
基于VDMS系统的通航船模操纵性率定研究
2012-08-09 01:59乾东岳刘晓平范宁阳刘方舟
长江科学院院报 2012年6期
乾东岳,刘晓平,范宁阳,刘方舟
(长沙理工大学水利工程学院,长沙 410076)
基于VDMS系统的通航船模操纵性率定研究
乾东岳,刘晓平,范宁阳,刘方舟
(长沙理工大学水利工程学院,长沙 410076)
介绍了一种利用VDMS(Velocity Distribution Measuring System)系统配合自编程软件对通航船模进行船模操纵性率定的试验方法。探讨了利用VDMS系统如何有效降低操纵性率定试验的限制条件。通过实际案例验证,该方法可以对船模操纵性做出可靠的评价。
通航试验;通航船模;船模率定;VDMS系统
1 研究背景
船舶模型试验是使用按比例缩小的通航船舶模型和航道水工模型,研究航道通航问题的常用手段。它是一种直观真实反映特定航道边界条件和水流条件对船舶航行影响的方法。通航船模要与原型船舶保持相似是船模试验的首要条件。因此试验前,船舶模型制作过程中要进行相似性验证,以确保船模在几何尺寸、操纵性等方面与原型船相似。在通航试验中利用船模进行通航论证试验时,通航船模使用频繁。通航船模经常需要模拟一些危险航线,极易造成船模碰撞。因此船模试验易引起船模自身的操纵性质的改变。船模操纵性的改变直接影响通航试验结果。为了保证试验结果准确可靠,船模制作及船模使用过程中经常需要对通航船模进行操纵性相似率定。
传统操纵性相似率定试验方法需要有一套自动实时追踪船模轨迹设备。目前用于实时追踪船模轨迹的方法主要有2种:激光扫描(如图1)和数字摄像(如图2)。采用激光扫描的方法追踪船模轨迹,需要利用激光轨迹仪对船模进行定位并在船舶上加装反光棱镜。在船模上加装反光棱镜会对船模本身操纵性有影响。数字摄像法通过摄像头采集船模运动的数字视频数据,利用计算机通过分析不同时刻的数字图形判断船位并追踪船模轨迹。目前只有少数的研究院有能够实时追踪船模轨迹的专用设备。VDMS系统是表面大范围流场实时测量系统。大部分水工模型试验单位都有该系统。本文提出一种利用VDMS系统对通航船模进行操纵性相似的率定方法。

图1 激光轨迹仪[1]Fig.1 Laser trajectory instrum ent[1]

图2 数字摄像法Fig.2 M ethod of tracing ship model by digital camera
2 VDMS系统
VDMS系统(见图3)是运用数字摄像技术与粒子跟踪测速技术(PTV)研制开发的表面流场大范围同步测速与监控系统。在使用该系统之前,需要在模型水面上抛撒示踪粒子。VDMS系统利用摄像头监控示踪粒子的移动并将图像传输给电脑软件。电脑软件比较相邻时刻两幅图像上同一示踪粒子的位移计算出示踪粒子的移动速度。

图3 VDMS系统示意图Fig.3 Schematic diagram of the velocity distribution measuring system
船模试验中通过发挥系统具有非接触式多点测量的技术优势,在船模首尾设置示踪粒子(如图4),配合船模程序即可利用VDMS系统记录船模的航行参数。利用VDMS系统视频监控设备,配合自编程软件可以实现对船模艏向角的监控,克服了操纵性率定试验的一个难点。

图4 示踪粒子在船模上的布置位置Fig.4 Arrangement of tracer particles in the ship m odel
3 操纵性率定试验内容
通航船模相似性率定试验内容包括船模吃水相似,航向稳定性相似,航速及船模操纵性相似。考虑到操纵性相似的成本较高,操纵性相似试验率定内容应根据工程的需要而定。
在大型工程通航论证试验中,操纵性率定试验一般采用“Z”型操纵性率定试验法[2]。通过操纵试验船模直线航行保持航向一段时间后,置舵于某一固定的舵角处航行(如右舷10°)。这一固定舵角可以取为10°,15°,25°等。待船模的艏向角(即艏向偏离)与舵角大小相等后反向操相同的舵角于左舷,并以固定舵角保持航行一段时间直到下次艏向角与舵角相同再次反转舵角。根据船模的航行参数计算,可得表征船模自身固有性质的回旋性指数K和应舵性指数T。通过K,T两个参数即可计算出船模综合操纵性指数P。
为避免尺度效应,需要比较实船与船模的操纵性参数。通过改变船模舵叶面积对船模操纵性加以修正[3]。再次进行操纵性率定试验,直到船模与实船的操纵性参数相等。
4 利用VDMS率定的实现原理
根据操纵性率定试验内容,通过“Z”型操纵性率定试验需要获得船模在实验过程中的航行参数。其中包括操控船模航行的用舵过程、船模航行过程中艏向角的变化、船模航行速度。
该试验的难点在于如何利用通航自航船模试验中常用的流场实时测量系统(VDMS系统),配合自编程序,对船模艏向角与舵角是否相等进行判断。10°“Z”型操纵性试验流程如图5。

