轻型电动农用运输机械发展现状和趋势
2012-06-10 11:52孙晓
江苏农机化 2012年4期
孙 晓
0 序言
随着农村产业结构的调整,农产品养殖、加工和服务业等蓬勃发展,单次运量少、距离短且频繁的田间农用运输工具需求日益增长,农业生产过程中迫切需要适用于短途少量散货运输,机动性好、污染少、成本低、使用方便的农用运输机械。利用蓄电池作为电源,研制开发轻型电动农用运输机械,是农业生产的迫切需要,也是社会主义新农村建设的需要。
1 国内外电动农用运输机械发展现状
1.1 国外电动农用运输机械发展概况
最早出现的具有代表性的电动力大田作业机械是1912年德国西门子公司生产的36.8 kW乘坐式电动拖拉机,该公司后续又推出2.9 kW手扶式电动拖拉机,该系列产品主要用于耕地作业。1941年瑞典研发了一款可换耕具的多用途电动拖拉机。对我国电动拖拉机影响较大的是前苏联在20世纪三四十年代研发的系列电动拖拉机。以上电动机械均采用电缆供电方式。
20世纪70年代,美国通用电气公司推出了Elec-Trak系列电动拖拉机,采用铅酸蓄电池供电和永磁无刷电机作动力源。由于当时国际能源危机,电动力拖拉机的研究得到追捧,加拿大、英国、意大利和日本等国家相继进行了电动拖拉机的研究,推出的产品功率大多在10 kW左右。后续也有采用燃料电池等新技术的。
1.2 国内电动农用运输机械发展概况
我国早在70年代就研制了一种塑料大棚电动运输车。该车车速40 m/min,载重400 kg,还可以运送粪肥,秧苗,架条等。这种实用型电动运输车很快走向市场,成为广大农民朋友的至爱。随后又出现了一种适用于农村短途散货运输的电动车,它具有生产和使用成本低、节能、安全和机动性好的特点,对环境保护具有良好的效果。
近期,我国又研制了一种混合动力拖拉机,既可用于收割、耕地、播种、施肥、地膜覆盖、浇灌,喷洒农药等,也可用于短途货物运输,还可乘载三人作为交通工具。其特点是体积小,功率在3~12 kW之间,机动灵活,刹车采用汽车的碟式制动,安全可靠,电力启动,操作方便。
针对农村留守人员体质偏弱,田间道路运输难的问题研制的农用手扶电力驱动车,设计了改变轮的着地方式的结构,可3 轮着地在宽路上行驶,或可实现1 轮着地在窄路上行驶。试验结果表明该车能顺利通过120 mm 宽的道路,电力驱动下爬坡度可达13°,人力助动爬坡度可达17°,能够实现无级调速,平路行驶最大速度为2.86 m/s。
2 轻型电动农用运输机械关键技术研究
2.1 轻型电动农用运输机械功耗分析
电动农用运输车用于短途小件散货运输,主要保证货物能方便安全地运达目的地,对车速的要求在其次,这为电动车节省能耗带来有利条件。车辆在水平路面匀速行驶,所需最大功耗P(kW)为
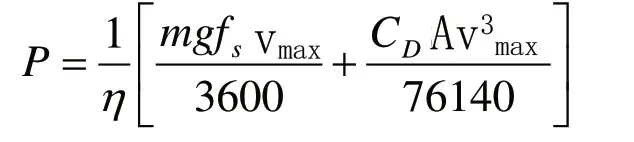
式中η为机械系统和电气系统总效率。单级减速器效率为0.96,链传动机械效率为0.96,电气系统效率根据经验值为0.95,则总效率η为0.875;m为车辆总质量,约为600 kg;g为重力加速度,9.8m/s2;fs为滚动阻力系数,车辆在硬路面上行驶时约为0.0165;vmax为最高车速,确定为20 km/h;CD为空气阻力系数,低速时取0.4;A为车辆正面投影面积,估算为1.5 m2。
可以推断,电动运输车在水平路面上低速行驶时,功耗较小,爬坡时阻力增加很快。如采用串激直流电机,当阻力矩增加时,转速会自动下降,车速变慢,爬坡时总功耗不致增大很多。
2.2 农田环境速度检测
农用运输机械除一般运输作业外,装配一定刀具后,往往具有某些大田作业功能,如翻耕、旋耕、喷施农药和收割等。需要实时采集准确的地速数据作为控制系统的输入量,进行实时产量计算或调整肥料、农药等物料的排放率。此外,作业机械地速信号也是计算作业面积、统计作业效率的依据。因此,速度信号采集和解析对于智能农业装备作业过程监视、农业物料资源的按需投入控制都是至关重要的技术环节。
