
用于光电仪器和相关测量的自混合干涉技术( 特邀)
2012-10-30 08:48DONATISilvano禹延光
中国光学 2012年2期
DONATI Silvano ,王 昭,禹延光
(1.意大利帕维亚大学 电子系,伦巴第大区 帕维亚27100,意大利;2.西安交通大学 机械工程学院,陕西 西安710049;3.澳大利亚伍伦贡大学 电子、计算机及通讯工程学院,新南威尔士州 伍伦贡2522,澳大利亚)
1 引 言
激光自混合干涉( SMI) 技术起源于人们对激光器中反馈光的研究。由于激光器发出的光被外部物体反射或散射后回到激光器谐振器内时,会与内部腔场相互作用,从而对激光器本身的性能产生严重影响。因此,人们起初研究的目的是要消除这些影响。不过,随着研究的深入,人们发现了反馈光对激光器功率的影响规律,这一规律形成了现在的SMI 理论,并将其应用于位移、距离、振动、速度等不同参数的测量。由于SMI 仪器与传统的干涉仪具有同等的灵敏度,但其结构简单紧凑、易于集成并且成本低、适用范围宽,所以在很多场合都可以取代传统干涉仪。
2 SMI 干涉仪工作原理
SMI 干涉仪的结构不同于其它采用激光作光源的光学干涉仪,它是利用腔场与目标散射返回场之间的相互作用,即耦合现象的一种特殊情况来形成单光束自混合干涉的。由于干涉信号携有被照射物体的运动信息,故可用于振动、位移等参数的测量。从激光器的早期研究开始,人们就很关注耦合现象的研究。1972 年,诺贝尔奖获得者H.Lamb Jr.和M.B.Spencer 两人发表了关于耦合现象的论文,论文对三反射镜激光器( 或自注入式)[1]和互注入式( 双光源) 情况[2]进行了描述,这对后期耦合系统的发展起到了重要作用。
基于耦合方式的系统可分为互耦合系统( 两个激光器相互改变它们各自的出射状态) 和自耦合系统( 一个激光器接受从远距离目标返回的信号) 。耦合强度分为弱耦合和强耦合,在激光腔中产生的扰动从10-3下降到10-8为弱耦合( SMI情况) ;现存的场功率上升到10-2为强耦合( 即产生混沌) 。在自耦合弱区,振荡场的振幅调制( AM) 和频率调制( FM) 随变量( 或调制量) 正比于返回场,即正比于被扰动激光器的外部光学相移2ks( k 为波矢,s为距离) 的正弦或余弦,SMI 的应用正是利用了这一机理。自混合调制可以用旋转矢量叠加的结果来解释[3],如图1 所示。
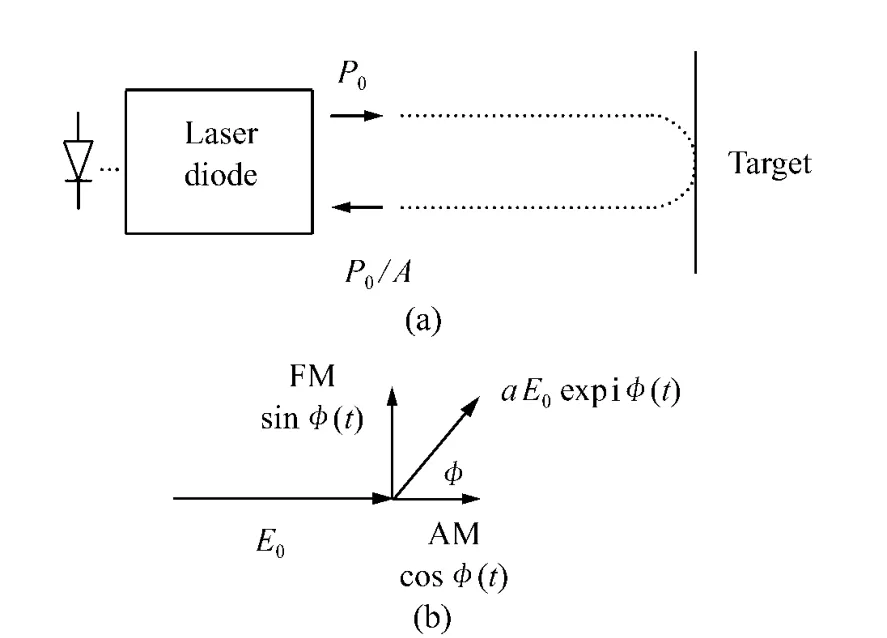
图1 自混合干涉仪的基本结构( a) 和旋转矢量叠加模型( b) ,模型解释了AM 和FM 的产生原理,它们分别是同相( cosφ) 和正交的( sinφ) 分量,φ=2ks 是到远距离目标并返回光路的光学相移Fig. 1 Basic scheme of a self-mixing interferometer( a) . The rotating-vector addition model( b)explains how AM and FM modulations are generated,respectively by the in-phase( cosφ)the in-quadrature( sinφ) components. φ=2ks is the optical phase shift of path to the remote target and back
设E0是未受干扰的腔场,则aE0expi2ks为从目标返回的场,a是传输过程衰减因子,2ks是相位延迟。由通讯理论可知,旋转矢量的叠加将产生一个由调制项同相位分量驱动的一个AM(aE0cos2ks) 和由正交分量驱动的FM(aE0sin2ks) 。
在应用方面,AM 很容易从被光电二极管探测到的强度( 或功率) 中得到,而FM 由于取决于光学频率却较难以获得。在互耦合弱区还可发现,在两个互相作用的激光器中都有AM 和FM,而且调制项为振幅和频差之比[4]。这时耦合系统可被看作是特殊的相干探测接收器,也被称作注入式探测器[5]。因为远距离反射镜可看作是反馈源,所以基于自耦合的方案就有多种,如后反馈、诱导调制、注入和自混合等干涉仪。
实现SMI 的原理较为简单。通常使用的探测器即为光电二极管,它在激光二极管制作过程中被封装在激光器内部。在前输出端仅仅需要一个准直光学元件,再用一个衰减器调整返回信号的强度。通常目标无需是反射型的,因为从普通散射面返回的信号已足够大了。
在腔内自混合过程中,出射功率可表示为[6]:

式中:P0是未受干扰时的功率,φ =2ks是到目标并返回的距离s对应的光学相位,k =2π/λ 是波矢,mA是振幅调制因子,其表达式[6-7]为:mA=A-1/2[c/2s( γ -1/τ],γ 是增益系数,τ 是腔的衰减时间。注意A-1/2的关系清楚地表明SMI 过程取决于场而不是功率,所以它是一个相干过程[5]。式(1) 中的F取决于耦合强度,是以2ks为变量、以2π 为周期的函数。所以功率波形的变化可反映目标距离的变化量2kΔs=2π,或Δs=λ/2,即与通常的干涉仪相同的半波长。在非常弱的耦合强度下,F是φ 的余弦函数;在弱或中耦合强度下,F的余弦波形发生了变形,如图2 所示。为描述耦合强度,引入一个注入参数C[8]为:

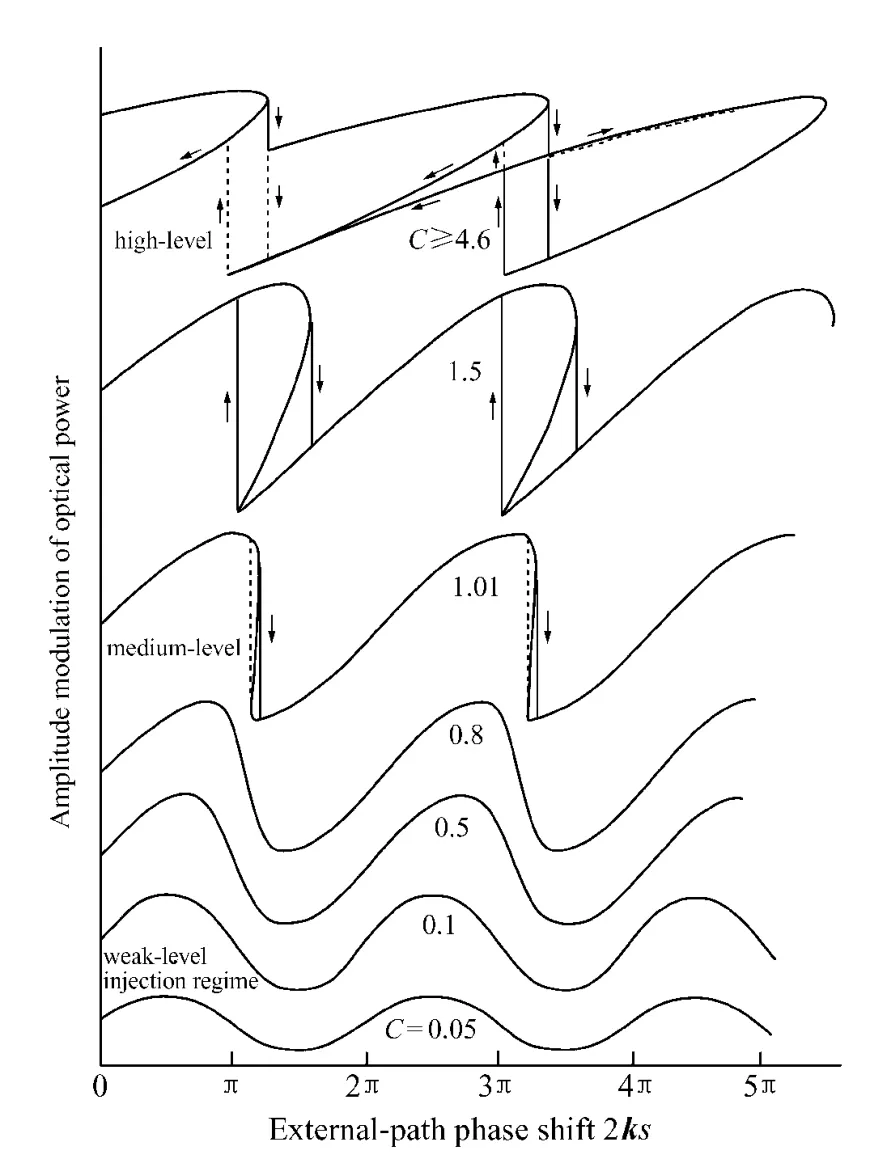
图2 SMI 从弱到中耦合的波形:至C≈0.05 时,波形类似于光学相移的余弦函数;增加C,波形逐渐变形,直到C=1,此时在尾缘出现突变现象,标志着ECM(外腔模式) 开始。上述机制通常可应用于双通道干涉仪,LDV(C≪1),条纹计数SMI(1 <C<4.6),以及α 因子、线宽测量及角度测量。在C值较大时,SMI 波形首次展现出每个2ks 周期超过一个突变点,接着突变很快就变成了古怪的形式,从而进入了振荡的混沌机制,这对SMI 来说是不利的,但是却可用于密码术Fig.2 SMI waveforms for weak to moderate level of coupling: up to C≈0.05 the waveform is much a cosine function of the optical phase shift,then at increasing C it becomes progressively distorted until at C=1 a switching appears in the trailing edge,marking the onset of ECM( external cavity mode) . Regimes shown are those used in: twochannel interferometer,LDV( C ≪1) ,fringecounting SMI( 1 <C <4.6) ,and also alfa-factor,line width measurement,and angle measurements. At still larger values of C,the SMI waveform first displays more than one switching per period of 2ks,and then multiple switching soon becoming erratic,entering the chaos regime of oscillations,no more convenient for SMI but useful for cryptography
关于SMI 信号的波形F( φ) ,在弱耦合C<0.01 情况下,F开始是在常用干涉仪中出现的余弦波,但是随着C的增加,波形逐渐被破坏,后缘比前缘陡( 见图2)[3],直到临界条件C=1,此时在尾缘出现了突变现象。对应于中等耦合强度时,SMI 每个周期出现一个突变,这是SMI 工作时的首选条件。继续增加C,当C=4.6 时,在一个2ks周期内出现两个突变。进一步增加耦合会增加突变数,直到波形变得很古怪,因为在多突变点中选择哪一个严格地取决于系统的初始条件—即系统进入多稳态和混沌机制。应用于干涉测量时,应使C<4.6,但是通常在C≪1 的情况下,信号处理比较容易。
信号采集可采用图1 所示方式,即在激光器的后输出端进行,制造商往往在那里提供一个具有倾斜表面的光电二极管( PD) 用于监测输出功率。即便没有后面的PD,也可以在输出光束前面放置一个PD,甚至可在目标位置探测SMI 信号。如果用PD 不可行,尽管这时的S/N 没有后输出或前输出时的好,但是还可读取叠加在静止偏置电压上的( 小) 电压[9-10]作为SMI 信号。
分析自混合现象的第一种方法为利用简单的旋转矢量叠加模型( 见图1) ,将AM 和FM 解释为正弦和余弦形式的SMI 信号。第二种方法为三反射镜模型,它是将目标看成是激光器的第三个反射镜,应用振荡的稳态巴克豪森条件,得到等式:v=v0+(c/4πLn1)a·sin4π(v/c)s,当C<1时,只有一个解,1 <C<4.6 时有3 个解,其中一个解不稳定( 中心) ,另外两个解稳定[6],对应于波形的一个突变以及ECM( 外腔模式) 的开始,在C=1 时被激活,并且整个模数增加约为2C/π。上述等式可变为标准的Adler 频率等式[4,6,11],即:

