电机功率因数控制器的控制算法
2012-08-28 06:50张有东
电机与控制应用 2012年7期
张有东
(华北科技学院机电工程学院,河北三河 065201)
0 引言
电机功率因数控制器是以双向晶闸管为调压元件,根据三相异步电机在不同负载时的功率因数变化,控制双向晶闸管的控制角度,调节电机端电压。负载大,功率因数高时,双向晶闸管控制角小,晶闸管输出电压高,负载小,功率因数低时,双向晶闸管控制角大,晶闸管输出电压低,该设备对电机来讲是透明的,它只是根据电机负载情况给出最合理的电压,使电机的有功功率和无功功率之比达到最佳值,从而达到节能的目的。如何找到电机负载变化和控制器输出电压变化之间的对应关系即控制算法,是本文研究的目的。
1 双向晶闸管输出电压变化与晶闸管控制角的关系
晶闸管输入端为三相正弦波电源,现以输入电压380 V、50 Hz动力电为对象说明,见图1。

图1 三相交流电压波形
从三相正弦波图形可看出,U、V、W三相互差120°相位角,考虑电源电压的频率是50 Hz,那么每相一周期的时间为20 ms,一周期为360°,每度对应时间为55.56 μs,因此可将度数换算成相对应的时间来表示。
本例中以U相电压从负变正的瞬间作为时钟基准点,如想得到380 V输出电压,采用单片机控制方式检测基准点到来时刻,单片机立刻对U相晶闸管控制角触发,过 60°(3 333.6 μs)对 W相晶闸管控制角触发,再过60°对V相触发,在负半周,同样经过U、W、V相触发,经过一周期360°后又回到时钟基点,重复运行,就可得到380 V输出电压。如想得到220 V输出电压,当时钟基点到来时 U相晶闸管控制角在延后60°(3 333.6 μs)触发,同理,W 相在 60°后再延迟60°触发,以此类推,就可得到220 V输出电压。380 V到220 V电压变化对应触发角度为0~60°。但真正触发时,因要使电源形成回路,所以一次触发两相,即U、V相同时触发,U、W相同时,V、W 相同时,V、U 相同时,U、W 相同时,V、W相同时触发。
2 电机负载和功率因数角的关系
电机负载是感性负载,因此电流总要滞后电压一个角度,而这个角度就是功率因数角,其大小由电机的负载决定,当电机负载为额定负载时,其功率因数角最小,功率因数最大,达到0.9以上,当电机为空载时,功率因数角最大,功率因数最小,约为0.16。可见,功率因数角变化完全可以反应负载变化,所以,功率因数控制器根据电机负载的变化情况(功率因数的变化情况)来适时调整电机端电压,使电机在轻载情况下也能保持较高的功率因数,降低了无功功率,重载时又能及时增高电机端电压,从而达到节能目的。
3 功率因数控制器的控制算法实现
功率因数角是电流滞后电压的角度,而角度又可转换成时间来表示,因此就可采用晶闸管电压过零检测电路和晶闸管电流过零检测电路,通过单片机计算出两个检测点的时间差,通过换算就可得到功率因数角。
