线控转向系统中集成操作杆和控制算法的研究
2013-02-18 08:35
装备制造技术 2013年1期
(青岛理工大学机械工程学院,山东 青 岛 2 66033)
电子技术的快度发展对自动化产业产生了深远的影响,致使许多自动化中的机械式部件连接逐渐被电子部件连接所取代,传统的自动化行业正发生巨大的变化。近几年来,在智能车辆系统上的研究结果将逐渐应用于商务汽车。智能车辆系统最基本的技术是线控系统,例如,线控油门系统、线控制动系统、线控转向线系统等。线控系统是一种新的技术,其用现代电子技术取代了传统的机械式连接,减轻了汽车的总质量。在这些应用中,线控油门系统已经被应用于商务车中,线控制动系统在未来将会被一些自动化的公司所采用。另一方面,虽然线控转向系统仍没有得到实际的应用,但是据我们了解,基本的线控转向系统已经在EPS行业开始形成。近几年来,线控转向系统一直得到研究,对该系统的研究主要集中在液压助力转向自动化在路感中的应用方面。因此,需要力传感器测量转向轮的输入转矩,并且其给予动力。但是转向轮的控制环与路感传感器的控制环是非耦合的。这种类型的控制方法在传递转向轮的信息时,具有较严重的缺陷,这是由EPS系统中转向轮和路轮间的机械连接导致的,但是线控转向系统中没有这种连接和缺陷。基于这种原因,驾驶员会感受到一种不协调感,而这就可能会导致交通事故发生。
在本文中,我们对线控转向系统提出了一种新的算法,该算法在两个控制环路中具有耦合的结构。这种算法是基于远程控制算法而实现的,也就是说,我们把线控转向系统视为一种双向控制系统。驾驶员的转向反应可以影响路轮动作,同样,路轮的动作也可以影响转向装置。对于这种系统,我们研发了一种由直流伺服电机和电位计组成的集成操作杆。利用这种操作杆,驾驶员可以在没有转向盘、制动踏板和驱动踏板的情况下驾驶车辆[2]。同时,对这种算法进行了实验测试,实验结果验证了这种线控转向系统的性能和控制算法的优势。
1 系统结构设计
这种系统可以使驾驶员在没有转向轮、制动踏板和驱动踏板的情况下,利用反应操作杆驾驶车辆。
1.1 系统整体结构
在图1中显示了整个系统的结构。应用一种商务的R-EPS系统驱动路轮、APM驱动节流阀、一个直流伺服电机和轮线系统驱动一个简单的机械装置来驱动刹车踏板。该系统是由SBC(单片机)、数据I/O接口、数据转换板、动力板和介质板组成的中央控制器控制的。