式中:τ=2L/c是外部时间延迟,C是耦合因子,α是线宽增强因子。式( 3) 也可从Lang-Kobayashi等式中得到。三反射镜模型解释了一些有趣的现象,但是缺乏对现象物理条件的详细解释,例如材料( 半导体) 和激光二极管的相互影响。第三种方法最为复杂,它基于电场振幅和相位慢变近似的Lamb 方程,并用状态集合的叠加等式( 如Lang和Kobayashi( L-K) 等式) 加以修正[12],最后可得到[3,6]:
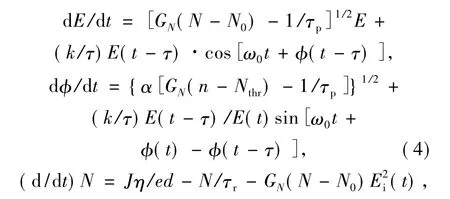
式中( 给出一般值) :τ=2s/C=30 ns/m 是往返光程延迟;GN=8.1 ×10-13m3/s 是模式增益;k是场耦合与振荡模之比;N为载粒子密度( m-3) ;Nthr=2.5 ×1024m-3是所在阈值时的载粒子密度;N0=1.2 ×1024m-3是反转时的载粒子密度; τp=2 ps是腔内光子寿命,τr=5 ns 是载粒子寿命,α=3 ~6 是线宽增强因子; ω0=k/c是未受扰动的频率;J是泵浦电流密度和在厚度为d的激活层内部的量子效率。L-K 等式是各点独立的等式,描述了受激材料,它与基于三反射镜的系统等式有很大的不同,通过被k相乘的耦合项以及延迟项E(t-τ) 和φ(t-τ) 完成了对激光振荡的描述。利用L-K 方程可得到其它方法所能得到的所有结论,包括Adler 的等式( 见式( 3) ) ,而且还揭示了AM/FM 调制,F( φ) 的波形,突变时的C因子[3],初始的双稳态和多稳态,谱线变宽或变窄,规律到混沌[13]等现象。与实验比较,L-K 等式给出了较为精确的弱水平下的SMI 现象和高水平时与混沌有关的动力学模型。唯一的偏离是比预期的振荡线宽要宽,为了解释这一现象,在式( 4)的第二行引入了一个线宽增强因子α[14]。
3 SMI 干涉仪的特点
与其他传统干涉仪比较,SMI 具有如下优势:
(1) 光学零件数量少( 在激光器外部不需其它光学元件) ;
(2) 光路自排列( SMI 可在激光点到达之处完成测量) ;
(3) 不需要空间、波长或杂散光的滤波器( 激光腔作为滤波器) ;
(4) 工作在普通的散射目标面( SMI 允许强损失) ;
(5) 信号可在光束的任何位置,包括目标的边缘( 这是SMI 独有的特征) ;
(6) 分辨率为条纹计数的λ/2,用模拟处理方法可达到亚波长量级( 可达到探测的量子噪音限) ;
(7) 带宽可达几百千赫兹或兆赫兹。
当然,SMI 也存在一些不足:
(1) 在基本光路中没有参考臂;
(2) 由于采用F-P 激光二极管,波长精度和稳定性差;
(3) 结构灵活性差;
(4) 工作在散射目标表面,SMI 信号受到散斑图统计特性的影响,会引起振幅衰减以及相位误差。
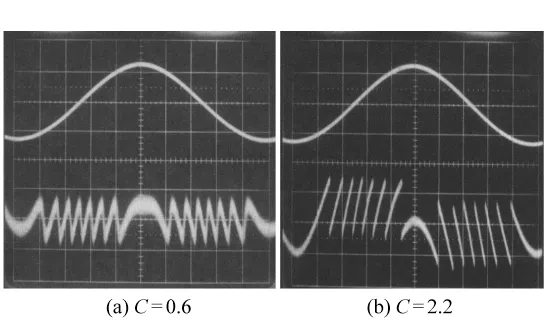
图3 在目标信号s( t) 为正弦驱动信号时( 上曲线)得到的SMI 实验信号( 下曲线) 。左: 在C =0.6 时cos2ks 波形有点变坏,下降的半周期比上升的快;右:在C =2.2 时,在下降的半周期发生突变。波长为850 nm,时间尺度为2 ms/div。光电二极管探测的波形中目标每移动λ/2 会有个突变。目标后退时( 上曲线) 突变是负走向( 下曲线) ,目标前进时是正走向。( 见文献[6])Fig.3 Experimental signals of the SMI( lower traces) ,obtained in response to sinusoidal drive s( t) of the target( upper traces) . Left: at C=0.6,the 2ks waveform is slightly distorted,with falling semi-periods somewhat faster than the rising ones; right: at C =2.2,a switching occurs in the fall semi-period. Wavelength is 850 nm,time scale: 2 ms/div. Note that the waveform detected by the photodiode has switching every λ/2 displacement of the target. The switching is negative going( lower trace) when the target is receding( upper trace) and is positive-going when the target is approaching.( Ref.[6])
一般地,从SMI 的示意图( 见图1) 和波形( 见图3) ,可能会想到一个简单的处理方案就可以适合所有的应用,但事实并非如此。首先,通过数波的峰-峰Ip-p来计算周期数,它对应目标距离Δs的λ/2 变化,从而实现Iph(t) 的数字处理。其次可以对Iph(t) 进行模拟处理,因为观察得到小的ΔIph变化对应于小的距离Δs变化,这很容易从Δs=( λ/2) ΔIph/IP-P等式中发现。最小的ΔIph比IP-P小得多,从图3 中的迹线可知,平均噪音σIPh与Iph相关,用模拟处理方法可使分辨率变得更好,很容易达到纳米量级,在实验中达到了20 ~50 pm ( 量子噪音限甚至更小,可达到到目前为止,动态范围较大时,数字处理结果比较满意。数λ/2 条纹显示,测量的动态范围仅受分配到计数器中的十进制数的限制,所以很容易达到λ/2 的105~106倍的步长,相应地对于IP-P波形,对应的模拟量是λ/2。当采用数字处理方法,在测量范围较大( 一般为几米) 并要求达到亚波长分辨率情况时,习惯上将SMI 归为位移测量仪器[15]。另一方面,用模拟方法处理的SMI,可能对分析小振幅的( 如1 ~100 的峰-峰) 周期运动更有利,在分析机械振动或机械疲劳时[5],可将它归为振动测量仪器。有些作者把测振仪当作测速计,这显然不是一个很好的选择,因著名的激光多普勒或LDV 仪器[3]用于流场分析和风力测定[3]更有优越性。当然,SMI 也可被设计成实现测速计功能的仪器。
4 SMI 干涉仪的应用
在最近的20 年里,报道有关SMI 的应用主要包括:
(1) 位移、振动、速度、角度测量;
(2) 线宽、α 因子等激光参数的测量;
(3) 厚度、折射率、粗糙度、机械共振、力/应力迟滞等物理量的测量;
(4) 远距离回波探测、返回损耗、共焦显微镜传感器、生物运动性等传感测量。
4.1 位移测量
在机械量计量中应用的仪器是基于稳频He-Ne 激光器的“激光干涉仪”[5]。当使用角锥棱镜作为反光器件时,在几米的位移范围内,仪器分辨率可达0.1 μm,所对应的动态范围>107[15]。用于位移测量的SMI 能以散射模式工作、可测量未经处理的表面、可替代角锥棱镜、且费用低廉、容易操作。普通的激光干涉仪需要两路信号,即cos2ks(t) 和sin2ks(t) ,以便能够确切地获得正弦/余弦函数的相位并正确地提取s(t) 。与之相比,SMI 最大的优势是在C>1 区域很容易得到位移增量信号。典型的SMI 结构信号波形如图3 所示,可以看出外部距离s(t) 每变化λ/2,波形信号突变一次。目标向着光源前进( 后退) 时发生正( 负) 走向的突变表示计数时位移信号s( 加或减)的符号[6,16]。图4 为用于位移测量的SMI 结构。
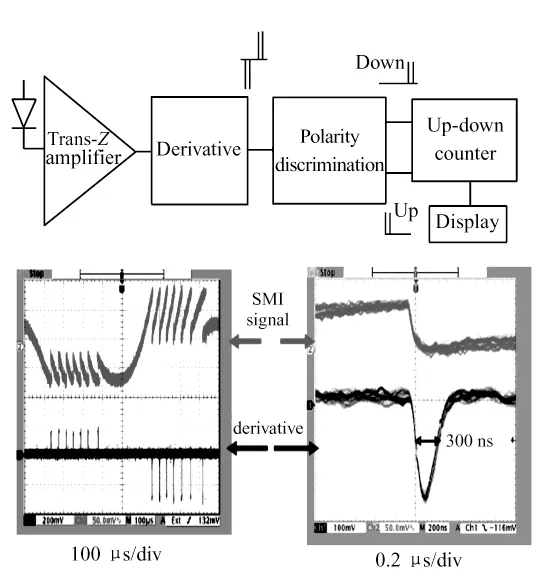
图4 分辨率为λ/2 的位移测量SMI 示意图,其对应波形的C >1: 光电二极管的信号通过跨阻放大器、时间微分、脉冲整形存储到十进制计数器的上/下输入中,用一个乘法器输出十进制米单位的最终结果。典型的分辨率是0. 5 μm,目标最大速度在脉宽300 ns 时为1.2 m/sFig.4 Schematic of an SMI for measuring displacement with λ/2-resolution from the waveforms with C >1: the photodiode signal is passed through a trans-impedance op-amp, time-differentiated and pulses rectified and sorted to the Up/Down input of a decimal counter. A multiplier( not shown) is used to bring the accumulated counting to metric decimal on the display. Typical resolution is 0. 5 μm,and maximum speed of the target,with a pulse width of 300 ns,is about 1.2 m/s
光电二极管的输出经过跨阻放大器放大后,将IPh转换成电压,然后对时间进行微分,以提取脉冲的突变点,判断脉冲的( + / -) ,将它们送到分开的输出端。采用十进制加减脉冲[6],计数内容是从计数器复位时刻t=0 开始到当前时间为止目标的累计位移s(t) ,单位是λ/2。为了以十进制、m 单位读出,需有一个以λ/2 为计数单位的乘法器。在脉宽为300 ns 时,目标最大速度为1.2 m/s。
采用850 nm GaAlAs 激光二极管,其分辨率约为0.5 μm,可满足大部分机床定位和测量要求[15]。而且,如果维持微分器处理时间常数足够短( τ =300 ns) ,就可得到每秒约为1/τ 脉冲( 即3 ×106) ,计数脉冲最大目标速度是v= λ/2τ≈1.2 m/s。即使对一个散射不好的目标,SMI 信号也能被探测到,且能够处理的距离可达到2 m[6,16]。
在考虑测量的准确度和精密度时,波长稳定性是首要考虑的问题。在实验室环境下,仔细控制偏置电流和温度可使工作时的稳定性达到10-6。散斑图的统计特性会影响SMI 信号的振幅并引入相位误差[3]。为了评估SMI 的固有特性,这里采用角锥立方棱镜作为目标物进行了一组位移(s=65 cm) 的重复性测量。
如图5 所示,相对误差δs/s为- 95 ×10-6/℃。采用热电冷却器稳定激光器芯片温度后,数据回到零线附件,在4 h 内采样60 组数据,误差范围约为2 ×10-6[16]。
实际上,在应用SMI 测量位移时,F-P 激光器分辨率达不到10-6水平,因为在开启后激光器变热从而出现波长的模式跳跃( 每个能达到Δλ =1 nm) ,同时对λ 产生迟滞现象[3]。这时可采用分布反馈( DFB) 激光器替代F-P 激光器,这样光源在实验室条件下可长期保持( 大于1 年) 10-6的精确度[16-17]。在SMI 结构中可采用一般的散射体代替角锥棱镜,而对基于He-Ne 激光器的干涉仪来说是不允许的[3]。
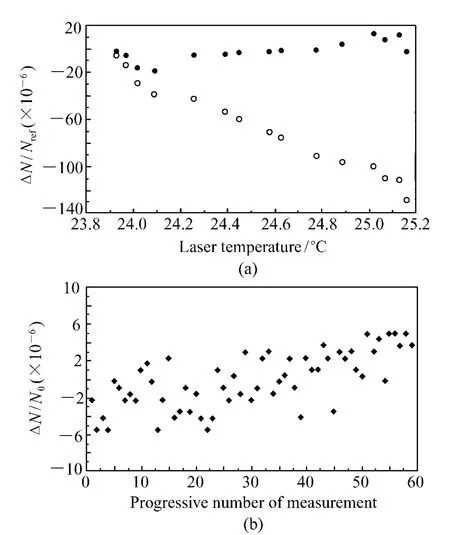
图5 测量65 cm 位移时给出的激光二极管温度函数( ( a) 中的空心圆) 。温度稳定后,数据在零点附近( ( a) 中的实心圆) 。在4 h 内测量了60 个点,误差约为± 2 × 10 -6( b) ( 见文献[16])Fig.5 Results of measuring a 65 cm displacement exhibit a roll-off as a function of diode laser temperature( open circles of ( a) ) . After temperature is stabilized,data return around zero( full dots of ( a) ) . The spread over a N=60 sample of measurements lasting 4 hours is about ±2 ×10 -6( b) ( see Ref.[16])
通常散斑图影响返回激光腔场的振幅和相位[18],分析结果显示[3],相位误差相对较小,在s=1 m时仅仅有几个波长的起伏,但振幅变化较严重,由此会引起信号丢失,从而丢失与λ/2 有关的计数,应该加以抑制。这种状况通常在测量目标沿被测路径的位移s(t) 对应的散斑比较“暗”的情况下发生。利用统计特性可减轻散斑变暗:暗散斑周围可能有其它较亮的散斑。如果让投射到目标上的光点发生一个小的偏离,偏离量大到足够改变散斑采样,但小到测量距离不变,就可能避免“暗”散斑现象。为了追踪亮散斑,可用装有物镜的两个PZT 压电激励器驱动,使之沿X-Y轴运动,用伺服电路形成闭环,将探测信号反馈给压电器以确保SMI 信号达到最大[19]。该技术被称为亮散斑追踪( BST) ,图6 给出了一个使用该技术的例子。
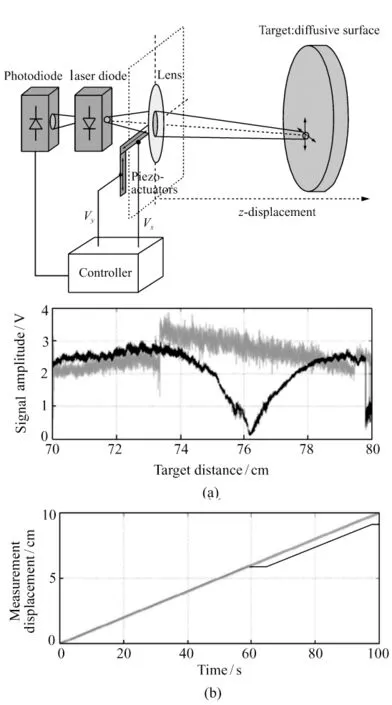
图6 ( a) BST 技术—亮散斑追踪: 物镜在一对PZT驱动控制下可沿X 和Y 方向移动以跟踪区域强度最大值。( b) 证明BST 控制的实验结果,避免了暗散斑在s =76 cm 处的计数丢失( 见文献[19])Fig.6 In the technique called Bright Speckle Tracking( BST) ,the objective lens is moved slightly along the X and Y axes by a pair of PZT actuators so as to track the local maximum of intensity scattered by the diffuser back into the laser( a) .In an experiment demonstrating BST control,a dark speckle affecting a counting loss at s =76 cm is avoided and the corresponding error is removed( b) .( see Ref.[19])
在一般工作条件下,“暗”散斑通常出现在s为74 ~78 cm 之间,这时的振幅较小,计数易丢失。打开BST 电路,避免76 cm 处的下降点,正确计数。这证明了BST 控制避免了暗散斑在s=76 cm处的计数丢失。在图6 中还可以看到,s=73.5 处有一个陡峭的上升,在此处系统跳到了附近亮的散斑处。严格地讲,用BST 可以减少但不能够完全消除散斑变暗的可能性。然而,如果让k 从0.01 下降到约为10-6[19],则SMI-BST 仪器可应用于非散射体,可作为变化范围为m 量级、分辨率为λ/2 的便携式仪器[20]。
4.2 振动测量
如果被测量的位移量是小振幅的周期运动且频率范围从声波到MHz,则以λ/2 步长计数过于粗糙,这时一般采用模拟方法处理信号s(t) 。起始时模拟形式受动态范围限制,因为运算放大电路可支持的信号范围从毫伏( 偏置限) 到数十伏,或有104的动态范围,所以比具有106~107动态范围的数字处理位移干涉仪要少102~103量级。但是用模拟信号处理方法,对小位移可以大幅提升灵敏度,不受半波长限制,仅受到探测信号噪音的限制,该限制也被称作噪音等效位移( NED) ,可容易地从探测信号Iph0(1 +cosφ) 中获得[5],其中φ=2ks,在半条纹点( φ =π/2) 处具有最大相位灵敏度,即为( ΔIph/Iph0)2=( Δφ)2。回顾一下与探测电流有关的肖特噪音表达式,即( ΔIph)2=2elph0B[5],式中B是测量的带宽,很容易得到:〈( Δφ)2〉=2eB/Iph0= SNR-1,这里SNR 是幅值( 如光电流) 测量的信噪比。利用φ2kΔs和k =2π/λ 可得到[5]:

由式( 5) 可知[5]: 对应μA 的探测电流和MHz 的带宽可探测最小NED 达到nm 量级,对mA 和kHz 甚至可达pm 量级,这实际上已经达到或接近极限水平,为解决在处理电路中普遍存在的大量大扰动和干涉源提供了手段。还有一些因素限制了干涉仪可测的最小信号,如相干、散斑和热动态变化,但是经过优化设计后SMI 可以忽略这些因素[5]。
目前通过模拟信号实现小信号的振动测量主要有两种方法:(1) 在半条纹处读出,以便利用干涉仪读出相位-电流关系的线性变换。为了达到这一目的,设置干涉仪的静态工作点在余弦幅值之间,即φ =π/2 附近,使φ =π/2 +2ks,对于小位移则有: ΔIph= -Iph0Δφ = -Iph02kΔs,例如Δs和SMI 输出信号ΔIph的线性关系可直接从探测到的电流改变量ΔIph读出Δs=Δφ/2k。信号响应的线性范围被余弦状函数限制在λ/2,对于早期的传统干涉仪[5]由于有参考臂很容易实现该技术,这时半条纹条件可表达为cos( φmess- φref) ≈0。为了实现这一条件,调节参考光程使得φref=Δφmess+π/2,从而对Δφmess有cos( φmess-φref) =-sinΔφmess≈-Δφmess。(2) 波前重构技术。通过0 <2ks<2π 时 的 转 换 关 系Iph=Iph0[1 +F(2ks) ) ],并利用展开算法对N2π <2ks<(N+1)2π 时的情况进行扩展重构,可以从测量数据Iph(t) 中得到s(t)[21-22]。该方法可在较大周期数N时重构s(t) ,仅受限于SMI 的参数C和α 准确度,见式(3) 和式( 4) 。实际上,文献中给出的N值在30 ~100 之间,或对应的最大振幅s在50 ~150 μm( 峰-峰) 之间,同时对小s残余计算误差为5 ~10 nm[21],远远大于方法(1) 中达到的噪音限。4.2.1 小振幅振动
在SMI 中没有参考通道可以调节条纹信号的象限,但是可以利用半导体激光器波长依赖于偏置电流这一关系开发一个控制环,并将其工作点设在干涉仪的半条纹处[23]。
在中反馈区(C>1) 可以利用条纹的慢半周期,在这里工作区域近似为线性( 见图7( a) ) 。为了动态设置半条纹的工作点,须考虑光电二极管互阻放大器输出端的探测信号以及它的幅度变化。设Vref为半条纹电压,为了锁住信号起伏的中间静态点,将Vref作为差分运算放大器( 图7 中的增益A 模块) 的参考输入,在另一输入端接收探测信号Vop-amp。然后,放大差分并转化为电流( 图7 中的Gm模块) ,并反馈到激光二极管。电流Ibias引起波长变化Δλ =αλΔIbias,从而导致波数变化Δk= -kΔλ/λ,关闭反馈环并伺服相位2ks信号。目标移动产生相位2kΔs,反馈环和波长变化的相互作用得到一等值并反向的相位-2sΔk。经历反馈环后,振动信号2kΔs在差分放大器的输出端输出Vout( 图7( b) ) ,这是由大的环增益造成的。Vref和运算放大器输出Vop-amp之间很小的压差是产生Vout所需的条件,而且它还可使αλGmVout偏置电流满足零相位条件,即2kΔs=0。所以从运算放大器输出ΔVout获得的振动信号为:
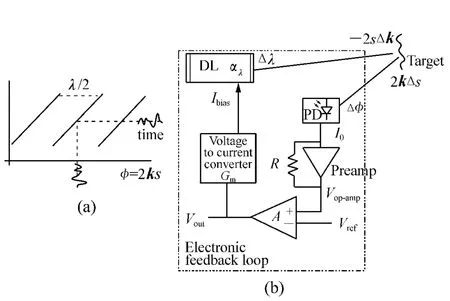
图7 小振幅振动仪中的线性处理:为了锁住信号起伏的中间静态点,用半波电压Vred 作为差分放大器预放大信号Vop-amp的参考信号( a) 。将输出转换为电流并提供给激光二极管。由于目标移动造成了相位变化2kΔs,电子反馈环作用使得波长发生变化,从而给出一等量的反相位-2sΔk。在差分放大器A 的输出端得到振动信号2kΔs( b) ( 见文献[23])Fig.7 Linear processing in a small-amplitude vibrometer: to lock the quiescent point at the middle of the signal swing( a) ,the half-fringe voltage level Vref is used as the reference of the difference amplifier receiving the preamp signal Vop-amp.Output is then converted to current and feeds the laser diode. To a phase variation -2sΔk due to target motion,the electronic feedback loop reacts with a wavelength change giving an equal and opposite phase -2sΔk. The vibration signal 2kΔs is then found at the output Vout of the difference amplifier A( b) . ( see Ref.[23])

