 90)区间。
当 Uz小于 Vb时,有 Uz-Vb<0,即 Vhsin(Kφz)=Vhsin(K cosØcosθ)<0,因为俯仰角定义在(-90,90)区间,所以 cosθ>0,则 cosØ<0,从而得到滚转角在(-180,-90)区间和(90,180)区间。
当 Ø 在(-180,-90)区间时,输出的主值大于 0,Ø=输出的主值-π
当 Ø 在(90,180)区间时,输出的主值小于 0,Ø=输出的主值+π
通过以上计算流程可以实现俯仰角:-90°~90°,滚转角:-180°~180°的测量。
4 太阳干扰
某些情况下,太阳辐射可能进入红外视场。在红外传感器工作的光谱波段,太阳辐射功率比地球辐射功率大300倍以上,这极大的干扰了传感器的正常工作[6]。因此,在红外传感器测量姿态角的算法中,必须考虑到太阳干扰问题,以确保姿态信息准确输出。
文中通过场地实验对太阳干扰的情况进行了验证。图4为正午12点太阳位于正上方时,红外传感器的输入输出特性散点图及拟合曲线。

图4 太阳干扰下的红外传感器输出散点图Fig.4 Infrared sensor output scatter plots under the sun interference
观察图 4 所示曲线, 在对地倾角为 (-90°~-50°),(30°~90°)的区间内,输出电压分别为红外传感器所能输出电压的最小值0 V和最大值2.999 V。而在其他角度范围内,由于没有太阳辐射进入红外传感器的视场角,对红外传感器无干扰,输出曲线与无干扰情况下近似一致。由此可见,太阳信号进入红外视场后,红外传感器将输出远高于正常红外信号的输出电压。
根据以上实验,本文采用阈值法来消除太阳干扰。根据公式(1),V=Vhsin(Kφ)+Vb,则 V 的最大值为 Vh+Vb,V 的最小值为Vb-Vh。当红外传感器某一通道的输出电压超出这一范围时,则认为这一通道被太阳辐射干扰,对这一通道的输出忽略不计,根据剩余两通道的输出值解算无人机的姿态角。
以Z轴被太阳辐射干扰为例,假设Z轴的输出电压Uz超过阈值,则忽略Z轴的输出电压,根据X、Y轴的输出计算飞机的姿态角,公式如下所示:

5 机载飞行实验
为了验证以上算法,将水平红外传感器和垂直红外传感器分别安装于小型固定翼无人机上进行机载飞行实验。实验时气温30°,太阳位于天空东南方向。实验输出曲线如图5所示,图中实线为俯仰角,虚线为滚转角。
图5(a)为俯仰运动曲线,滚转角始终保持在零值附近,当飞机姿态发生大角度变换时,会产生一定的偏移,但当飞机姿态稳定时,能迅速回归零值。飞机在A段做水平直线飞行,俯仰角在零值附近震荡。A段之后飞机开始向上俯仰飞行,到B段俯仰角接近50°。B段之后飞机开始向下俯仰,到C段飞机俯仰角为45°。C段之后飞机迅速恢复水平,这时俯仰角与滚转角均产生较大的震荡。D段飞机继续做水平直线运动。
图5(b)为滚转运动曲线,俯仰角始终保持在零值附近。飞机在A段做水平直线飞行,滚转角在零值附近震荡。B段飞机开始向左滚转,滚转角逐渐减小至-60°。C段飞机保持在滚转角-60°。D段飞机开始向右滚转,滚转角逐渐增大。E段飞机平飞,滚转角为0°。

图5 机载飞行时输出的姿态角曲线图Fig.5 Airborne flight attitude angle curve
如图5曲线所示,飞机在做水平直线飞行时,俯仰角与滚转角均保持在零值附近,误差在3°左右。飞机向左滚转60°时,滚转角保持在-60°附近,俯仰角保持在0°附近,误差在2°左右。只有刚上电时及飞机发生大幅度姿态变化时,姿态角会产生较大的震荡,其余状态下误差均在允许范围之内。且天空中的太阳干扰对实验结果并无影响,说明此算法可以很好的避免太阳辐射干扰。
6 结 论
文中将红外传感器应用于无人机姿态角测量,通过对红外传感器特性的场地测试,对各个参数进行标定,利用系统辨识法建立其输入输出模型;再进行不同坐标系之间的角度变换;同时考虑到太阳辐射干扰,用阈值法对干扰进行消除。机载飞行实验的结果表明,即使天空中存在较强太阳辐射干扰,通过本文研究的算法解算的姿态角依然可以较好的反映无人机飞行过程中的姿态信息,准确度较高。并且红外传感度成本低,体积小,安装方便,可以广泛应用于无人机姿态测量系统中。进一步的工作是引入Kalman滤波,以提高姿态角的测量精度,能更好的获得无人机的姿态信息。
[1]蔡瑜,叶雄英,朱荣,等.用于微小飞行器姿态测量的红外地平仪研制[J].仪表技术与传感器,2009(7):33-35.
CAIYu, YE Xiong-ying,ZHU Rong,et al.Infrared horizon detector making for measuring micro air vehicle attitude[J].Instrument Technique and Sensor,2009(7):33-35.
[2]张鹏翼,罗卫兵,楼超英.红外传感器在无人机姿态平衡系统中的应用[J].电光与控制,2007,14(6):170-172.
ZHANG Peng-yi,LUOWei-bing,LOU Chao-ying.Application of infrared sensor in attitude balance system of UAV[J].Electronics Optics & Control,2007,14(6):170-172.
[3]Taylor B,Bil C,Watkins S.Horizon sensing attitude stabilization:A VMC Autopilot[C]//Presented to the 18th International UAV Systems Conference.Bristol,UK,2003.
[4]DI Long,CGAO Hai-yang,CHEN Yang-quan.A two-stage calibration method for low-cost UAV attitude estimation using infrared sensor[J].IEEE.2010(6):137-142.
[5]张明廉.飞行控制系统[M].北京:航空工业出版社,1993.
[6]夏项团,刘学明,王建宇,等.红外地平仪视场保护系统[J].光学精密工程,2007,15(4):512-516.
XIA Xiang-tuan,LIU Xue-ming,WANG Jian-yu, et al.Covering system for vision field of infrared earth sensor[J].Optics and Precision Engineering,2007,15(4):512-516.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
学生天地(2020年3期)2020-08-25
模具制造(2019年10期)2020-01-06
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
解放军健康(2017年5期)2017-08-01