图5 “Z”型操纵性试验流程(10°)Fig.5 Flow chart ofmaneuverability test w ith ship model heading in“Z”shape(10°)
如图6所示,船模的二维运动姿态可以由2个控制点A,B确定。假设试验中已经置舵于左舵δ度。需要船模艏向角达到δ度时计算机给出打右舵δ度的指令。
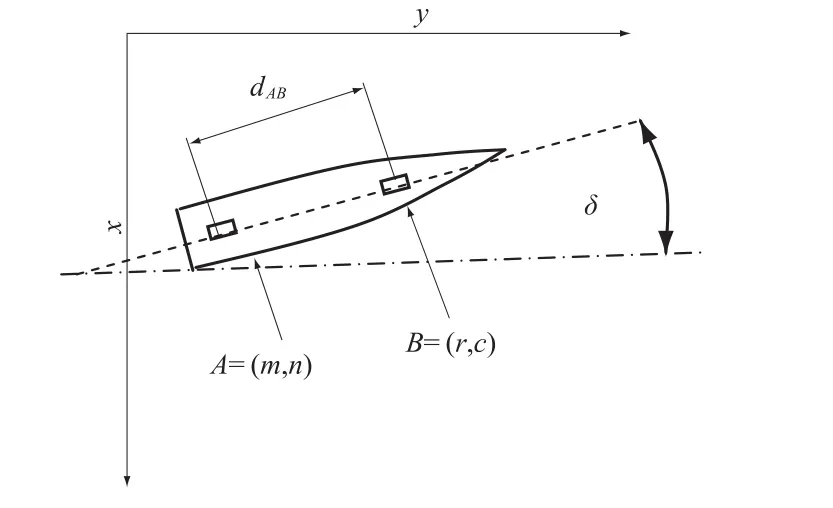
图6 船模计算模型坐标系统示意图Fig.6 Coordinate system of ship model calculation
若已知控制点A(m,n)的坐标,L为2控制点间距离。船模艏向角达到δ度时控制点B的模型二维坐标是唯一可知的(如图6),

式中:Bm(r,c)为B点物理模型坐标向量;Am(m,n)为A点的物理模型坐标向量;Lm(M,N)为方位角δ、模为L的向量。
对应在计算机捕获的视频源内,相对于A点的控制点B的图像坐标应为

式中T为坐标转换矩阵。
考虑到数字图像可能产生几何畸变,因此B点坐标需要进行坐标矫正,经转换后获得B点图像坐标(r,c)。
试验过程中人工控制鼠标指针跟随图像中船尾控制点A移动。程序通过查询指针坐标获得船模控制点A的图像坐标(m,n)。自编程序根据实际船模上2个控制点的空间关系L=dAB及A(m,n)即可计算出艏向角为δ度时船首控制点应在坐标B(r,c)处。一旦某一时刻(r,c)处的像素值I(r,c)等于船模控制点的像素值,即判定此时刻船模艏向角等于δ度。
5 案例分析及测控精度
湘江通航系列船模(λ=100)是为配合长株潭城际铁路湘潭特大桥通航论证模型试验研究制作的。该系列船模比尺与正态水工模型比尺一致。通过使用该方法已对湘江通航系列船模进行了多次操纵性率定试验。船型分别为1 000 t级机动船、4× 1 000 t级驳船船队、2 000 t级机动船(主尺度见表1)、2×2 000 t级驳船船队。