该结果不受光电探测器信号Iph的幅值以及其波动( 包括目标后散射因子和散斑图变暗) 的影响。唯一的条件是环增益Gloop足够大。由图7,环增益Gloop=RAαλGm(s/λ2) σP,其中σP0=Iph0是光电探测平均电流,σ 是光电二极管的谱密度。在一般的测振仪[23]结构中,可让环增益增大至Gloop≈500 ~1 000,与非反馈条件相比,在闭环中残余的非理想情况可被与环增益相等的因子削弱,特别是散斑图变暗程度被因子500 ~1 000 降低且不再对测量有影响。反馈环的另一个作用是因子Gloop可提高线性和动态范围[23]。基于控制理论,动态范围极限仅是在环中引入的误差,所以小信号振动计不局限于振幅≤半条纹( 或>λ/2)的情况。随着信号的增加并趋于超过该条纹,反馈环将它拉回来,留下残余量仅为1/Gloop。动态范围为Gloopλ/2,即200 ~500 μm。按照半条纹伺服环概念研发的宽带振动计性能在文献[24]中进行了报道。该原型机最小可探测信号NED=100 pm( 带宽B=1 Hz) ,最大动态范围约为500 μm。带宽/振幅性能关系见图8,同时该图还给出了室外场中振动测量的实例。
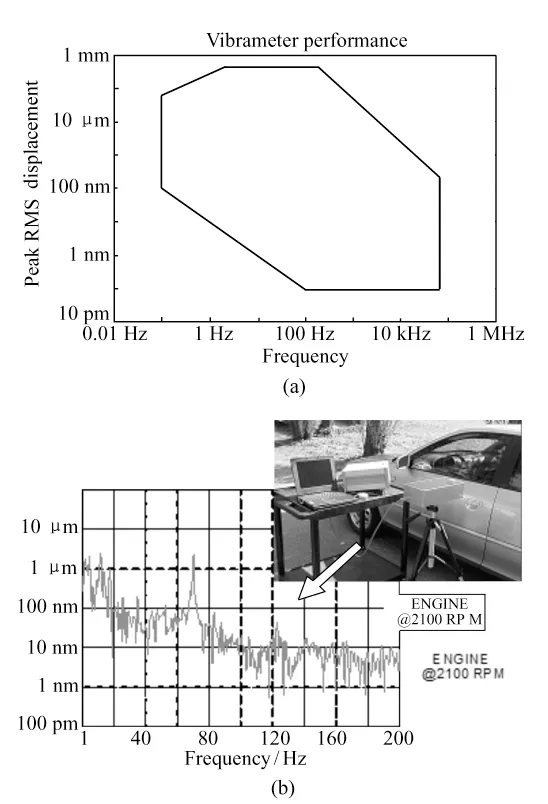
图8 ( a) 锁定半条纹的振动仪性能: 最小位移信号是100 pm( B=1 Hz) ,最大幅值为500 μm,频率为0.1 Hz ~80 kHz( 见文献[23]) ;( b) 现场探测汽车门上小振动的仪器Fig.8 Performance of a half-fringe locked vibrometer( a) : minimum displacement signal is 100 pm( B=1 Hz) and maximum amplitude 500 μm,frequency from 0. 1 Hz to 80 kHz ( see ref.[23]) . The instrument at work detecting small vibrations on the door,as produced by the engine of the car( b)
4.2.2 大振幅振动
如果能从被测波形Iph(t) 或P(t) 中通过对式(1) 进行转换解出相位φ=2ks(t) ,那么从理论上就可得到不受动态测量范围限制的信号s(t) 。完成转换算法分为两部分:对-π <φ <+π,应去除式( 1) 中F函数中的非线性项,当φ 超过2π时,对相位去包裹确定( 2N-1) π <φ <( 2N+1) π的范围。当反馈较弱(C<1) 时,波形是时间对称的,为了从式(1) 中得到明确的解,需要两个信号: φ = 2ks的正弦和余弦信号( 参看4. 2. 3节) 。大量文献[25]论述了应用反余弦函数测量Iph(t) 以及其相位去包裹的方法。当反馈较强(C>1) 时,一个信号就足以完成重构,因为波形中的突变给出了相位去包裹时增量所需要的符号。如S.Merlo[21]首次提出,从式(1) 和式(3) 可得到一个算法,该算法可被用于从实验测量得到的F(t) =ΔP/P0( 或Δph/Iph0) 的波形中,s(t) 可表示为:

对dF(t) /dt·( ds/dt) <0 符号应该取“+”,对dF(t) /dt·( ds/dt) >0 取“-”,F(t) 的每两个零交叉点m增加1[21]。应用式(7) 需要确定参数C和α。如果线宽增强因子不是太小而且有α2≫1,C可由F(t) 波形形状确定[6],通过寻找F增加(trise) 和下降(tfall) 的半周期,可得[6]:

另外,α 因子可由激光二极管类型估算也可按照本文后面所说的方法测量。对一般的法布里-珀罗多量子阱( MQW) 激光二极管,α 在4 ~6间变化,计算时取α =5,对非正弦周期波形s(t)应用式(7) 和式( 8) 给出的重构结果,如图9 所示。2 μm 波形的重构误差<5 nm[21]。
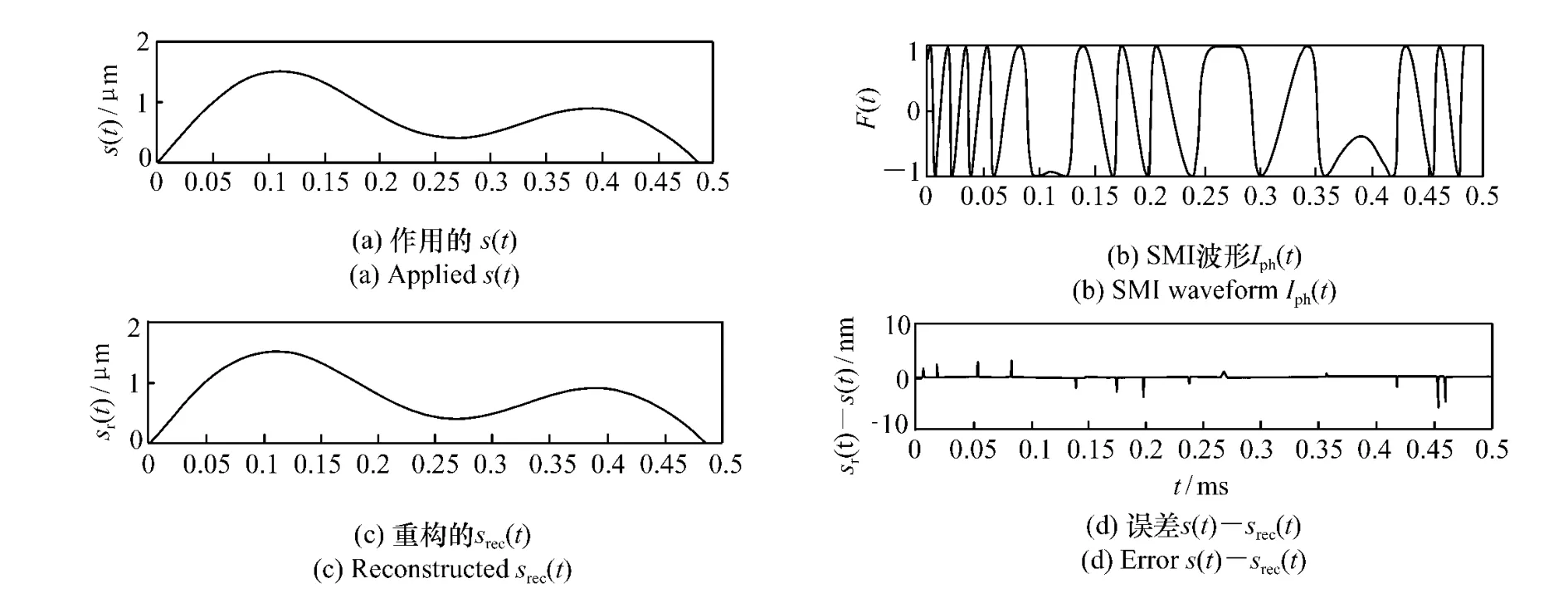
图9 测得的F( t) =ΔIph( t) /Iph0重构s( t) 波形。对于2 μm 峰-峰信号,误差<±2 nm。( 见文献[21])Fig.9 Reconstruction of the s( t) waveform from the measured F( t) =ΔIph( t) /Iph0. For a 2 μm peak-to-peak signal,error keeps <±2 nm. ( see Ref.[21])
当信号振幅较大时可得到类似的结果,即N倍的波长λ: 当N达到10 ~20 时,误差<5 ~10 nm,然而N>100 时,C因子以及α 因子较小的误差就可能导致重构时产生π 相位( 或λ/2 振幅)的误差。
G.Plantier 等人提出了一种更复杂的基于成本函数最小化算法[22],该成本函数描述了测量数据的距离二次方关系,该数据是对参考波形进行理论计算而获得的,参数C和α 可调整。最小化的误差给出了C和α 的最佳估算值,且用波形直接分析法也发现了自洽性估算确保了其准确度。
综上所述,尽管半条纹技术包含了mm 或亚mm 振幅,但上述算法中没有一种可实时重构大幅度( 即到mm 或cm 范围) 的位移。
4.3 正弦/余弦重构
适用于所有干涉仪且对大振幅位移或振动信号能够解决去包裹或重构问题有效的方法是基于对cos2ks和sin2ks两个正交信号的处理。它们是在双通道激光干涉仪[5,7]中所寻求的用于数字或模拟处理的两个信号,也是对C≪1 的SMI 希望能获得的。对于激光二极管SMI,因为是对光学频率的FM 驱动,无法直接操纵电信号,所以无法得到sin2ks信号。但是,如果采用双模工作的激光源,一个模用于SMI,另一个在腔里保持模不变作为解调器操作的区域振荡器,引入电频率的FM 调制,可获得用于重构的sin2ks。
这是早在1977 年证明的自混合干涉仪重构技术[7],也是第一篇报道的SMI 可用于位移重构的文章。为了实现这一目标,采用He-Ne 塞曼激光器[5],其激活介质被加在介质上的磁场分为两部分。S.Zhang 及其同事采用过该方法[26-27]。在横向塞曼效应下[5],He-Ne 激光器支持具有线性正交偏振的双模,其频差为20 ~100 kHz[5,7]。将其中一个模式到达目标( 见图10( b) ) 而另一个到达后面的光电探测器,并用于将SMI 信号从光频转换到电频。光电探测器输出端的信号表现出振幅的小起伏AM,FM 为正弦颤动。AM 和FM解调后,可获得两个信号S=sin2ks和C=cos2ks,如图10( c) 所示[5,7]。对S和C的时间求导,可得到S'=2kvcos2ks和C'= -2kvsin2ks,v=ds/dt是s的时间导数。C和S与其导数交叉相乘并相减,得到:
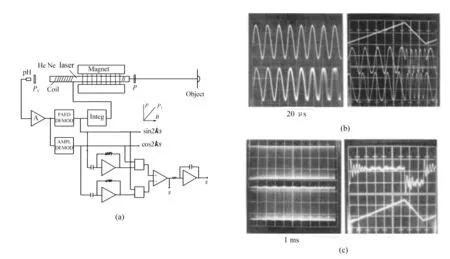
图10 ( a) 用cos/sin 信号重构位移:( b) 利用具有横向塞曼效应的He-Ne 激光器产生一对正交的、线性偏振模,在目标输出端放置一个偏振片,选择出一个模用于自混合效应,而另一模在腔内不受影响。在后反射镜位置放置一45°偏振片使得两模输出( 一个载有SMI 信号,另一个为固定参考信号) 到光电探测器。( c) 振幅和频率解调后给出cos2ks 和sin2ks 信号,然后交叉相乘信号和其导数得到v,再对v 积分得到s( 见文献[7]) 。Fig.10 ( a) Reconstruction of displacement with the cos/sin signals:( b) a HeNe laser with transverse Zeeman effect is used to create a pair of orthogonal,linear-polarized modes. A polarizer at the target output selects one mode for selfmixing effect,while the other is kept unaffected in the cavity. A 45° oriented polarizer at rear mirror allows beating of the two modes ( one carrying the SMI signal,the other a fixed reference) on the photo-detector. ( c) Amplitude and frequency demodulation reveals the 2ks and 2ks signals. The cross product of signals and their derivatives are made to free out v and then integrate v to obtain s( see Ref.[7])