假设三相电是平衡的,以A相电压由负变正的瞬间作为参考点,功率因数角的测量也以A相为准,当时钟参考点到来的时刻开始计算A相晶闸管关断(电流为零)的时间,由上分析,时间可以换算成角度,这个时间就是电压和电流之间的夹角(功率因数角),从而判断出电机负载的大小。
根据功率因数的大小来调整电机端电压的控制算法可以采用两种方式,一种是恒功率因数控制方式,另一种是随动功率因数控制方式,现分别加以说明。
3.1 恒功率因数控制方式
该方式采用一个固定的功率因数做比较点,如采用负载为额定负载53%的功率因数0.8做参考点,当电机软起动完成时,开始计算电机的适时功率因数,当功率因数比参考点功率因数低时,认为是轻载,控制器就以每周期晶闸管控制角升1°的方式降低输出电机端电压,电机端电压降低就引起功率因数升高,当升高到与设定的功率因数相等时,电机端电压稳定。如果电机端电压降到一个设定值(如220 V)时,功率因数仍低于设定值,为保证设备稳定运行,电压被控制在设定值运行。反之,当电机适时功率因数比设定的功率因数高时,认为电机负载加大,控制器就以每周期晶闸管控制角降1°的方式升高输出电机端电压,电压升高功率因数相应降低,当电机适时功率因数与设定的功率因数相等时,电机端电压稳定。程序控制框图见图2。
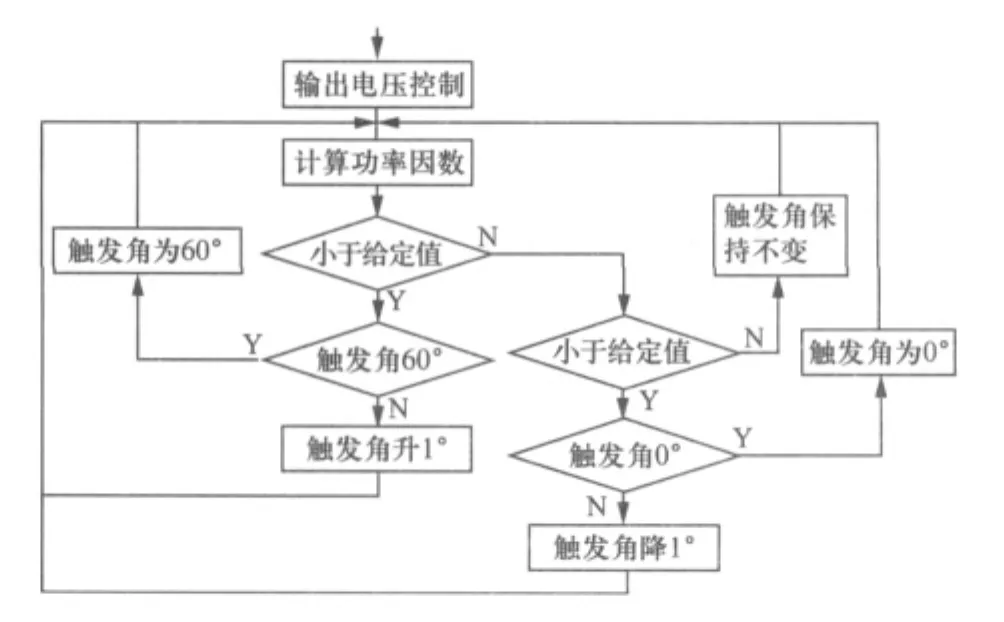
图2 控制算法程序框图
3.2 随动功率因数控制方式
以相邻两次功率因数测量值做比较,如n次和n+1次相减,结果小于一个设定值,则认为电机负载和输出电压相匹配,所以输出电压不变。n次和n+1次相减,当结果大于一个设定值,并为正数,则认为电机负载为重载,可控硅输出电压被控制升高,直到功率因数差小于设定值,输出电压稳定。n次和n+1次相减,当结果大于设定值,并为负数,则认为电机负载为轻载,晶闸管输出电压被控制降低,直到功率因数差小于设定值,输出电压稳定。
4 结语
通过对功率因数控制器控制算法的分析,提出了三相正弦波角度与时间的换算关系,使对角度控制的理论改为对时间进行控制,从而为通过单片机控制方式对功率因数角进行直接控制打下基础。介绍了功率因数控制器的工作原理,给出了控制流程框图,并提出了切实可行的控制方案,为实际制造该产品提供了必要的方式。
[1]王广林,敬淑义,李志杰,等.感应电动机随动功率因数控制法节电控制的研究[J].节能技术,2003(1):5-6.
[2]禹成七,于成军,阎增奎,等.电机功率因数控制器的研究与设计[J].华北电力大学学报,1998(4):36-41.
猜你喜欢
现代信息科技(2022年20期)2022-11-17
湖北农机化(2021年7期)2021-12-07
电源技术(2016年12期)2017-01-10
微特电机(2016年3期)2016-11-29
东北电力大学学报(2015年1期)2015-11-13
自动化仪表(2015年5期)2015-06-15
电气传动(2015年11期)2015-06-10
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09
电子设计工程(2015年12期)2015-02-27