表1 2 000 t级机动船主尺度Table 1 Principal dimensions of 2 000 DW t powerboats
图7为对2 000 t级机动船船模进行“Z”型操纵性率定试验的数据结果。其中梯形线为用舵过程线。由图7可以看出,用舵过程曲线拐点出现在舵角与艏向角相等处。试验中打舵时机符合“Z”型操纵性率定试验要求。
船模操纵性试验参数与实船操纵性参数对比如表2。船模制作阶段,在未对船模进行尺度效应修正的情况下,2 000 t级机动驳船模操纵性较实船稍好。对船模舵面积进行65%修正后,船模操纵性达到规范要求。这与普遍的研究成果保持一致。该方法达到了试验内容的要求。
该方法的定位精度与VDMS系统的精度相关。船模的定位精度可以达到船模速度的0.5%。为了高视频刷新率。因此控舵精度考虑到操舵者的主观因素,控舵精度能够达到0.5 s。经重复试验对比,在相同试验条件下K',T'两参数值的浮动范围为±0.03。试验精度可以满足常规操纵性检测。该方法的测控精度需要更详细的测定。
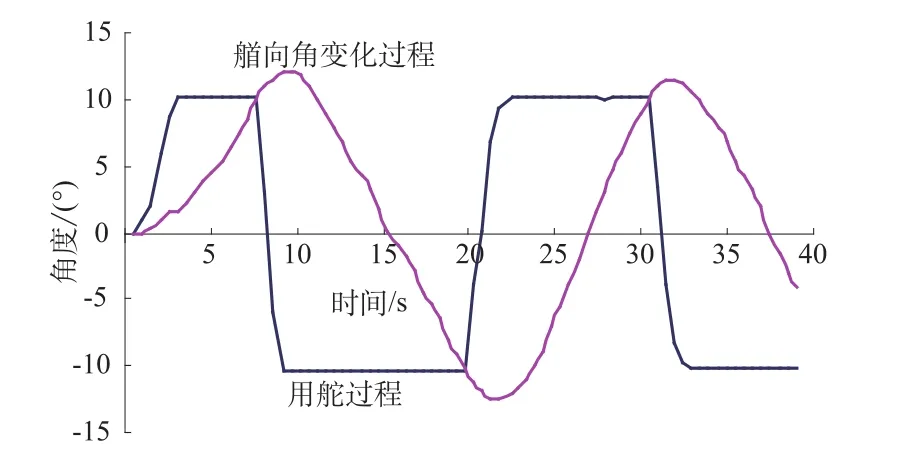
图7 某船型操纵性率定试验用舵过程及艏向角变化过程Fig.7 Curves of rudder control and heading angle variation in themaneuverability calibration for 2 000 DW t powerboat ship model

表2 船模修正前后操纵性试验参数与实船操纵性参数Table 2 M aneuverability parameters of ship model before and after m odel correction and maneuverability parameters of real ship
6 结 语
利用VDMS系统对船模进行操纵性率定是各级科研单位普遍适用的一种率定方法。该方法简单实用,可为通航船模制作及定期校核操纵性提供方便,保证通航试验的准确性。实际案例验证,该方法可以有效降低试验的限制条件。
[1] 徐高钺,胡宝礼,朱亚军,等.激光船模轨迹仪研制[J].中国造船,1986,(3):82-90.(XU Gao-yue,HU Bao-li,ZHU Ya-jun,et al.A Laser Ship Model Track-Meter[J].Shipbuilding of China,1986,(3):82-90.(in Chinese))
[2] 李 杨.船舶操纵性试验方法[J].武汉造船,1994,(2):44-47.(LIYang.Test Method of Ship Maneuverability[J].Wuhan Shipbuilding,1994,(2):44-47.(in Chinese))
[3] 吴秀恒,刘祖源,施生达.船舶操纵性[M].北京:国防工业出版社,2005.(WU Xiu-heng,LIU Zu-yuan,SHISheng-da.Ship Maneuverability[M].Beijing:National Defense Industry Press,2005.(in Chinese) )
(编辑:刘运飞)
Calibration of Ship M odel M aneuverability Based on VDMS
QIAN Dong-yue,LIU Xiao-ping,FAN Ning-yang,LIU Fang-zhou
(School of Hydraulic Engineering,Changsha University of Science&Technology,Changsha 410076,China)
This paper presents amethod for the calibration of navigable ship modelmaneuverability based on VDMS(Velocity Distribution Measuring System)in association with self-programming software.The calibration restrictions could be effectively reduced by VDMS.Ship model case for Xiangjiang river navigability proved that the method could offer reliable evaluation ofmaneuverability.
navigation test;ship model;calibration of ship model;VDMS
TV143
A
1001-5485(2012)06-0022-04
2011-05-03
乾东岳(1987-),男,河南鹤壁人,硕士研究生,主要从事港口、航道及近海工程研究,(电话)18711132753(电子信箱)sepsnow@126.com。
刘晓平(1956-),男,江苏泰州人,教授,主要从事港口、航道及近海工程研究,(电话)0731-82309694(电子信箱)lxplyt@163.com。
猜你喜欢
微型电脑应用(2022年12期)2023-01-30
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
舰船科学技术(2016年1期)2016-02-27
安徽地质(2016年4期)2016-02-27
中国水运(2015年2期)2015-04-23
全球定位系统(2015年4期)2015-02-28