然后对v积分得到s。
v和s的重构波形与电驱动波形相比有小的波动,但这仅仅是由实验中所用的换能器( 扩音器) 的频率响应引起的,即是对换能器的测量。
重构计算没有动态范围的上限,因此可对任意振幅进行计算,如果选择替代模拟电路,则用PC 中的ADC 获取信号可使处理过程数字化。因为很难得到两个较为稳定且容易分离的频差很小的正交模,因此用激光二极管不能复制同一结构。
4.4 速度测量
根据是否测量v的纵向分量,即平行于波矢量k( 或平行于视线) 的v∥k,或横向矢量v⊥k( 垂直于波矢k 或视线) ,主要有两种形式的SMI 测速计。
在第一种情况下,相位2ks表示为φ =2k·s。速度v=ds/dt,通过φ 对时间求导,有( d/dt)2k·s=2k·v=dφ/dt=ω。这表明SMI 输出信号Iph已经包括了由波失k 即k·v=vk确定的沿视线方向的速度分量,速度vk可由信号Iph中的频率f=ω/2π 而测得,尺度因子为2k/2π =2/λ,vk有时被称作多普勒信号,但是它没有比干涉相移更多的信息。所以,纵向速度的测量仅仅是SMI 工作原理的一个副产品,Scalise 等人[28]讨论了几个变量。如果忽略横向分量,运动过程中目标点不变,因而散斑统计特性不影响测量。
在考虑横向速度分量时,令2k·v=0,此时不应该观察到SMI 信号的任何输出,然而还是观察到了一些与速度有关的现象,因为当缺失干涉信号时,散斑统计特性影响激光器中的其它常数场,产生随机被调制的输出电流Iph。Iph的频率常数可通过特别标定[29-30]手段与速度分量v⊥k产生相关关系,然而基于这一原理的速度计有时会由于目标表面结构而出现不稳定现象。
4.5 距离测量
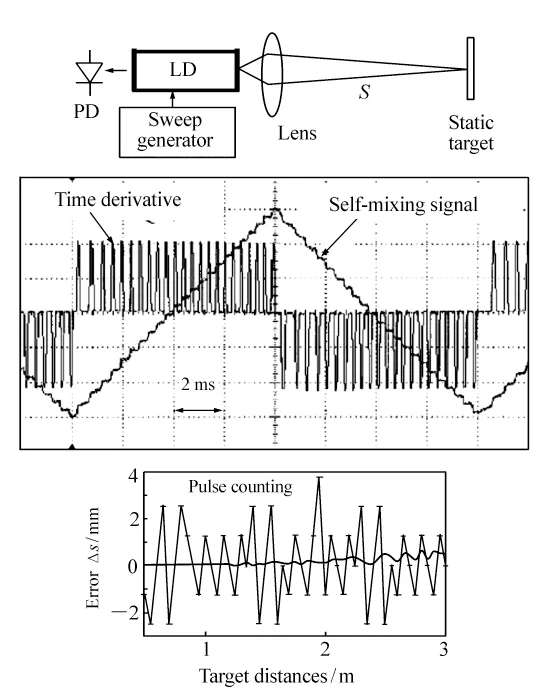
图11 SMI 距离测量: 在激光二极管上用偏置电流扫描,用一个三角波调制波长,相位φ =2ks表现出N 个2π 周期变化( 对应波形上的小起伏) 。SMI 信号以时间微分和周期N 计数,距离单位尺度是λ2/2kΔλ,所以距离s =Nλ2/2kΔλ。下图是s =1 ~3 m 的距离测量( 见文献[3])Fig.11 Distance measurement with a SMI: by a bias current sweep applied to the laser diode,wavelength is modulated with a triangular waveform,and phase φ =2ks exhibits a number N of 2π-periods variations( the small ripple on waveform) . The SMI signal is time-differentiated and the periods N counted. Unit of scale distance is λ2/2kΔλ and accordingly distance is s=Nλ2/2kΔλ. Diagram at bottom is the spread of measurements on a s =1.3 m distance( see Ref.[3])
与其它干涉仪相同,SMI 基于相位检测原理,所以需要乘以2π( 或乘以λ) 来计量相位增量。实际上,SMI 测量的不是到目标的距离,而是以小步长( 即λ/2) 为增量的累积位移,为此需要从z=0移动到z=s后计量步长的增量。这不同于干涉仪相位传感仪器进行的距离测量。为了克服这一限制,Gouaux 等人[31]提出了利用偏置电流Ibias引起波长变化的关系从相位φ=2ks( 模为2π) 中求出s。为此,对偏置电流进行线扫描,得到幅值ΔIbias( 从最小的I0到最大I0+ΔIbias) ,如图11 所示,如果αλ=dλ/dI是电流波长系数,波长变化为Δλ=αλΔIb,相应的波数k 变化为Δk =(2π/λ2)Δλ[29,31-33]。对静态目标,SMI 的光学相移变量由Δφ=2s( 2π/λ2) Δλ 给出,其中s为常数。除以2π,得到SMI 干涉信号的周期数N=2sΔλ/λ2。从这一等式中解得s为:

所以,相对增量而言,绝对距离测量是通过扫描偏置电流得到Δλ,然后计量在扫描时间内的自混合信号的周期数N,再利用式( 9)[31-32]求出距离s。
考虑其分辨率,由式( 9) 所示,距离测量单位是因子乘以N,或dunit=λ2/2Δλ。所以要得到较高的分辨率就需要较大的Δλ。通常利用的法布里-泊罗激光二极管因受到模式跳跃问题的限制,则有Δλ=0.1 nm( λ =0.85 μm) ,对应地有dunit=3.6 mm。图11 描述了由SMI 距离测量仪器得到的波形,并给出在1 ~3 m 距离重复性测量的例子[3]。
4.6 角度测量
早期的SMI 很容易探测从远距离目标反射镜反射回的信号,因为从周围收集到的麦克风产生的振动就能够提供足够大的SMI 信号[34]。该设备被改进后[35],成为角度测量仪器,其性能可与光学自准直仪相比。该SMI 装置( 见图12) 利用PZT 驱动移动台,移动台上安装激光二极管的物镜以调整瞄准角α,并得到响应信号Iph。
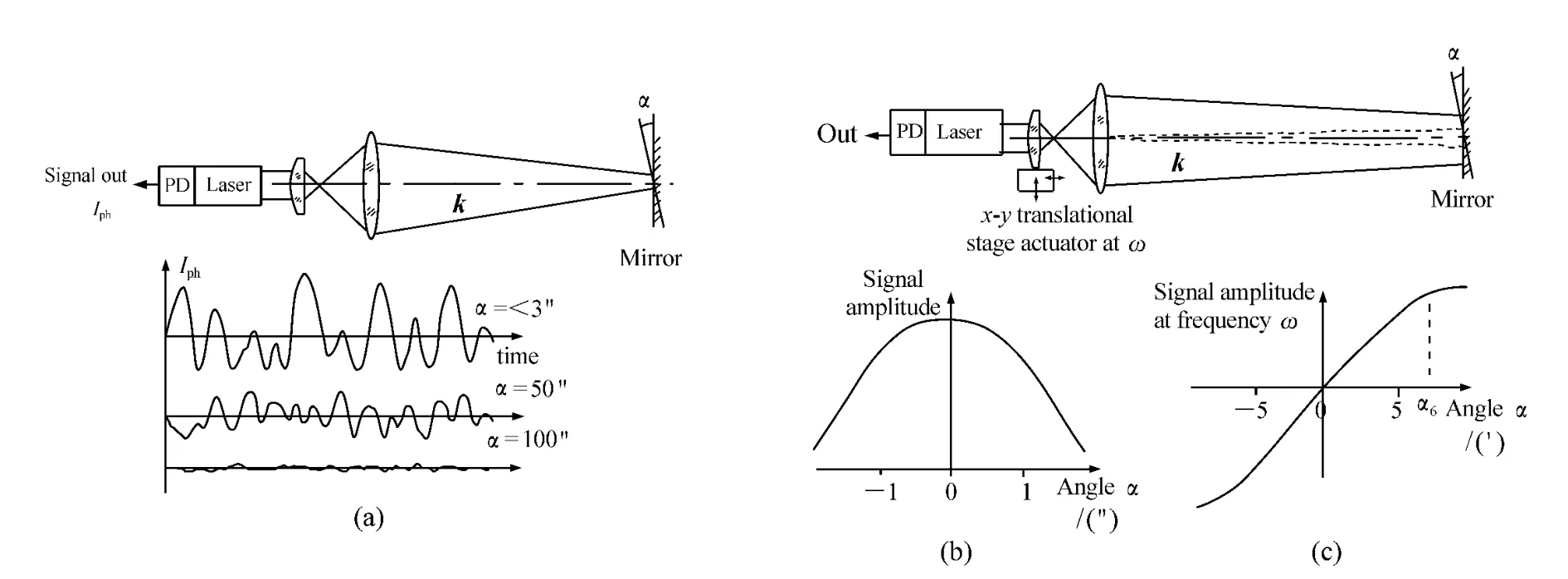
图12 SMI 角度测量:当远距离反射镜调整好后,SMI 信号由于周围的麦克风作用而被最大化( a) 。在改进的结构中,用一个XY 方向压电驱动来调制物镜角度,使得SMI 信号可对驱动信号的振幅和相位进行传感( + / -符号对应正/反相) 。抛物线状曲线( b) 被转换成过零点的准线性曲线( c) ,对应的动态范围从几弧分到零点几弧秒( 见文献[35])Fig.12 Alignment and angle measurement with a SMI: when a remote mirror is well aligned,the SMI signal due to ambient microphonics is maximized( a) . In an improved setup,the angle is modulated by an XY piezo actuator slightly moving the objective lens. The resulting SMI signal is sensed in amplitude and phase respect to the drive signal( + / - sign for phase/antiphase) . The parabolic-like response curve( b) is thus transformed in a quasi-linear passing through the zero( c) . Angles down to a fraction of arc-sec can be measured on a dynamic range of a few arc-min( see Ref.[35])
众所周知,一般仪器的使用均力图达到高精度的最大响应条件,这里寻找Iph信号的相位关系并与压电陶瓷( PZT) 驱动进行比较。将一般SMI信号对α 近似地二次方响应关系等效地转换到线性关系,最优的结构布置( 图12( c) ) 是α =0条件下的过零点。实验表明:用传统的元件,噪音限的分辨率约为0.2″,动态范围约为5'[35]。
5 激光参数测量
根据SMI 信号波形和其细部特征可知它们不是偶然的,而是与光源的某种物理参数相关。特别是在C<1 时,波形断点的起伏揭示了激光器的线宽细节,而这时的波形破坏和突变位置是耦合强度参数C、线宽增强因子α 的特征。下面将给出基于波形分析测量这两个参数的原理。
5.1 激光线宽
自混合信号中,陡峭下降突变的相位起伏反映了如图13( a) 所示的波形起伏,该现象是由目标位移s=L0+ΔL中的小变化ΔL,或由波矢围绕k0=2πv0/c的变化Δk = Δv/c引起的。Giuliani和Norgia[36]认为两者的贡献之和作用于相位变量〈φ2〉,且可得出:
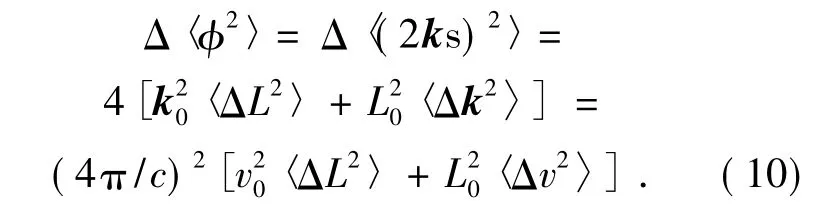
通过齿状驱动作用ΔL,测量整个相位变化Δ〈φ2〉,并将其带入L20〈Δv2〉+const,其中常数项为( 4π/c)2v20〈ΔL2〉。如图13 所示[36],在L0=10 cm到3.5 m 的位置,对后反射器施加一小( 几个波长) 的驱动信号,得到增量很小的常数项(c=0.1 rad) 。根据式( 10) 将二次项叠加,通过L0以50 cm 步长增加几步就可很容易测定线宽项L20〈Δv2〉。如图13 所示,从几米的位移就可测得3.5 ~14 MHz 的线宽Δv,最小可测线宽约为1 MHz。由这一极限可知,该方法需要较小的实验空间,只要能满足基于不匹配( 延迟外差) 的测量方法所需的1 MHz 时的传播长度c/Δv≈300 m即可。
该方法还给出了相干长度:即需要外部臂长L0远小于相干长度Lc。
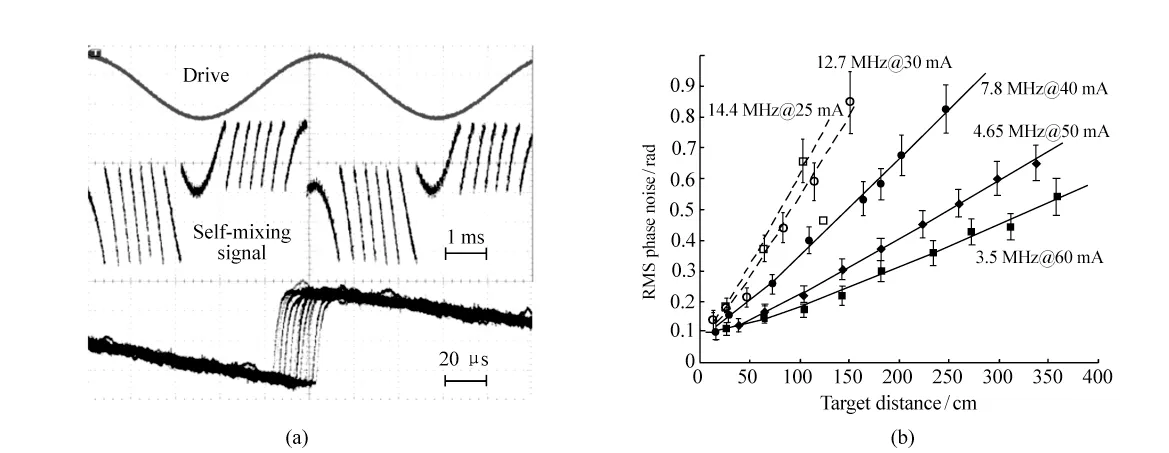
图13 ( a) 利用SMI 进行线宽测量:激光器处于C >1 状态,寻找在自混合波形上出现突变时的颤抖。相关的相位起伏变化为Δ2ks=2kΔs+2sΔk,其中第一项保持不变,第二项2sΔv/c 正比于线宽Δv。( b) 通过拟合变化量的平方和得到不同激光器的线宽。( 见文献[36])Fig.13 Line width measurement by SMI: the laser is set to a C >1 regime,then the jitter of the switching transient appearing in the self-mixing waveform is searched( a) . The variance of the associated phase fluctuation Δ2ks=2kΔs+2sΔk,has a first term which is kept constant,and a second term 2sΔv/c proportional to the line width Δv. The quadratic sum of variance contributions is fitted to obtain the line widths of different laser specimens( b) .( see Ref.[36])
5.2 α因子测量
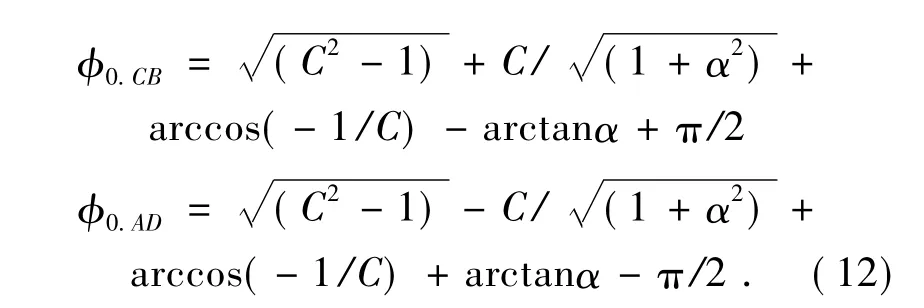
SMI 信号的波形可表达为F( φ) =cosωτ 和式(3) 。波形形状取决于反馈因子C和线宽增强因子α,可用SMI 信号得到这两个因子。2004年,Y.Yu 等人[37]提出了基于SMI 的α 因子测量方法,其中的SMI 工作在中等光学反馈区。为说明该方法,先在式(3) 中引入φ =ωτ,φ0=ω0τ,所以:

图14 给出了一个SMI 波形的例子,其中C=2,α=5。φ0增加时,F( φ) 沿路径A1-B-B1变化,若φ0减少,路径则为B1-A-A1。面A1-B-B1-A被称作迟滞面。相位延迟φ0.CB和φ0.AD可从式(11) 中获得[37]:

图14 C=2 和α=5 时SMI 信号的迟滞。寻找过零点φ0.C和φ0.D以及突变点φ0.A和φ0.B,可确定α 因子( 见文献[37])Fig.14 Hysteresis of SMI signal with C=2 and α=5.Looking at the zero-crossing points φ0.C and φ0.D and at the switching points φ0.A and φ0.B,the α-factor can be determined ( see Ref.[37]) .
φ0.CB和φ0.AD可由图14 中的4 个特征点确定,即2 个过零点和2 个突变点。根据SMI 波形可测得两相位延迟,所以可由式(12) 计算出C和α。该方法给出了1 <C<3.5 时的测量解。
当C增加到一定程度时,迟滞面积变宽,这使得过零点φ0.C和φ0.D被隐藏,而在弱反馈条件下(C<1) 突变点消失。两种情况下都可采用数据滤波处理等方式得到C和α,如利用SMI 理论模型算法对α 和C进行优化,估算得到与实验信号最佳的匹配值[38-39]。与相位方法( 4)[37]不同,为了以较高的精度估算α,需对整个SMI 波形进行数据滤波[38-39]。
上述方法基于SMI 时域波形分析。由于特殊波形可能对测量有些限制,Y. Yu[40]等人提出一种精度改善的在频域分析SMI 信号从而测量C的方法,该方法对高光学反馈水平也适用。
6 物理量测量
下面介绍几个用SMI 测量物理量的方法,这些方法主要利用了SMI 装置简单等特点。
6.1 厚度和折射率
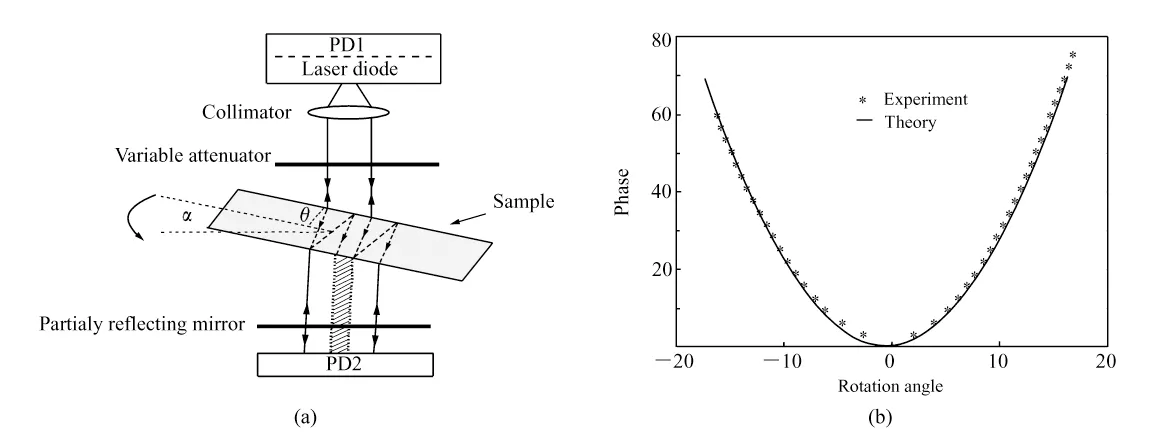
图15 用SMI 测量透明平板厚度:( a) 激光二极管作为自混合传感器( 为光二极管PD1 输出) 同时也是横向剪切干涉仪的光源( 由光二极管PD2 输出) ;( b) 两条输出条纹相减给出kdcosα,它是倾角α 的函数,与n 无关。可测厚度约为5 ~1 000 μm( 见文献[42])Fig.15 Transparent slab thickness measurement with SMI: a laser diode acts as a self-mixing sensor( output on photodiode PD1) and as a source of a lateral shear interferometer( output on photodiode PD2) ( a) . Subtraction of the fringes of the two outputs gives kdcosα( b) ,and it is the function of tilt angle α and independent from n. Range of thickness is measured about from 5 to 1 000 μm( see Ref.[42])
测量透明平板厚度最常用的仪器是剪切干涉仪,激光器出射光与在平板两面反射回来的光叠加在光电探测器( PD2) 上( 见图15( a) ) ,产生的干涉信号类型为:

与光程测量相同,相位与厚度d和平板折射率n有关。在PD1中也可得到另外一路干涉信号( 见图15) ,该信号由通过平板的光束到光电二极管PD2,然后返回到光源而产生。在光电二极管PD1上产生第二个SMI 相位信号:

将式(13) 和(14) 相减,可得到[41]:

该结果不再与n有关。以α∈-30 ~+30°旋转平板测量剪切和SMI 信号,调整尺度后计算Δφ,由式( 15) 解得d,其单位是2π/2k。可测厚度一般是5 ~2 000 μm,精确度约为2%[42]。测得d后再回到PD2信号,通过式( 13) 求解折射率。
6.2 机械共振
在某些SMI 测量中与MEMS 中检测机械共振相似,利用已知驱动波形s(t) ,能大大简化信号处理过程。
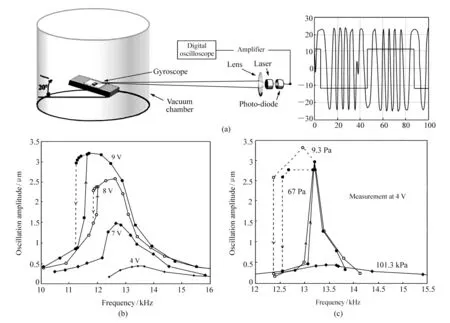
图16 用SMI 测试Si 加工的MEMS 机械性能。( a) 从激光器出射的光通过真空室的玻璃壁被会聚到芯片上的小振动块上。以一定角度( ≈20°) 观察块的振动,对SMI 条纹信号进行恰当的修正。( b) 随着驱动电压的增加,发现在8 ~9 V 时表现出共振频率漂移和随后的迟滞,表明初始的疲劳和爬行。( c) 因为残余空气摩擦共振的Q 因子减弱,腔内压力增加。( 见文献[43])Fig.16 Test of the mechanical properties of Si-machined MEMS with SMI. ( a) Light from the laser is focused on the small vibrating mass of the chip through the glass wall of a vacuum chamber. The vibration of the mass is viewed at an angle( ≈20°) ,and the appropriate correction is applied to the SMI fringe signal. ( b) As drive voltage is increased,a drift of resonant frequency can be found and then incipient hysteresis shows up at 8 ~9 V,indicating incipient fatigue and creep. ( c) At increasing chamber pressure,the Q-factor of resonance is damped because of residual air friction( see Ref.[43]) .
如图16 所示,用SMI 激光束以一定倾斜角( 约20°) 瞄准测量一个陀螺仪MEMS[43-44]结构中具有悬挂弹簧的测量块的面内运动,可得到较大的2k·s。典型测试块是一方形的硅板,边长是零点几个毫米,板上有许多为减轻重量而刻蚀的孔,以确保高的共振频率。块表面表现出光学粗糙性,SMI 能适用于这种不易测量的情况,因为它对散射目标适应性较强,不受光点落在静止部分或目标外面的影响,真空室的墙壁( 未经光学抛光) 对波前的破坏也不是问题。为了测量机械共振,用一方波激励Vexc产生梳状结构信号驱动MEMS,测量对应的位移幅度。
如果知道Vexc起始时刻,就很容易计数干涉仪信号周期数,即以步长λ/2 测量其幅度。图16为以驱动电压Vexc为参数的MEMS( 图16) 频率响应图,响应曲线迟滞揭示了初期疲劳和机械结构的爬行情况,给出了MEMS 设计中的关键因素,硅是常见的电子材料,但其机械特性却被忽视,特别是高压条件下的机械特性。同样的测量,作为压力的函数,揭示了机械量中的实际阻尼因子,这个参数不易计算。
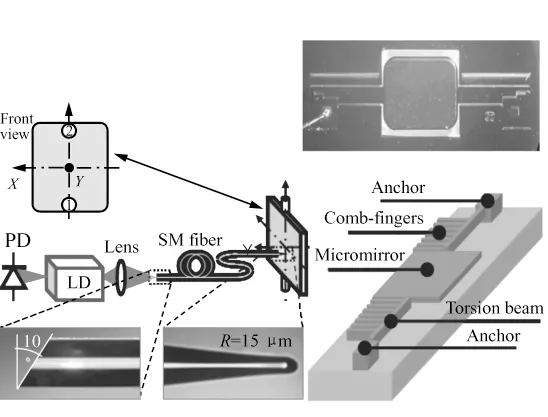
图17 Si 基底上加工的MEMS,用单模光纤作为探针对准微型反射镜进行测试,与激光器耦合的光纤端面有一定斜度,而在传感反射镜运动的一端逐渐变细形成透镜( 见文献[44])Fig.17 In a Si-machined MEMS,micro-mirrors are tested by using a single mode fiber as the probe pinpointing the mirror. The fiber has a tilted splice at the laser coupling end,and is tapered and lensed at the other end to sense the mirror movement( see Ref.[44]) .
对于MEMS 结构的另一参数,V.Annovazzi 等人[44]完成了光电开关微反射镜的测量。在SMI结构中插入一光纤尾纤( 见图17) ,在目标端会聚成极其微小的点到微型反射镜上,从而探测激励的响应和共振频率。
6.3 应力/应变图
在3.2.1 节中,SMI 测振仪通过增加不同的操作模式得到了进一步的发展,可以测量叠加到大的共模运动上的微小振动。
为了用传统的干涉仪进行差分测量,通常可以利用参考臂测量φ1-φ2=2k(s1-s2) 。然而,如果在散射目标表面进行测量,散斑统计可能削弱相位差,并增加一个很大的误差相位项φsp。用带有反馈环路的SMI 测振仪,并对其内部相位信号进行半条纹稳定,可以消除误差项φsp,但是它还缺少用于差分测量的第二个光学参考臂。也可以减去电信号,并且设置一个双通道SMI 测振仪来测量,其中一个通道用于共模信号sCM,另一个用于sCM+sD,由于包含了差分信号sD,因此可以构建具有相同性能的两个通道( 响应不匹配率<0.1%,噪声平台和动态范围差<5%)[45]。电子相减差分和光学相位差分干涉仪的效果相当,都可用于机械测试。
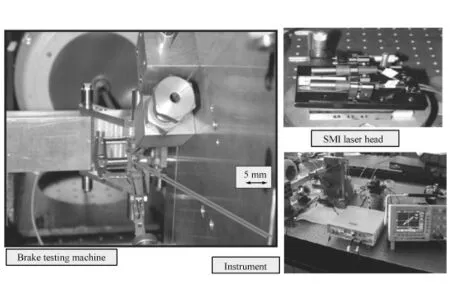
图18 半条纹稳定的SMI 测振仪可以差分模式测量散射目标,这里为对一个汽轮机马达制动的消音珠子进行的测试。两束光照到摇动体( 共模) 和珠体上( 测量) 。Fig.18 SMI half-fringe stabilized vibrometer can also work in differential mode on a diffuser target,here the damper bead of a turbine motor brake. The two beams point at the base of the shaker ( common mode) and the bead body( measurement)
图18 为制动珠实验台,其摇动机构使珠子在制动支撑上产生振动。这个压力是一个准正弦VST激励,支撑的振动为SCM,珠子振动为SD。共模宽约为15 ~30 μm,差为0.5 ~4 μm。从力学观点来看,VST激励正比于压力T,SD正比于机械样品的应力S。
用电子差分SMI 可以测得[45]样品的迟滞TS图,这也是首次获得的信息。如图19 所示,在中等压力下样品处于弹性或牛顿区,S和T线性相关且无迟滞。当达到一定阈值时,材料进入塑性区,且图形随着迟滞打开,迟滞周期扩大,直到T有小的增长,样品解体。收集这些信息对于设计和测试机械结构具有很高的价值。
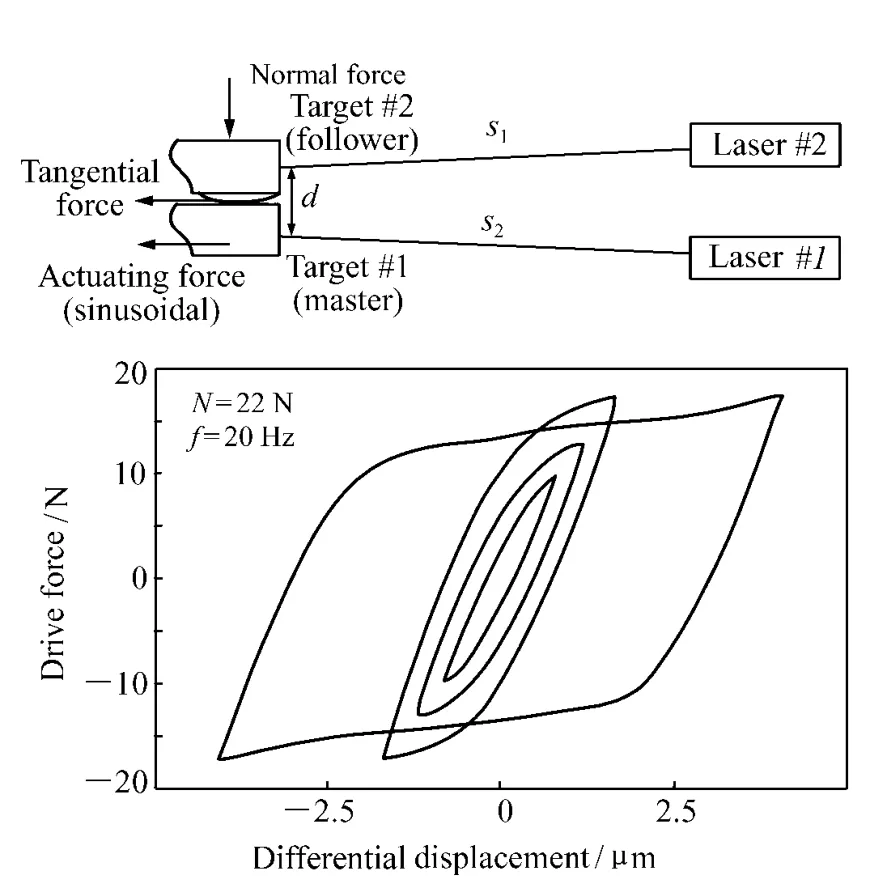
图19 首次采用SMI 差分测振计测得的应力应变图,揭示了牛顿区迟滞可以忽略( F <7 N) ,在塑性区迟滞环打开( F=8.15 N) ,珠子在解体前释放能量Fig.19 Strain-stress diagram is measured optically for the first time with the SMI differential vibrometer,and reveals the Newtonian regime where hysteresis is negligible( F <7 N) ,and the plastic regime where the hysteresis loop opens( F=8.15 N) and the bead dissipates energy,before the breakdown occurs ( at F≅17.5 N) .
6.4 生物运行性
正/余弦重构测振仪( 3.2.3 节) 已经被用于获取生物信号[46]。在心脏病的临床实验中,已经观察到一个正常人指尖的心跳脉动,复制下心脏脉动的形状,比如LFE( 左心室排出) 和DI( 分色c 切迹) ,这些通常都可在正常心电图( 见图20)中观察到。
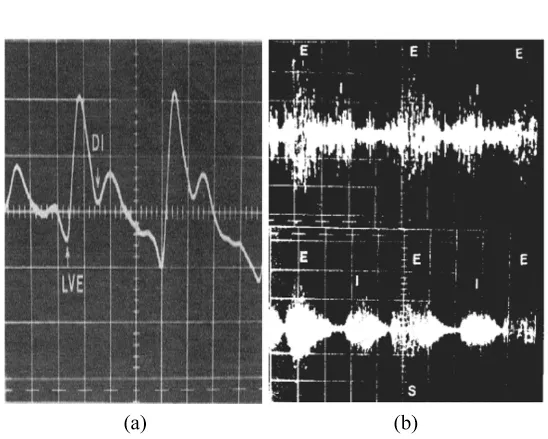
图20 用He-Ne SMI 测量生物信号,( a) 指尖的血流脉冲(0.5 μm/div,0.3 s/div) ; ( b) 在病人背后探测的呼吸信号对比,听诊器声音信号( 上) SMI 光学波形( 下) ( 见文献[3])Fig.20 Two samples of biomedical signals measured by the He-Ne SMI,( a) pulsation of blood on a finger tip (0.5 μm/div,0.3 s/div) ,( b) respiratory sounds detected on the back of a patient,with the acoustical signal of a stethoscope ( top) compared to optical waveform taken by SMI( bottom) ( see Ref.[3]) .
J. Hast 等人[47]使用另一种结构的SMI 对200 名志愿者进行了检测,测量前臂径向动脉中心血管脉冲的多普勒信号( dφ/dt=2kv) 。检测发现,dφ/dt与从中指上测得的血压波形的时间导数有很好的相关性(c=0.84) ,证实了SMI 做出诊断结果的有效性。
正/余弦测振仪可以获得生物背部的呼吸音[46]。从测量到的呼气和吸气的声音( 见图20的I 和E) 可以发现,除了缺少波峰以外,波形和传统听诊器得到十分相似,而差别是由呼吸时听诊器和皮肤的摩擦造成的。在从皮肤上获取运行性信号的所有实验中,皮肤表面都是未经处理的,但患者必须被固定以避免因散斑图统计造成的SMI 信号变坏。
最近,L.Rovati 等人报道了关于生物信号获取的一个有趣的应用[48]。用一个超发光二极管做SMI 光源,可以测量一个静脉模拟毛细管中的液流的速度变化。A. Pesatori 等人[49]报道了经过改进的用于血流测量的SMI,该SMI 中毛细管以倾角θ 与轴向对准,从而得到信号2kscosθ。R.Kliese 等人[50]利用具有更短波长的GaN( λ =405 nm) 和θ=15°的倾斜度观察毛细血管,得到的最小可测流速低达26 μm/s。
7 传 感
考虑相位测量相反的情况,SMI 测量输入信号的振幅时可用作传感器。如第2 节所述,SMI属于相干探测器类干涉仪[5],它的输出与场幅度成正比,在探测量子限下被提取特征,即SNR 受限于所进入光子流的量子化( 或粒度) 。因此,SMI 具有高灵敏度感知小信号的能力,已被开发应用到多种场合。
7.1 远程回波和回波损耗
对于远程回波的响应,SMI 很容易通过反射镜和衰减器的组合让一部分出射能量重新进入激光腔[51]。对于一个典型的激光二极管( 5 mW,λ=825 nm) ,探测信号的幅值与往返路径上的衰减关系曲线如图21( a) 所示。可以看出,SMI 可以检测出10-9倍输出能量的回波,由于其间注入强区(C>1) ,在约为10-3时发生饱和。因而回波探测器是一个非常敏感的回波损耗测量仪( 见图21( c) ) 。同时,它也可以对安装在激光芯片前面的用于防止其受反射光影响的光学隔离器进行隔离因子在线测量[51-52],但测量时需要增加光路的相位调制,这样远程回波的振幅就从零频部分移动至载波ω0( 调制频率) 处,避免了低频漂移,更便于振幅测量。相位调制器作为一个组件,既可以是以PTZ 驱动的用于导波的光纤线圈,也可以是用于自由空间扩音的扬声器。