标杆测速法是一种传统的农田作业机械测速方法,通过计时工具计算作业机械通过固定标杆的时间,再根据作业机械行走速度、行走距离和行驶时间之间的简单数学关系可以测算出作业机械的平均速度。
轮速传感器测速法是利用霍尔或光电效应进行接触式轮速测量的,但由于分辨率低、作业过程轮胎的滑移、轮胎与地表的不同接触状况、轮胎气压变化等各种因素的影响,导致这种测速方法不够精确。
多普勒雷达是利用多普勒原理对运动物体的速度进行连续测量的一种测速系统。国外许多商品化智能农业装备中多采用多普勒雷达测速的方法,相关研究文献也多认为这种测速方法精确度较高。但在农田有作物生长的状况下这种测量方法的累积误差较大。同时,这种测速方法的成本较高。
随着GPS技术的应用推广,近年来有研究人员提出将GPS技术用于农田作业机械的测速。如同定位功能一样,GPS接收机能够对其载体进行测速,一般有原始多普勒观测值测速法、位置差分测速法和载波相位中心差分测速法。研究表明,GPS定位设备是精准农业智能作业系统中的重要组成部分,可以利用GPS的测速功能实时解析接收机输出的NMEA语句(如RMC语句、VTG语句)中包含的速度信号值。
3 结论
综上所述,由于广大农村对电动农机的需求量很大,轻型电动农用运输机械发展较快,但目前国内还没有比较成熟的产品,整个行业还处于起步阶段,今后的发展趋势如下:
(1)探索适合农业环境的驱动系统和车体结构,研究适应农村道路和作业环境的关键技术。进一步降低生产成本,提高电动农用机械的可靠性,使之为农民接受。
(2)建设相应的配套设施,如充电站和维修站,促进电动农用运输机械行业向规模化发展。
(3)国家和有关部门应进一步加大对电动农用运输机械的政策扶持力度,在让农民受益的同时,促进该行业健康、快速地发展。
[1]高辉松.电动拖拉机驱动系统研究[D].南京农业大学,2008.
[2]袁明杰.电动拖拉机[J].科学大众,1955,(9):348-350.
[3]农机系汽车与拖拉机教研组.“电牛-33”和“电牛-55”电动拖拉机[J].东北农学院学报,1960,(3):1-10.
[4]高辉松,朱思洪.电动拖拉机传动系设计理论与方法研究[J].南京农业大学学报,2009,32(1):140-145.
[5]高辉松,朱思洪,吕宝占.电动拖拉机发展及其关键技术[J].拖拉机与农用运输车,2007,(6).
[6]哈尔滨市香坊区幸福公社先锋二队.塑料大棚电动运输车试制成功[J].北方园艺,1978.
[7]陈震邦,周莹.电动农用运输车设计[N].农业机械学报,2005,36(7):153-156.
[8]李从权,范超毅,苏新涛.农用手扶电力驱动车的设计与试验[J].农业工程学报,2011,27(12):36-38.
[9]陈清泉,孙逢春,祝嘉光.现代电动汽车技术[D].北京:北京理工大学出版社,2002.
[10]史智兴.精播机排种性能检测系统及其关键计算的研究[D].北京:中国农业大学,2002.
[11]吴卫玲,宋喜报.多普勒测速雷达测速误差分析[J].计量与测试技术,2000,(1):31-32.
[12]常太华,苏杰,田亮.检测技术与应用[M].北京:中国电力出版社,2003.
[13]何海波,杨元喜,孙中苗.几种GPS测速方法的比较分析[J].测绘学报,2002,31(2):217-221.
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
湖北农机化(2020年4期)2020-07-24
电子制作(2019年15期)2019-08-27
小学生导刊(2017年15期)2017-05-17
小布老虎(2016年12期)2016-12-01
新农业(2016年21期)2016-08-16
水利科技与经济(2016年3期)2016-04-22
专用汽车(2016年9期)2016-03-01
专用汽车(2016年4期)2016-03-01
专用汽车(2015年1期)2015-03-01