基于迭代学习算法的双直线电机模糊同步控制*
2013-02-05 05:38王丽梅
组合机床与自动化加工技术 2013年3期
王丽梅,苏 畅
(沈阳工业大学a.电气工程学院;b.信息科学与工程学院,沈阳 110870)
基于迭代学习算法的双直线电机模糊同步控制*
王丽梅a,苏 畅b
(沈阳工业大学a.电气工程学院;b.信息科学与工程学院,沈阳 110870)
针对龙门移动式镗铣床双龙门框架移动的不同步问题,采用迭代学习算法抑制单轴直线电机控制系统中存在的扰动。同时,采用基于模糊理论的同步控制方案,将模糊控制器应用在双电动机驱动的轴间反馈回路,抑制不同步引起的不平衡扭矩。仿真结果表明,此种控制策略有快速的响应能力和对干扰的抑制能力,有很高的同步精度,能保证系统的同步运行。
直线电机;同步控制;模糊控制;迭代学习算法
0 引言
高速龙门移动式镗铣床在满足动、静态刚度的情况下,让工作台、工件保持静止,龙门柱沿导轨纵向进给,可以获得很高的加速度特性。因为横梁及其刀架、龙门及其相应部件等组成的大型移动机构,并不总是形成对称结构与对称受力,以及运行中存在的各种不确定性扰动,尽管龙门柱两边采用完全相同的传动机构,但最终还是不能保证龙门框架移动的一致性。这种不一致性产生的机械耦合可能使龙门框架或驱动元件受到损坏。因此,高精度同步进给技术是世界各国重型机床行业所面临的重大研究课题。直线电动机伺服系统取消了中间机械传动结构,克服了“旋转电动机+滚珠丝杠”进给方式中存在的反向间隙、摩擦和刚度不足等缺点,可获得高速度、高精度进给位移。所以文中所设计的同步控制系统,驱动元件采用参数相同的两台永磁同步直线电动机,以发挥其动态响应快,定位精度高的优点。
因为没有传动机构,永磁同步直线电动机高精度运动的实现对模型不确定性、外部干扰以及推力波动等因素格外敏感。文献[1]针对永磁同步直线电机中存在的推力波动进行了详细的分析并提出了相应的改善措施。文献[2]针对存在的静态和动态端部效应,分别介绍了各自的补偿方法,研究重点是纵向端部效应的分析。文献[3]则是通过对直线电机纵向端部效应的电磁场分析,推导出气隙磁场脉动系数、气隙磁场增大系数和纵向等效漏磁长度计算公式,提出增加端部附加绕组的方法来削弱气隙脉动磁场。本文采用闭环PD型迭代算法来抑制系统中存在的周期性扰动。
针对同步控制系统,文献[4-5]采用了多种控制方法,如:鲁棒控制、神经网络控制等,通过仿真研究证明采用这些控制方法可在同步驱动中提高同步精度。模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,本质上是一种非线性控制,它利用人类专家控制经验,对非线性、复杂对象进行控制。龙门移动式镗铣床双龙门框架之间由机械部件进行连接,存在着机械耦合性。如果框架移动不同步,将导致驱动部件、被加工工件受到严重损坏[6-7]。本文采用基于迭代算法的模糊控制器,来抑制双轴不同步所带来的不平衡扭矩,最终达到改善系统同步进给的目的。
1 永磁同步直线电动机的数学模型及干扰分析
永磁直线电机系统是一个多变量、非线性、强耦合的系统,它所受的干扰来自摩擦力、负载力、由齿槽效应和端部效应引起的纹波推力,以及电流谐波引起的电磁谐波推力等[8]。
永磁同步直线电机d-q轴坐标系下电压方程和磁链方程分别为:

式中:Fl为负载阻力;Fd为纹波推力;Dv为摩擦力;Fn为其他的干扰力;m为动子及所带负载的质量。
摩擦力分为动摩擦力、静摩擦力和粘滞摩擦力,很难用精确的数学模型描述,在直线电机中一般采用LuGre模型估计:

式中:fc为动摩擦力;fs为静摩擦力;˙vs为通过实验测得的润滑系数;B为粘滞摩擦系数。公式的最后一项Bv为粘滞摩擦力。
永磁同步直线电机所固有的端部效应,具有周期性波动的性质,将端部效应产生的纹波推力模型近似表达为一个周期性函数:式中:Fdm为纹波推力的幅值;τ为极距;y为动子机械位移。

则永磁同步直线电动机的传递函数可表示为:

2 基于迭代学习算法的单轴控制系统
迭代学习控制具有严格的数学描述和定义,适用于具有重复运动性质的被控对象。它不依赖于系统的精确数学模型,学习算法简单,需要较少的先验知识和较少的计算量。根据系统实际输出和期望输出的误差来找寻控制信号,使被控系统的实际输出轨迹在有限时间区间内实现零误差的跟踪输入,因此该算法在解决传统控制方法难以控制的复杂、不确定性系统有独到之处[9]。迭代学习控制的基本结构如图1所示。
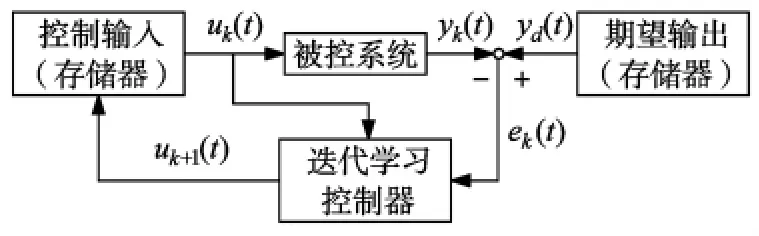
图1 迭代学习控制系统模型

图1中,系统的输入为u(t)、输出为y(t),系统的期望输出为yd(t),下标k表示迭代运算的次数,即使得在时间t∈(0,T)内,系统控制输入uk(t)→ud(t),系统的输出yk(t)→yd(t)。所得的误差ek(t)经过迭代学习律得出下次的控制输入uk+1(t)并存入控制存储记忆单元,到下次控制时再调用。在每一次迭代运算后,需要检验停止条件。若停止条件满足,则停止迭代计算。
在直线电机位置环,采用反馈加前馈迭代学习的控制结构(如图2所示)。反馈部分采用PD控制器用于实现系统镇定任务,在镇定作用下,前馈控制器可期望快速跟踪输入,有利于提高迭代学习的收敛速度。

图2 单轴直线电机位置控制系统结构
闭环学习策略是:取第K+1次运行的误差作为学习的修正项,图1中ILC使用的是PD型学习律。离散时间的PD型学习方法可以表示如下:

根据PD型学习律,只需找到合适的kp、kd值,就可以使实际输出曲线很好的跟踪理想输出曲线。其中kp、kd应满足收敛条件:

3 模糊控制器的设计
模糊控制的基本原理框图如图3所示。它的核心部分是模糊控制器(图中点画线框),由计算机的程序实现。模糊控制算法的实现过程如下:微机经过中断采样获取被控制量的精确值,然后将这个反馈值与给定值进行比较得到当前系统被控量的偏差E。把偏差信号E作为模糊控制器的一个输入量,进行模糊化处理变成模糊量。将误差E的模糊量用相应的模糊语言表示,得到误差E模糊语言集合的一个子集(是一个模糊矢量)。再由和模糊控制规则进行模糊推理,得到模糊控制量


图3 模糊控制的基本原理框图
系统采用并联式同步控制结构,对两台直线电动机给予相同的位置信号。单轴子系统采用反馈-前馈迭代学习控制器。双轴之间采用模糊控制器作为动态同步进给控制器,抑制各种扰动、不确定性因素对系统的影响,以保证同步进给精度。系统结构原理如图4所示。

图4 系统结构框图
基于对系统的分析,采用二输入单输出形式的模糊控制器,把速度同步误差ec和位置同步误差e作为模糊逻辑控制器的输入,同步速度补偿Δyf作为输出。为了消除稳态误差的影响,在控制系统中加入积分环节,结构上与模糊控制器并联。积分控制器的输出为Δyi,因此,同步控制器的总输出为:

模糊变量e、ec和Δyf的模糊子集个数均为7,分别为:NB、NM、NS、ZO、PS、PM,PB。e和 ec的论域均为{ -3,-2,-1,0,1,2,3}。Δyf的论域为{ -0.3,-0.2,-0.1,0,0.1,0.2,0.3}。各变量的隶属函数定义为三角形隶属函数。在模糊运算中,变量e、ec和Δyf根据隶属关系用模糊集合来表示。把输入、输出变量模糊化处理后,再根据人类专家知识建立模糊规则表,如表1所示。

