
头眼运动的HMB结构分析
2012-09-26 02:28王长元陈玉龙潘贞贞
电子设计工程 2012年22期
王长元,陈玉龙,潘贞贞
(西安工业大学 陕西 西安 710000)
随着软件工程领域研究的发展,尤其是软件体系结构的快速发展,使利用软件体系结构的方法来分析和设计一些复杂的系统变成可能。基于前庭功能的头眼运动系统是一个较为复杂的仿生系统,它包括复杂的前庭器官系统和眼动系统。以往对前庭系统研究的方法主要集中在医学上的生物学方法和数学建模的方法,文中将从一个全新的角度,用软件工程的方法来分析前庭系统,并设计基于前庭功能的头眼运动系统的HMB体系结构。
1 头眼运动系统的生理学结构分析
生理学上,前庭系统的主要功能可以被描述为:人体在水平方向以任何角度作直线变速运动时,由于耳石膜的惯性,使椭圆囊斑上的毛细胞的纤毛受到牵拉,于是刺激毛细胞,毛细胞兴奋后,产生的神经冲动经前庭系统传入神经中枢,从而产生在这个方向的变速感觉和直线变速反射。头部的位置变化时,就会引起耳石膜与毛细胞在空间的相对位置的变化,从而拉引相应的纤毛产生神经冲动,最终由神经中枢分析神经冲动并提供头部位置的变化信息。
人体绕垂直轴作旋转变速运动时,外半规管内的淋巴液由于压力作用而流动,冲击壶腹嵴,使其终帽向一侧倾斜。终帽的倾斜引起内部毛细胞纤毛弯曲,产生神经冲动。有毛细胞产生的神经冲动经前庭系统传入神经中枢,从而引起绕垂直轴的旋转感觉和旋转变速运动反射。与外半规管类似,其它两对半规管可接受和它们所处平面相一致的旋转变速运动刺激。最终,前庭神经中枢产生的神经冲动来支配眼动运动子系统的运动。
根据前庭系统的生理学描述,可以用建立模型的方法表示前庭系统中各个器官的功能以及它们之间的协作机理。前庭系统的生理学结构如图1所示。
图1显示前庭系统主要由6大功能模块构成,它们分别是:头部相对运动子模块、头部水平运动子模块、头部旋转运动子模块、前庭神经中枢、眼动系统和神经冲动。每一个模块完成上述生理学中所论述的相应功能。
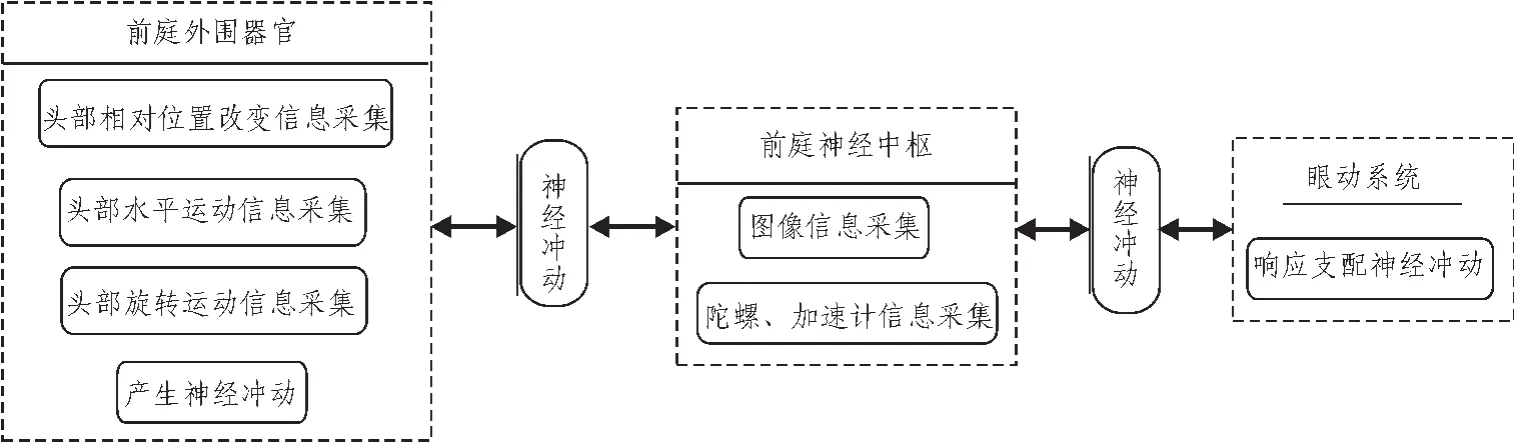
图1 头眼运动系统生理学功能结构Fig.1 Physiological structure diagram of the head and eyes movement system
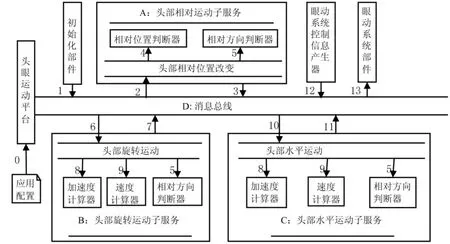
图2 头眼运动系统模Fig.2 Model diagram of the Head eye movement system
2 头眼运动系统的HMB模型设计
在对前庭系统的物理视图进行分析后,可以用软件工程的方法设计软件体系结构。所设计的基于前庭功能的头眼运动系统结构模型如图2所示。
本模型主要从层次消息总线的角度用构件来描述基于前庭功能的头眼运动系统。
主要思想:按照“高内聚低耦合”的设计思想,将每个具有独立功能的模块设计成一个单独的功能构件,然后用一条消息总线把各个功能模块连接起来,每一个独立的功能模块完成一个功能相对独立的功能。消息总线上传输着由各个功能模块发出的不同信息,每个模块只响应适合自己处理的信息,然后把处理的结果发送到消息总线上,由下一个需要处理的功能模块来响应属于自己模块处理的信息并进行处理,再将处理的结果发送到消息总线上,直到受控部件响应并做出响应的响应行为。
模型中各个模块的具体功能如下:
系统管理模块:该模块的主要功能是从全局的角度对整个系统进行实时的控制和管理,以达到稳定运行的目的。例如,当该模块监听到总线上长时间没有消息指令传输时,该模块应该做出相应的调整以保证整个系统的稳定。
初始化部件:主要完成整个系统的初始化工作。
受控系统信息产生器:响应采集信息模块发送的信息并产生对“支配部件”支配的信息。系统启动后首先响应“初始化部件”发来的初始化信息,然后,时刻监听总线上模块A、B和C发出的信息,并且立即进行处理,然后把处理的结果通过消息总线发送给“受控部件”。
受控部件:时刻监听总线,响应“受控系统信息产生器”发出的信息做出相应的行为。
A:头部相对运动子服务:主要响应头部位置的变化并向消息总线上发送头部相对位置的信息。
相对位置判断器:给出此刻头部位置相对于上一刻位置的变化信息。
相对方向判断器:给出此刻头部位置相对于上一刻方向的变化信息
