昆山市各种资用坐标间坐标转换的设计与实现
2012-07-04 12:23吴国青张晓东
科技视界 2012年7期
吴国青 张晓东
(1.苏州市测绘院有限责任公司 江苏 苏州 215006;2.昆山市规划局 江苏 昆山 215300)
0 引言
为了在昆山市域建立统一的地理空间基准框架,更好地满足昆山市城市规划与经济建设的需要,昆山市规划局建设完成了覆盖昆山市域(面积约927km2)的三等平面控制网。该控制网在苏州市现代测绘基准体系的基础上建立了CGCS2000坐标系、WGS-84大地坐标系、1954年北京坐标系、1980西安坐标系、苏州独立坐标系、昆山独立坐标系这6套坐标系下的成果。为便于测绘成果资料的统一,需要实现这6套坐标系间的坐标相互转换。
1 坐标转换模型的选择
坐标转换的模型常用的主要有四参数模型(又称赫尔默特模型)、七参数模型(一般为布尔莎—沃尔夫模型),前者属二维平面转换方法,包括2个平移量、1个旋转量、1个尺度因子,适用于小区域转换,后者属三维空间转换方法,包括3个平移量、3个旋转量、1个尺度因子,适用于任何区域转换[1]。
本文在综合考虑苏州市区域已采用的坐标转换模型的基础上,决定采用四参数模型。其优点主要有以下几点:一是相比七参数模型,模型方法简单直观、精度稳定可靠,参与解算的变量少,便于编程实现;二是GPS测量联合约束平差也采用此方法;三是转换时不需要提供高程成果[2];四是一定区域范围内高斯投影变形误差是可以忽略的。
四参数法是将原坐标进行平移、旋转、尺度缩放后转换到目标坐标。其坐标转换的数学模型如下:

注:Δx、Δy为平移参数,k 为尺度参数(ppm),α 为旋转角(弧度)。
2 系统功能设计
本系统采用面向对象的分析与设计方法,将系统功能划分成几个功能模块,每个功能模块能单独运行,相互独立又相互依存,有机的结合在一起。其模块功能结构如图1。
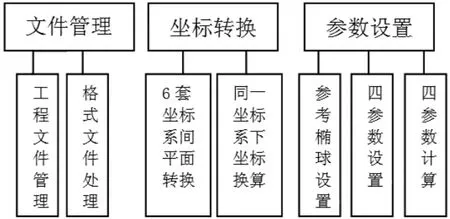
图1 坐标转换软件的系统功能结构
2.1 文件管理模块
2.1.1 工程文件管理主要是新建或打开已建工程文件,可调用已有参数数据或重新输入参数数据。
2.1.2 坐标转换方式采用文件文档方式,用户在活动文档中按规定格式输入坐标数据,点击“转换”按钮后,计算生成目标坐标数据活动文档,并保存下来。
2.1.3 将转换结果进行打印输出。
2.2 坐标转换模块
2.2.1 将同一坐标系(参心坐标系、地心坐标系)下的大地坐标(B,L)与高斯平面直角坐标(x,y)间实现相互换算,即高斯正反算,如图2。同时,可以改变中央子午线进行投影换带计算。计算采用高斯正、反算电算公式,转换成果要求精确到毫米。
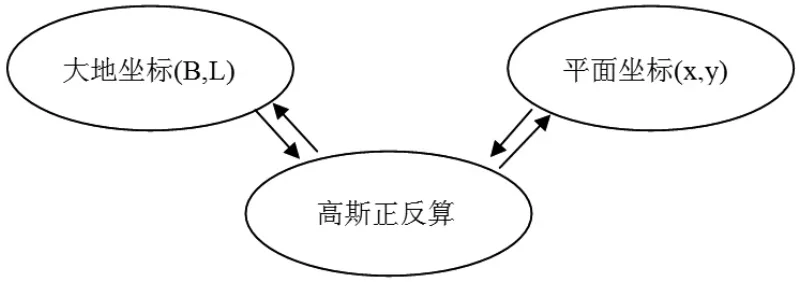
图2 同一坐标系下相互转换
2.2.2 设计实现CGCS2000坐标系、WGS-84大地坐标系、1954年北京坐标系、1980西安坐标系、苏州独立坐标系、昆山独立坐标系间高斯平面坐标成果的相互转换。转换过程是首先将这6套坐标系成果统一投影换算到与昆山独立坐标系同一中央子午线下的高斯平面坐标成果,然后利用已计算好的四参数进行坐标转换,最后是换带计算到目标坐标。不同坐标系下相互转换过程如图3。

图3 不同坐标系下相互转换
2.3 参数设置模块
2.3.1 设置各套坐标系统相关的地球椭球、各自中央子午线,以便进行高斯正反算和换带计算。各套坐标系统相关的地球椭球基本参数见下表1。

表1 坐标系统椭球基本参数
2.3.2 设置输入已有的四参数,将待转换点转换到目标坐标。
2.3.3 采用两两坐标系下的两个以上的平面坐标点,采用四参数模型,通过最小二乘法计算坐标转换参数。分析计算出来的残差,采用人工剔除粗差点,直到满足规定精度要求为止。对合格后的残差进行精度分析,统计单位权中误差、最弱点及最弱点点位中误差等。
为解得转换参数,由①式可知,至少需要两个以上重合点,通过一定数量的重合点,可以采用最小二乘法得到转换参数[3]。将①式变换为以下形式:

其中,c=(1+k/1000000)cosα、d=(1+k/1000000)sinα
当有n≥2个重合点时,可以建立2n个误差方程式,列出的误差方程为

按各点的坐标值等精度定权P为I,则四参数的最小二乘解为 X=(Δx,Δx,c,d)T(变换后的参数),即

将④式所求得参数代入③式求改正数V,利用改正数进行精度评定。
3 系统功能实现
采用Visual C++语言在windows平台上开发了 《苏州市测绘院坐标转换软件》(昆山定制版),实现了坐标数据的批量转换以及利用整体最小二乘法进行四参数计算等主要功能。该软件适用于Windows XPWindows VistaWindows 7操作系统。
3.1 关键技术实现代码如下
3.1.1 根据《控制测量学》中的高斯正反算公式[4],首先,对参考椭球基类进行定义,实现如下:

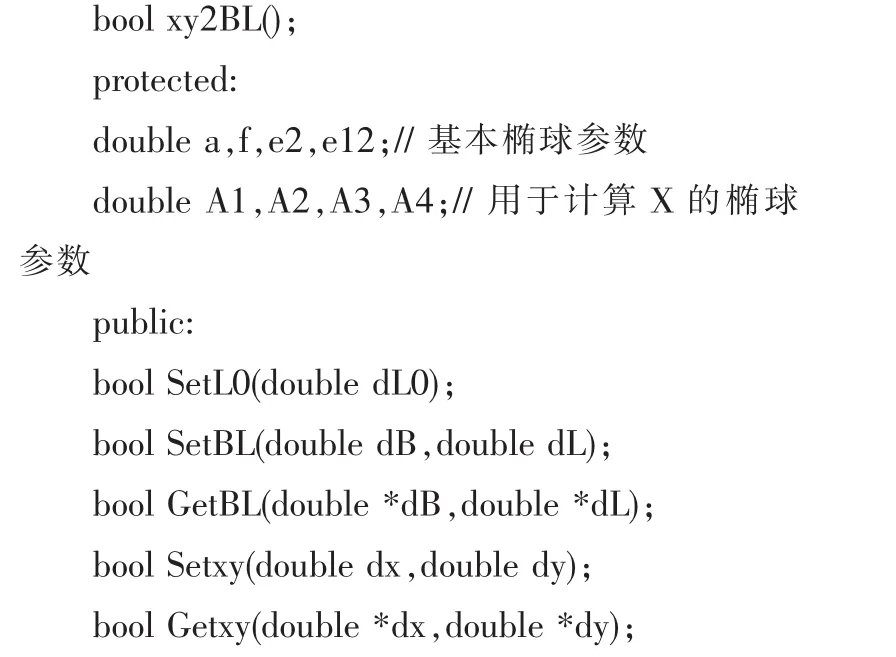
然后将各参考椭球参数类对基类进行继承定义。
3.1.2 四参数计算主要用到了矩阵运算,主要计算过程有以下几步:


3.2 软件运行结果
运用《苏州市测绘院坐标转换软件》(昆山定制版)对各套坐标系下的成果进行坐标转换,将转换成果与已知成果进行了比较。统计结果显示,坐标较差最小为0mm,最大为8.5mm,点位中误差最小为0.9mm,最大为2.1mm。
采用武汉大学《科傻GPS数据处理软件》的坐标转换模块对软件转换方法和转换结果均进行了验算。验算结果显示,两者计算结果一致,转换成果可靠、正确,符合设计要求,可以投入生产使用。
4 结论
本文通过阐述坐标转换模型,采用VC++开发实现了利用重合点进行坐标转换参数的求解和根据转换参数对目标坐标成果进行转换,并对转换结果进行精度评定。同时,采用武汉大学《科傻GPS数据处理软件》的坐标转换模块对软件转换结果进行可靠性、正确性验证。
工程实践表明,一定区域范围内采用四参数模型结合最小二乘计算方法可以实现高精度坐标转换。相比七参数模型,模型方法简单直观、精度稳定可靠,参与解算的变量少,便于编程实现。通过合理的功能设计和可靠的测试检验,软件功能达到了生产使用的目的。
[1]马少君,等.大地坐标转换软件系统的设计与实现[J].铁道勘察,2007.
[2]王解先,邱杨媛.高程误差对七参数转换的影响[J].大地测量与地球动力学,2007,3.
[3]武汉大学测绘学院测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2009,5.
[4]孔祥元,梅是义.控制测量[M].武汉:武汉大学出版社,2006.
[5]Stanley B.Lippman.C++Primer 中文版[M].北京:人民邮电出版社,2006,3.
猜你喜欢
江苏安全生产(2022年3期)2022-04-19
江苏安全生产(2021年11期)2022-01-19
江苏安全生产(2021年10期)2022-01-18
中国教育信息化(2019年22期)2019-12-20
小学生学习指导(低年级)(2019年6期)2019-07-22
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28