图1 系统整体结构
1.2 集成操作杆设计
大多数的操作杆有±20°~30°的摆动位移。在车辆驾驶过程中,这个小的位移需要驾驶员谨慎的驾驶。因而驾驶员容易感到疲劳从而导致危险事故的发生[3]。为了解决这种问题,我们设计了一种新型的操作杆。这种新的操作杆以手腕旋转推动加速和拉动制动来操作。这使得转向位移可以扩大到±90°。这种操作杆的另一种优势是:其操作仅仅需要很小的工作空间。该机构的详细构造,如图3所示。这种操作杆有两个自由度,一个用于转向,另一个用于加速或者刹车。需要一个直流伺服电机实现反应力和用于检测发出制动或者加速命令杆的电位计。这根杆有±6°的位移,中位是靠万向联轴节保持的。
2 系统控制
我们认为EPS系统是线控转向系统的基础。这是因为线控转向系统和EPS系统在组成和控制原理上具有很多相似之处,它们之间最本质的区别在于,线控转向系统完全取消了机械连接[4],鉴于此,我们认为线控转向系统是一种远程控制系统,即EPS系统在转向轮和路轮之间仍是依靠机械连接,因此,这两个部件之间的位置误差始终为零。
在本文中,我们认为线控转向系统是没有时间延迟的单自由度的远程控制系统。其控制环路如图4所示,就远程控制而言,我们把操作杆作为主控制器,EPS动力作为一个伺服控制。这种系统的计算公式如下:
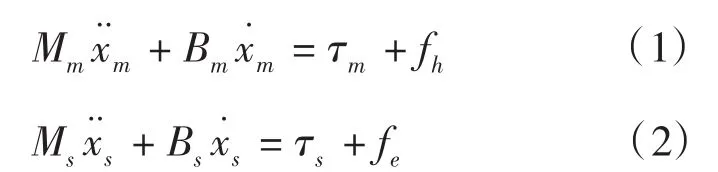
其中,
xm和xs表示位置;
Bm和Bs是粘性系数;
τm和τs是铰链驱动力;
下标"m"表示主要的参数值,下标"s"表示次要的参数值;
fh是作用于主要参数上的力;
fe是次要的施加于抵消工况环境的力。
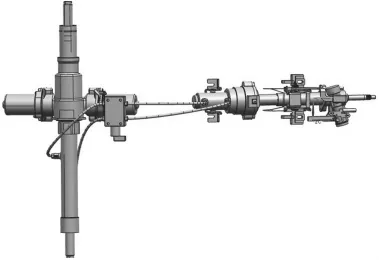
图2 操作杆示意图
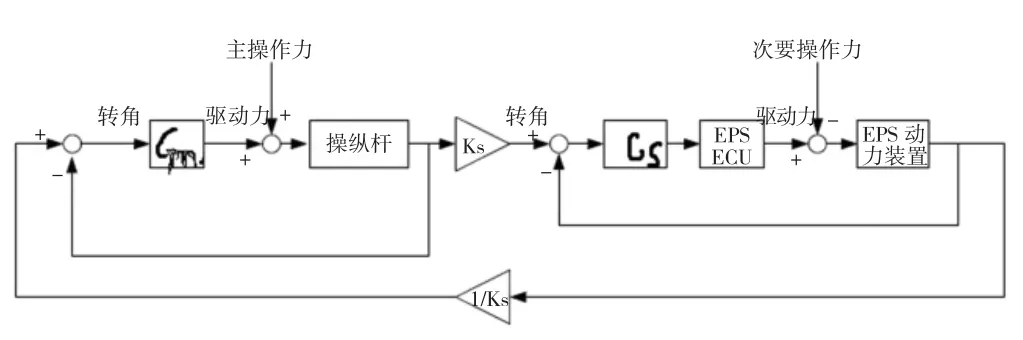
图3 线控转向系统环路控制示意图
选择该系统的简单控制器为

FTf和FtT是分别指反应力和牵引力,它们是由PD控制器提供,则
式中,Kmp和Kmd是比例系数和主参数衍生的,Ksp和Ksd是从动值。计算式如下:

式中,Ks是总转向比的比例因子。此转向比与车速比成反比。这种双向控制器可以由伺服服务器传给主服务器。
在这种情况下,主服务器是转向装置。为了安全转向,需要施加一些额外的力给主控制器以提供驱动力矩,计算式如下所示:

式中,
VV为车辆的速度;
KV(VV)为车辆行驶速度和主控制器运行速度阻尼比;
KSA(VV)为自调心增益;
KD为额外的阻尼比,对于制动驱动机构控制,一般选择PD控制器。
3 实验和结论
实验是在公路上用真实的汽车进行模拟的。在两种场合进行了测试,一种是在驾驶过程中测试,另一种是在停车过程中测试。测试结果证明:在没有反应操作杆的情况下,驾驶员在转向时要补偿自适应性造成的影响,在应用反应操作杆转向的情况下,驾驶员的转向行为与传统的转向轮转向时非常相似的,这种影响不复存在。从而,研发的反应操纵杆的性能和控制算法得到证实。
4 结束语
本论文,我们介绍了一种新型的反应操作杆,并引进了安全驾驶的一种新算法。我们应用EPS系统、APM系统和简化的刹车踏板的反应机构,建立了一个简化的DBW系统进行试验。通过真实的汽车进行场地测试,我们证实了研发的反应操纵杆和控制算法的性能。截止到目前为止,我们仍在探究更优的算法来评估汽车的驾驶性能。
[1]赵 燕.C型电动转向系统力学分析与研究[D].武汉:武汉理工大学,2006.
[2]王柏峰.基于径向基神经网络的电动助力转向系统研究[D].长沙:湖南大学,2007.
[3]吴基安.汽车电子技术[M].北京:人民邮电出版社,1999.
[4]何 军.基于DSP的汽车电动助力转向系统的设计[D].北京:北京交通大学,2007.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
汽车之友(2021年23期)2021-12-24
电子制作(2018年9期)2018-08-04
汽车工程师(2018年3期)2018-07-12
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
舰船科学技术(2015年8期)2015-02-27
中国航海(2014年1期)2014-05-09