表1 Δy的控制规则
根据模糊规则进行模糊推理与决策,得到系统的模糊输出集,然后采用重心法进行去模糊化[10],从而得到控制量的实际值。
4 系统的仿真
为验证本文所提出方法的有效性,使用matlab软件对系统进行仿真实验研究。采用参数相同的两台直线电动机,动子质量标称值M=25kg,粘滞摩擦系数B=1.2Ns/m,推力系数kT=25N/A,永磁体磁链标称值=0.286Wb,极距 τn=36mm,动子电枢电阻Ra=1.2Ω,动子电枢q轴电感Lq=18.74mH,电流放大倍数kpi=600。两个位置伺服系统采用相同的输入信号。
仿真过程如下:
图5a为单轴给定正弦位置指令,并且加入摩擦力及周期性干扰时,系统实际输出与理想输出曲线对比。图5b为采用反馈-前馈迭代学习控制算法后的响应曲线。图5c是采用反馈-前馈迭代学习控制算法后,实际输出与理想输出曲线各点误差的变化情况。从仿真结果曲线可以看出,随着迭代次数的增加,系统误差逐渐减小,当迭代10次后,系统误差减小到0.01mm,可知位置误差值明显减小。
图6为基于迭代算法的模糊控制方案与传统PID控制方案的仿真结果对比,图中虚线为基于迭代算法的模糊控制响应曲线,实线为传统PID控制响应曲线,在t=0.3s时主动轴突加500N的阶跃扰动,t=1s时从轴突加300N的阶跃扰动,从仿真结果曲线可以看出,基于迭代算法的模糊控制经过0.2s恢复到原来平衡位置,传统PID控制经过0.3s恢复到原来平衡位置。并且当遭受相同干扰时,设计的模糊控制方案比传统PID控制方案波动较小。可见系统在不确定扰动下,能快速恢复同步状态,对扰动具有很强的鲁棒性,保证了同步进给精度。

图5 单轴子系统的位置仿真

图6 加扰动后双轴同步误差
5 结论
本文对龙门移动式镗铣床双轴同步进给控制问题进行了研究,采用迭代学习控制算法抑制单轴系统中存在的周期性扰动,仿真结果表明,该算法可以提高直线电机响应速度,达到很好的抗干扰效果和较高的定位精度。同时采用模糊控制器与积分控制器并联的结构,抑制双轴不同步因素,仿真结果表明,此方法能保证系统在受不平衡负载状态或不确定扰动下快速恢复到同步状态,能把同步误差控制在允许范围内。
[1]李庆雷,王先透,吴丹,等.永磁同步直线电机推力波动分析及改善措施[J].清华大学学报(自然科学版),2000,40(5):33 -36.
[2]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000.
[3]张广益.直线电机静态纵向边端效应研究[J].电工技术学报,1999,10,14(5):18 -21.
[4]Tan K K,Huang SN,Lee T J.Robust Adaptive Numerical Compensation for Friction and Force Ripple in Permanentmagnet LinearMotors[J].IEEE Trans on Magnetic,2002,38(1):221-228.
[5]Lin F J,Shieh PH,Chou PH.Robust Adaptive Back stepping Motion Control of Linear Ultrasonic Motors Using Fuzzy Neural Network.IEEE Trans.Fuzzy Systems,2008,16(3):676-692.
[6]万鹏飞,王莉.基于模糊 PID控制的多电机同步控制研究[J].仪器仪表,2009(1):21-23.
[7]翁秀华,郭庆鼎,刘德君.基于模糊自适应PID的双直线电机同步驱动系统控制[J].组合机床与自动化加工技术,2004(9):28-29.
[8]郭庆鼎,王成元,周美文,等.直线交流伺服系统的精密控制技术[M].北京:机械工业出版社,2000.
[9]刘山.迭代学习控制系统设计及应用[D].浙江:浙江大学控制科学与工程,2002.
[10]增光奇,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
(编辑 李秀敏)
Fuzzy Control for Dual Linear Motors Based on Iteration Learning A lgorithm
WANG Li-meia,SU Changb
(a.School of Electrical Engineering;b.School of Information Science and Engineering,Shenyang University of Technology,Shenyang 110870,China)
According to the asynchrochronism of double granty frames in gantry-moving type boringmilling machine tool,an Iteration Learning Algorithm(ILC)was proposed to suppress periodic disturbance in the system.Also a synchronization scheme based on fuzzy theory was proposed in this paper.To limit the torque that caused by the asynchronization,the fuzzy controller was designed and placed in feedback circle of axes driven by dual servo motors.The simulation results show that the proposed scheme has rapid response and disturbance suppression,which can guarantee the synchronous operation of the system.
linearmotor;synchronous control;fuzzy logic control;iteration learning algorithm
TH165;TM359.4
A
1001-2265(2013)03-0063-04
2012-08-29;
2012-10-04
国家自然科学基金项目(51175349)
王丽梅(1969—),女,沈阳人,沈阳工业大学电气工程学院教授,博士生导师,主要从事交流伺服系统,智能伺服控制等研究,(E-mail)wanglm@sut.edu.cn。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
上海大中型电机(2021年2期)2021-07-21
成都信息工程大学学报(2021年6期)2021-02-12
河北书画研究(2020年1期)2021-01-18
文苑(2019年24期)2020-01-06
电子制作(2019年16期)2019-09-27
棋艺(2016年6期)2016-11-14
电子制作(2016年21期)2016-05-17
汽车零部件(2015年5期)2015-01-03