B:头部旋转运动子服务:主要响应头部旋转运动并向消息总线上发送头部旋转运动的信息(例如,加速度和速度)。
加速度计算器:计算头部旋转的加速度。
速度计算器:计算头部旋转的速度。
相对方向判断器:给出相对于上一时刻的方向。
C:头部水平运动子服务:主要响应头部水平运动并向消息总线上发送头部水平运动的信息。
D:消息总线:消息总线的作用是把各个功能模块连接在一起。各个功能模块响应总线上适合自己处理的消息,然后将处理的结果最终再次发到消息总线上。
对图2中小标号(1~13)的解释:
0 :系统读取配置文件
1 :初始化系统
2 :系统调用“头部相对位置运动服务”模块
3 :“头部相对位置运动服务”模块向总线发送服务
4 :“相对位置判断器”向消息支线发送头部的相对位置信息
5 :“相对方向判断器”向消息支线发送头部的相对方向信息
6 :系统调用“头部旋转运动子服务”模块
7 :“头部相旋转运动子服务”模块向总线发送服务信息
8 :调用“加速度计算器”计算加速度信息
9 :调用“速度计算器”计算速度信息
10:系统调用“头部水平运动子服务”模块
11 :“头部水平运动子服务”模块向总线发送服务信息
12 :“眼动系统控制信息产生器” 处理过程 ‘3’,‘7’,‘11’所发送的信息,并向总线发 送处理后的支配信息
13 :“眼动系统部件”响应支配信息
3 HMB在头眼运动测量系统中的应用
基于层次消息总线的一体化头眼运动测量系统结构主要由以下复合构件构成:头盔、下位计算机系统、上位测控计算机系统3部分组成。
其中,复合构件头部测量系统(头盔):包括构件惯性测量单元、两路高速相机,主要完成飞行员、驾驶员的头部运动姿态、眼动图像的数据采集功能;复合构件下位计算机系统:完成将采集到的数据重新打包,并采用无线传输方式将数据传送至上位测试计算机;复合构件上位测控计算机:完成数据分析处理功能;构件初始化部件:完成系统的初始化功能,包括系统运行时状态的初始化。头眼运动测量系统HMB结构如图3所示。
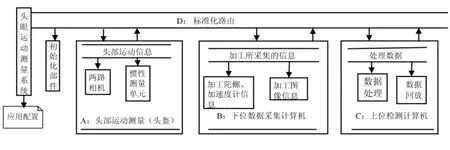
图3 头眼运动测量系统的HMB结构Fig.3 HMB Structure designed diagram of the Head eye movement system
3.1 复合构件头部测量系统
本部分主要由左、右两路摄像机和姿态仪组成,完成头部运动原始数据的采集,包括:左摄像机和右摄像机以及姿态仪的数据采集。摄像机:为系统的视频信息采集部分,下位机系统可以通过摄像机的SN在配置文件中获得计算机连接的方向,并当摄像机处于正常状态时进行被测试人员眼部的运动信息;姿态仪:为下位机系统提供被测试人员头部运动的三轴加速度、三向旋转角度。通过姿态仪可以获得本测试人员的三轴加速度和四元数。
3.2 复合构件下位数据采集计算机
该部分负责对采集到的原始数据进行加工,包括:视频数据、加速度数据、四元数,然后将这些数据打包并发送至上位检测计算机。通过这种通用连接方法,上位机可以连接至下位机,获取下位机传来的信息。另外,本部分还负责对系统的状态进行检测,包括:两路摄像机的工作状态、姿态仪的状态、网络联通性状态以及电池电量状态检测。
3.3 复合构件上位检测计算机
本部分实时同步接收人体的头动和眼动数据,实时绘制头动速度曲线与眼动位置曲线,进行头动与眼动关系的分析。主要有4个模块:1)系统自检系统:检查上位机系统各模块的功能工作状态;2)数据接收模块:通过宽带无线路由器接收下位计算机发送的数据;3)数据分析处理模块:根据接收到的数据帧,实时分析被测者的严冬曲线、头动曲线和相关性,计算相关参数;4)数据保存模块:对已采集的原始头动、原始眼动信号存储、回放、冻结、打印等。
3.4 构件初始化部件
系统启动时,对系统部件进行初始化,包括对两路摄像机和姿态仪的初始化,以及在系统工作时完成功能性的状态定时初始化等功能。
3.5 标准化消息路由
该模块为系统提供消息总线的功能,采集数据的复合构件负责把采集的数据信息发送到该模块上,负责分析处理数据的复合子构件负责从该模块获取数据。
4 结 论