图21 ( a) 探测信号的幅值与往返路径上的衰减关系曲线。( b) 作为回波探测器,SMI 可探测小至输出功率10 -9的信号。( c) 为了测量回波损耗或隔离损耗,加一个载波频率ω0、由绕在PZT 上的线圈形成的相位调制器或一个目标端的扩音器进行路径调制。SMI 信号以频率ω0 被读出,它的幅值给出了DUT 的回波损耗或插入隔离器的损耗Fig.21 Relationship between total field attenuation and relative photodetected signal( a) . As an echo detector,the SMI can sense returns as small as 10 -9 of the output power( b) . To measure the return loss or the isolation loss,a modulation of the path-length at a carrier frequency ω0 is added,through a coiled PZT phase-modulator or a target-end loudspeaker( c) . The SMI signal output is then read at frequency ω0. Its amplitude provides the return loss of the DUT or the insertion loss of the isolator
图21 ( 右) 给出了两个测量方案:(1) 测量光纤DUT 的回波损耗;( 2) 测量安装在芯片前的光隔离器的隔离因子。这两种情况下,返回能量的灵敏性优于10-8或-80 dB[51]。
7.2 共焦显微镜
SMI 传感器也已经应用于共焦显微镜中。根据C.-H.Luet al.[53]的建议,使用SMI 使得光路调整过程更加简化( 见图22) 。
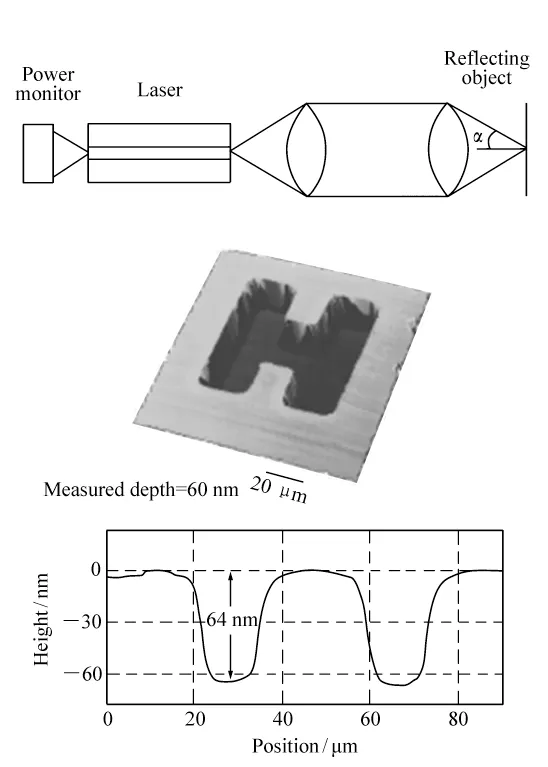
图22 SMI 可被用在共焦显微镜中,利用其自排列探测器的优势对样件扫描,得到具有空间分辨率r=1/πNA≈1 μm,典型的深度分辨率为Δz≈30 nm 的图像( 见文献[53])Fig.22 A SMI can be used in connection to a confocal microscope layout with the advantage of self-alignment of the detector. Scanning the specimen generates an image with a spatial resolution r=1/πNA≈1 μm and a typical depth resolution Δz≈30 nm ( see Ref.[53])
尽管受衍射限制的横向分辨率为λ/πNA,但由于SMI 对探测信号的电子处理,纵向分辨率可以达到30 ~50 nm[53]。M. Wang 和G. Lay 提出[54]了基于SMI 共焦显微镜的扫描轮廓仪,它对边宽为5 μm 的样品高度方向的分辨率达10 nm。
8 结束语
本文给出了基于SMI 而发展起来的各种仪器概况。SMI 是一种基于激光二极管弱耦合现象的测量方法,不仅适用于传统干涉所涵盖的运动学和尺度相关的测量,而且也可用于物理参数的测量,包括小信号探测,回波探测等,具有结构简单、精度高等特点。
本文系统整理了SMI 的测量领域,讨论了具有不同特点( 如动态范围,噪声,周期/非周期位移,模拟/数字处理等) 的几种类型的SMI,它们性能不同,代表了不同类型的仪器。位移测量时分辨率可达到亚微米量级,即使对光学特性不好的目标,其测量范围也可达到2 m; 对于振动测量,小振幅振动测量,其最大动态范围为500 μm,频率可从0.1 Hz 到几十kHz。对于大振幅振动测量,振幅可达mm 量级,误差也在nm 量级; 对速度的测量,虽然从原理上实现不是问题,但还存在受目标表面特性影响等实际问题;对距离的测量,当测量距离在1 ~3 m 时,其分辨率可达3.6 mm;对角度测量,其性能可与高质量的光学自准直仪相媲美;在激光参数测量方面,根据SMI 波形和其细部特征,本文给出了耦合强度参数c和线宽增强因子α 的测量原理。在远程回波或回波损耗测量方面,目前的灵敏度已经达到-80 dB; 在物理量测量方面,已经实现了对透明平板厚度、折射率、机械共振、应力应变的测量,同时在生物运行性和共焦显微镜方面,SMI 也获得开发和应用。
SMI 技术还远远没有得到充分的开发,在未来的若干年中,它必将不断地为年轻的研究者提供充分发挥创造力和才智的平台。
[1] SPENCER M B,LAMB W E. Laser with a transmitting window[J].Phys. Rev.,1972,A5:884-891.
[2] SPENCER M B,LAMB W E. Laser with external injection[J].Phys. Rev.,1972,A5:891-897.
[3] DONATI S.Electrooptical Instrumentation[M]. Upper Saddle River,N.J.:Prentice Hall,2004.
[4] LODI V A,DONATI S. Injection modulation in coupled laser oscillators[J].IEEE J. Quantum Elect.,1980,16:859-865.
[5] DONATI S.Photodetectors[M]. Upper Saddle River,N.J.:Prentice Hall,2000.
[6] DONATI S,GIULIANI G,MERLO S. Laser diode feedback interferometer for the measurement of displacement without ambiguity[J].IEEE J. Quantum Elect.,1995(31) :113-119.
[7] DONATI S. Laser interferometry by induced modulation of the cavity field[J].J. Appl. Phys.,1978,49:495-497.
[8] ACKET G A,LENSTRA D,DENBOEF A J,et al.. The influence of feedback intensity on longitudinal mode propeties and optical noise in index-guided semiconductor lasers[J].IEEE J. Quantum Elect.,1984(20) :1163-1169.
[9] RANDONE E,DONATI S. Self-mixing interferometer: analysis of the output signals[J].Opt. Express,2006,14:9788-9796.
[10] WANG W M,GRATTAN K T W,PALMER A W,et al.. Self-mixing interference inside a single-mode laser diode for optical sensing applications[J].IEEE J. Lightwave Techn.,1994,12:1577-1587.
[11] PETERMANN K.Laser Diode Modulation and Noise[M]. Dodrecht:Kluwer Academic Publ.,1991.
[12] LANG R,KOBAYASHI K. External optical feedback effects on semiconductor injection laser properties[J].IEEE J.Quantum. Elect.,1980,16:347-355.
[13] KANE D M K,SHORE K A.Unlocking Dynamical Diversity:Optical Feedback Effects on Semiconductor Lasers[M]. London:John Wiley & Sons ltd,2008.
[14] HENRY C H. Theory of spontaneous noise in open resonators and its application to laser and optical amplifiers[J].IEEE J. Lightwave Techn.,1986(4) :288-1297.
[15] RUDE A F,WARD M J. Laser transducer system for high accuracy machine positioning[J].Hewlett. Packard J.,1976:2-6.
[16] DONATI S,FALZONI L,MERLO S. A PC-interfaced,compact laser-diode feedback interferometer for displacement measurements[J].IEEE Trans. Instrument. Measur.,1996,45:942-947.
[17] VODHANEL R S,KRAIN M,WAGNER R E. Long-term wavelength drift of the order of -0.01 nm/yr for 15 free-running DFB lasers modules[C]//OFC-94 Techn. Digest,San Jose,USA Feb.20-25,1994.
[18] DONATI S,MARTINI G. Speckle-pattern intensity and phase second-order conditional statistics[J].J. Opt. Society Am.,1979,69:1690-1694.
[19] NORGIA M,DONATI S,D'ALESSANDRO D. Interferometric measurements of displacement on a diffusing target by a speckle-tracking technique[J].IEEE J. Quantum Elect.,2001,37:800-806.
[20] DONATI S. Laser interferometer[EB/OL][2011-12-15].http: //www-3.unipv.it/donati/SM_Interfer_UniPV.pdf.
[21] MERLO S,DONATI S. Reconstruction of displacement waveform with a single-channel laser-diode feedback interferometer[J].IEEE J. Quantum. Elect.,1995,31:113-119.
[22] PLANTIER G,BES C,BOSCH T. Behavioral model of a self-mixing laser diode sensor[J].IEEE J. Quantum. Elect.,2005,41:1157-1167.
[23] GIULIANI G,BOZZI-PIETRA S,DONATI S. Self-mixing laser diode vibrometer[J].Meas. Sci. Technol.,2003,41:24-32.
[24] DONATI S. Laser vibrometer[EB/OL][2011-12-15].http: //www-3.unipv.it/donati/SMVibro_UniPV.pdf.
[25] BOASHASH B. Estimating and interpreting the instantaneous frequency of a signal-part I[J].Proc. IEEE,1992,80(4) :519-538.
[26] MAO W,ZHANG S,CUI L,et al.. Self-mixing interference effects with a folding feedback cavity in Zeeman-birefringence dual frequency laser[[J].Opt. Express,2006,14:182-189.
[27] LIU G,ZHANG S,XU T,et al.. Self-mixing interference in Zeeman-birefringent dual frequency laser[J].Opt. Commun.,2004,241:159-166.
[28] SCALISE L,YU Y,GIULIANI G,et al.. Self-mixing laser diode velocimetry:application to vibration and velocity measurement[J].IEEE Trans. Instrum Measur.,2004,53:223-229.
[29] GIULIANI G,NORGIA M,DONATI S,et al.. Laser diode self-mixing techniques for sensing applications[J].Optics A Pure Appl. Opt.,2002,4:283-S294.
[30] HAN D,WANG M,ZHOU J. Self-mixing speckle in an erbium-doped fiber ring laser and its application to velocity sensing[J].IEEE Photonic Tech. L.,2007,19:1398-1400.
[31] GOUAUX F,SARVAGENT N,BOSCH T. Absolute distance measurement with an optical feedback interferometer[J].Appl. Optics,1998,37:6684-6689.
[32] NORGIA M,GIULIANI G,DONATI S. Absolute distance measurement with improved accuracy using laser diode self -mixing interferometry in a closed loop[J].IEEE Trans Instrum Measur,2007,56:1894-1900.
[33] GUO D,WANG M. Self-mixing interferometry based on a double-modulation technique for absolute distance measurement[J].Appl. Optics,2007,46:1486-1491.
[34] MATSUMOTO H. Alignment of length-measuring IR laser interferometer using laser feedback[[J].Appl. Optics,1980,19:1-2.
[35] GIULIANI G,DONATI S,PASSERINI M,et al.. Angle measurement by injection detection in a laser diode[J].Opt.Eng.,2001,40:95-99.
[36] GIULIANI G,NORGIA M. Laser diode linewidth measurement by means of self-mixing interferometry[J].IEEE Photonic Tech. L.,2000,12:1028-1030.
[37] YU Y,GIULIANI G,DONATI S. Measurement of the linewidth enhancement factor of semiconductor lasers based on the optical feedback self-mixing effect[J].IEEE Photonic Tech. L.,2004,16:990-992.
[38] XI J,YU Y,CHICHARO J,et al.. Estimating the parameters of semiconductor lasers based on weak optical feedback interferometry[J].IEEE J. Quantum Elect.,2005,41(8) :1058-1064.
[39] YU Y,XI J,CHICHARO J,et al.. Toward automatic measurement of the linewith enhancement factor of semiconductor lasers using optical feedback self-mixing interferometry[J].IEEE J. Quantum Elect.,2007,43(7) :527-534.
[40] YU Y,XI J,CHICHARO J. Measuring the feedback parameter of a semiconductor laser with external optical feedback[J].Optics Express,2011,19(107) :9582-9593.
[41] FATHI M,DONATI S. Thickness measurement of transparent plates by a self-mix interferometer[J].Opt. Lett.,2010,35:1844-1846.
[42] FATHI M,DONATI S. Simultaneous measurement of thickness and refractive index by a single-channel self-mixing interferometer[J].IET,Optoelectronics,2011,6(1) :7-12.
[43] DONATI S,ANNOVAZZI LODI V,MERLO S,et al.. Measurements of MEMS Mechanical parameters by Injection Interferometry[C]//Proc. IEEE-LEOS Internalional Conference on Optical MEMS,Kauai,HI,USA Jan 21-24,2000:89-90.
[44] ANNOVAZZI LODI V,BENEDETTI M,MERLO S. Spot optical measurements on micromachined mirrors for photonics switching[J].IEEE J. Quantum Elect.,2004,10:536-544.
[45] DONATI S,NORGIA M,GIULIANI G. Self-mixing differential vibrometer based on electronic channel subtraction[J].Appl. Optics,2006,45:7264-7268.
[46] DONATI S,SPEZIALI V. Laser interferometry for sensing of respiratory sounds[J].IEEE J. Quantum Elect.,1977,13(9) :899-899.
[47] HAST J,MYLLYL R,SORVOJA H,et al. Arterial pulse shape measurement using self-mixing effect in a diode laser[J].Quantum Electron,2002,32:975-982.
[48] ROVATI L,CATTINI S,PALANISAMY N. Measurement of the fluid-velocity profile using a self-mixing superluminescent diode[J].Meas. Sci. Tech.,2011,22:1-9.
[49] PESATORI A,NORGIA M,ROVATI L. Self-mixing laser doppler spectra of extracorporeal blood flow:A theoretical and experimental study[J].IEEE Sensor J.,2011,12(3) :552-557.
[50] KLIESE R,LIM Y L,BOSCH T,et al.. GaN laser self-mixing velocimeter for measuring slow flows[J].Opt. Lett.,2010,35:814-816.
[51] DONATI S,SOREL M. A phase-modulated feedback method for testing optical isolators assembled in the laser package[J].IEEE Photonic Tech. Lett.,1996,8: 405-408.
[52] DONATI S,SOREL M. High-sensitivity measurement of return loss by self-heterodyning in a laser diode[C]. Optical Fiber Communication Conference,OFC'97,Dallas,TX,USA,Feb 16-21,1997.
[53] LU C H,WANG J,DENG K L. Imaging and profiling surface microstructures with noninterferometric laser feedback[J].Appl. Phys. Lett.,1995,66:2022-2024.
[54] WANG M,LAI G. Self-mixing microscopic interferometer for the measurement of microprofile[J].Optics Commun.,2004,238:237-244.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
制造技术与机床(2019年6期)2019-06-25
航天电子对抗(2019年4期)2019-06-02
电子制作(2018年9期)2018-08-04
制导与引信(2017年3期)2017-11-02
电子制作(2016年19期)2016-08-24
中学物理·高中(2016年1期)2016-05-26
中学科技(2015年10期)2016-01-06
