
电流截止负反馈自动调速控制电路设计
2012-09-20 02:29金轶锋
渭南师范学院学报 2012年10期
金轶锋
(渭南师范学院物理与电气工程学院,陕西渭南714000)
直流电动机调速控制系统有很多种,如转速负反馈、电压负反馈、电流正反馈和电动势负反馈系统,这些控制系统其共同点是静特性都比开环系统为硬,如图1中曲线1.当电动机负载突然变得很大时,例如电动机堵转,这将使主回路电流增长到危险的程度.从图1中可以看出,闭环系统静特性1比开环系统静特性2的静差度小,因而闭环系统电动机堵转后电流比开环系统大得多,不仅电动机有损坏的可能,而且电动机与生产机械间传动机构也会受到极大的过载转矩而变形,影响生产机械的精度,严重时使机械部件遭到损坏.因此,一方面在主回路中装设过电流继电器进行保护;另一方面,设计时使静特性适合系统的需求,即在其正常范围内,系统有较硬的静特性如图1中曲线1的ab段称为工作段,而在过载时系统有很软的静特性,如图1中曲线1的bc段.b点称为转折点,c点称为堵转点.转折电流Ib值因不同生产机械而异,堵转电流Ic值的选定主要取决于机械传动电动机容许的过载转矩,我们把这种特性称为挖土机特性.由于上述调速系统中都加快了动态响应速度,所以过渡过程中电流峰值是很大的,对电动机和系统都是不利的[1-2].

图1 挖土机特性
为了解决反馈控制单闭环调速系统起动和堵转时电流过大的问题,采取在系统中设置自动限制电枢电流的环节.根据反馈控制的基本概念,要维持某个物理量基本不变,只要引入该物理的负反馈就可以了.但由于电流负反馈的引入会使系统的静特性变得很软,又不能满足一般调速系统的要求.因此,我们在电路中设置了单独的截流绕组,其目的是电流负反馈的限流作用只在起动和堵转时存在,在正常运行时自动去掉,这样就能使电流自由地随着负载增减[3-4].这种当电流大到一定程度时才起作用的电流负反馈我们称它为电流截止负反馈,电路如图2所示.
1 电流截止负反馈调速系统电路及工作原理
图2中从RV引出反馈电压UV(=αVUG),而UV与给定电压US是反向的,因而构成了电压负反馈环节.在发电机、电动机换向绕组两端并联电阻R1,用以检测主回路电流I,从R1取部分电压作为电流正反馈信号加到扩大机控制绕组CII上,因ICIINCII与ICINCI磁动势方向相同,故控制绕组CII和电流正反馈附加电阻RIa构成了电流正反馈环节[5].由控制绕组CIII和电流负反馈附加电阻Rca组成电流负反馈.由比较电压Ub、比较电压电位器RP3的全电阻Rb及二极管组成截止环节.在正常工作电流范围内,由于换向绕组压降IRC(RC=RGCRMC)小于比较电压Ub,二极管截止,因此电流截止负反馈环节不起作用,此时为电压负反馈电流正反馈系统,其特性如图1中曲线1的ab段.当IRC大于(Ub+UV)时,二极管导通,电流负反馈绕组流过电流ICIII,如图2中虚线所示,其磁动势方向与CI、CII绕组相反,因而限制了主回路电流的增长,形成了下垂特性.电流截止负反馈导通条件为:

图2 具有单独截流绕组调速系统电路图
Ib为主回路转折电流.忽略二极管压降UV时

电流截止负反馈导通后的合成磁动势为:
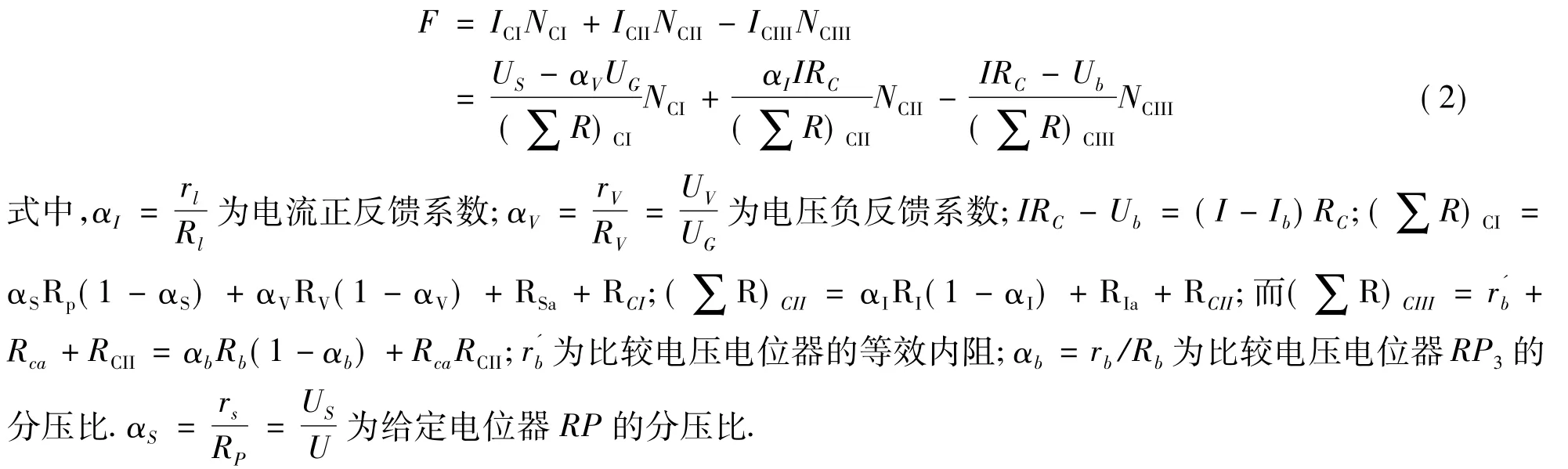
2 电流截止负反馈环节导通后静态框图

图3 具有单独截流绕组的系统静态框图
电压负反馈、电流正反馈静特性方程为

结合图3可得具有单独截流绕组的系统特性方程

(3)、(4)两式相比,电流截止负反馈导通后其理想空载转速及负载转速降均增大了许多,如图1中线所示.由于I<Ib时,电流截止负反馈是不导通的,因而段用虚线表示.
式(4)中,当电动机堵转时即n=0,其堵转电流IL为

根据式(3)及式(6)可得单独截流绕组时系统的转速特性如图4所示.

图4 单独截流绕组系统的转速特性曲线图
3 结论
从单独截流绕组系统的转速特性曲线可得如下结论:
(1)当比较电压一定时(如Ub1),在不同的理想空载转速时(如n01、n02),其转折电流均为Ib1.如果降低比较电压为Ub2,则其转折电流均减为Ib2.
(2)给定电压US越大,其堵转电流越大,但由于US大时,给定电位器内阻亦增大,同时(∑R)CI亦增大,因而使堵转电流增加得少一些.
(4)由于电流负反馈仅在主回路电流I>Ib时能对主回路电流起调节作用,而在I<Ib时,电流负反馈不起作用,因此电流负反馈持续时间仅占整个过渡过程的一小部分,主回路电流维持最大值的时间不长,即缩短了维持最大转矩的时间,延长了起动时间.
[1]顾绳谷.电机及拖动基础[M].北京:机械工业出版社,2010.32-35.
[2]任志锦.电机与电气控制[M].北京:机械工业出版社,2005.125-128.
[3]杨斌文,胡浩.电机应用实用技术[M].北京:电子工业出版社,2010.81-84.
[4]刘翠玲,孙晓荣.电机与电力拖动基础[M].北京:机械工业出版社,2010.54-59.
[5]王巍.实用工业电器与电动机控制[M].北京:科学出版社,2010.135-139.
猜你喜欢
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
四川大学学报(自然科学版)(2021年1期)2021-01-26
甘肃科技(2020年20期)2020-04-13
电子制作(2019年23期)2019-02-23
电子制作(2017年1期)2017-05-17
现代计算机(2017年4期)2017-03-29
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年2期)2016-04-12