上面所设计的HMB结构已经应用于头眼运动测量系统中。基于这种结构的头眼运动测量系统是该领域一种全新的研究方法。这种头眼运动测量装置已经废弃了传统运动模拟平台的束缚,采用一种新的头眼实时测量解决方案,测试所采集到的前庭功能的数据,分析头眼运动的刺激和反应之间的关系。该设备具有传播方式的多样性,检测设备高采样率和调节设备的多自由度,从而提高了检测的精度,并降低了对刺激装置的要求,并可扩展到其他需要的平台。在眼球运动的测量方面,国内主要是进行二维的眼动测量,但国外的研究进展一直到三维测量,而本设备对眼球运动数据的测量可以完成三维眼动测量。在这个领域里,进一步提高了测量眼球运动的准确性,也显示了该系统结构的设计的合理性。
[1]孙久荣,黄亿华,牟晓东.前庭代偿:研究中枢神经系统可塑性的一个理想模型[J].生理科学进展,1998,29(3):209-213.
SUN Jiu-rong,HUANG Yi-hua,MOU Xiao-dong.Vestibular compensation:Study on plasticity of central nervous system an ideal model[J].Progress in Physiological Sciences,1998,29 (3):209-213.
[2]牛丽静.前庭核向脑干和脊髓心血管调节区的投射[D].石家庄:河北师范大学,2004.
[3]Grant J.W., Best W.A., Otolith organ mechanics:lumped parameter model and dynamic response[J].Avia Space Envoron,1987(58):970-976.
[4]Grant J.W., Best W.A., Mechanics of the otolith organ-Dynamic response, Ann.Biomed Eng.,1986(14):241-256.
[5]Grant J.W., Best W.A, Lonigro R.Governing Equations of Motion for the Otolith Organs and Their Response to a Step Change in Velocity of the Skull[J].J.Biomench.Eng,1984(106):302-308.
[6]苏海军,徐明瑜.耳石系统的动力学响应[J].山东大学学报:自然科学版,2002(37):39-44.
SU Hai-jun,XU Ming-yu.The dynamic response of otolith organs[J].Journal of Shandong University:Natural Science Editio,2002(1):39-44.
[7]苏海军.前庭系统数学模型及分数阶微积分的应用[D].济南:山东大学,2002.
[8]徐明瑜,谭文长.半规管内流体动力学问题[J].中国科学(A辑),2000(30):272-280.
XU Ming-yu,TAN Wen-chang.Theproblemsoffluiddynamics in semicircular canal[J].Science in China:Series A,2000(30):272-280.
[9]张世琨,王立福,杨芙清.基于层次消息总线的软件体系结构风格[J].中国科学:E辑,2002(6):293-400.
ZHANG Shi-kun,WANG Li-fu,YANG Fu-qing. On hierarchical message bus based software architecture style[J].Science in China:series E,2002(6):293-400.
[10]张友生.软件体系结构[M].北京:清华大学出版社,2006.
猜你喜欢
基层中医药(2022年3期)2022-07-22
中老年保健(2021年4期)2021-08-22
基层中医药(2021年1期)2021-07-22
军事文摘(2020年22期)2021-01-04
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
天津医科大学学报(2015年2期)2015-12-22
医学研究杂志(2015年11期)2015-06-10
医学研究杂志(2015年5期)2015-06-10
空间控制技术与应用(2015年2期)2015-06-05
