基于相位的C-V模型乳腺超声图像分割方法
2013-03-13 01:33杨冠羽胡轶宁舒华忠
东南大学学报(自然科学版) 2013年3期
粟 华 杨冠羽 胡轶宁 舒华忠
(东南大学影像科学与技术实验室,南京210096)
乳腺癌在全世界女性常见恶性肿瘤中排名第一,超过8%的女性患有这种疾病.由于超声成像的无创性、费用低廉、易操作等特点,被广泛用于乳腺肿瘤的检测.然而,超声图像固有的斑点噪声、低对比度和边缘模糊等缺点,使得超声诊断具有很强的主观性.尽管如此,大量的临床研究表明,观察者可以通过超声图像组织区域的纹理特性和形状特性来区分良性和恶性肿瘤[1].分割是肿瘤检测和诊断的关键步骤,因此,对乳腺超声图像分割的研究具有重要意义.
常见的乳腺超声图像分割方法包括阈值法[2]、形变活动轮廓模型法[3-4]、神经网络法[5-6]等.Chang 等[3]采用棍棒算法和形态学方法进行降噪、滤波,然后应用基于灰度值和灰度差分的形变模型对图像进行分割.基于神经网络的方法在乳腺超声图像中也得到了广泛应用,该方法根据一系列的输入特征,进行分类决策.Chen 等[5]提出了一种神经网络法,其输入为方差比、自相关比及小波系数的分布失真,该方法并没有考虑图像的斑点噪声和伪影.Shan 等[6]提出了一种基于多域特征的神经网络法.
本文在文献[6]的基础上,提出了一种基于相位特征的C-V 模型分割方法.实验结果表明,与基于灰度的活动轮廓模型以及基于相位特征的神经网络方法相比,利用本文方法对乳腺超声图像进行分割,准确率明显提高.
1 基于能量的相位特征
局部相位信息提供了一种标识图像结构的有效方法[7-8].在图像的空间域上,利用局部相位或相位的一致性可以有效地标识图像的亮度特征,该特征是基于亮度轮廓的形状而不是亮度差分幅值的.例如,在阶跃边缘处,相位值为0 或π;在屋脊边缘处,相位值为π/2;它不受图像亮度或对比度变化的影响.因此,用相位信息来标识超声图像边缘具有较好的鲁棒性.文献[6]提出了一种基于最大能量方向的相位特征PMO.
为了计算PMO 特征,首先将图像I 变换至频率域,并利用4 个不同尺度上6 个不同方向的LOG-Gabor 滤波器[9]进行滤波.令s =(2,4,8,16)表示滤波器的4 个不同尺度;θ =(0°,30°,60°,90°,120°,150°)表示滤波器的6 个不同方向.LOG-Gabor 滤波器核函数为

式中,ω 为待滤波图像的频率;k,ω0,θ0分别为滤波器的带宽、中心频率和方向;δθ为θ 的高斯函数的方差,此处取为π/6.k/ω0表示为保持滤波器形状而设的常量,在本实验中,取值为0.55.
将图像转回至空间域,得到一系列图像X.采用方向为θ 的滤波器进行滤波,将得到的图像相位信息记为Pθ,能量信息记为Εθ;采用尺度为s、方向为θ 的Log-Gabor 滤波器进行滤波,图像的虚部和实部分别记为M(X,θ,s)和R(X,θ,s),相位信息为P(θ,s),则

式中,n 为尺度个数.
PMO 特征为最大能量方向所对应的相位,可表示为

式中,T(i,j)为点(i,j)处的特征值.
虽然PMO 特征在超声图像中标记边缘具有鲁棒性,但其在增强目标轮廓的同时,也增强了超声图像中其他边缘,为此需要消除轮廓内外的边缘信息.采用Yu 等[10]提出的SRAD 方法对原始图像进行降噪处理,该方法在降噪的同时也能保存边缘信息.将PMO 特征与降噪后的图像点乘,利用5 ×5的中值滤波器滤波,便可得到一个边缘较清晰的PMO 特征.为增强特征亮度,利用下式将其灰度值调整至[0,1]:

式中,Tlig(i,j)为点(i,j)处增亮后的特征值.
为了进一步增加目标区域与背景区域的对比度,采用下式使亮的像素更亮,暗的像素点更暗:

式中,Tenh(i,j)为点(i,j)处对比度增强后的特征值.
2 C-V 模型
Chan 等[11]提出了一种基于水平集的分割方法,即利用设定的能量函数得到演化方程,该方程涉及到的图像信息是图像定义域范围内的积分和,是一种全局信息,没有包含图像的任何边缘信息.对于图像中存在的边界模糊或断裂的情况,该方法仍能取得较好的分割结果,并且具有一定的除噪作用.
定义图像I 的坐标集为Ω,u 为定义在Ω 中的子图,曲线C 为u 的边界,则曲线C 将图像划分为曲线内部和外部2 个区域.设C1和C2分别表示这2 个区域的平均灰度,并用高一维的水平集函数Φ来描述曲线随时间的变化情况.则当能量函数最小时,水平集函数Φ 的零水平集即为期望的目标边界曲线C,即

式中,μ,ν,λ1,λ2为常系数;H(Φ)为Heaviside 函数.对于每一步演化的Φ,C1和C2可由下式计算得到:
Heaviside 函数取为

由式(8)可推导出关于Φ 的欧拉-拉格朗日方程为

式中,δε为Dirac 函数,可表示为

此外,将增强后的PMO 特征视为图像I,设置参数为:μ=650,ν=0,λ1=1,λ2=1,ε=1.0.
3 实验结果
为了评价本文方法的优劣,利用真实的医学数据进行实验.图1给出了基于相位的C-V 模型分割方法的过程及结果.图1(a)为一幅乳腺超声图像,其中斑点噪声、边缘模糊为图像分割带来了很大困难.图1(b)为最大能量方向所对应的PMO 特征.图1(c)为采用SRAD 方法降噪后的图像,可以看出,斑点噪声得到降低,同时边缘信息也得到保留.为了消除轮廓内外的边缘信息,将PMO 特征与SRAD 降噪后的图像点乘,得到图1(d).先后采用式(6)和(7)对图1(d)进行增强,得到图1(e),可以看出,PMO 特征图像亮度明显增强.对图1(e)进行基于C-V 模型的分割,得到图1(f).
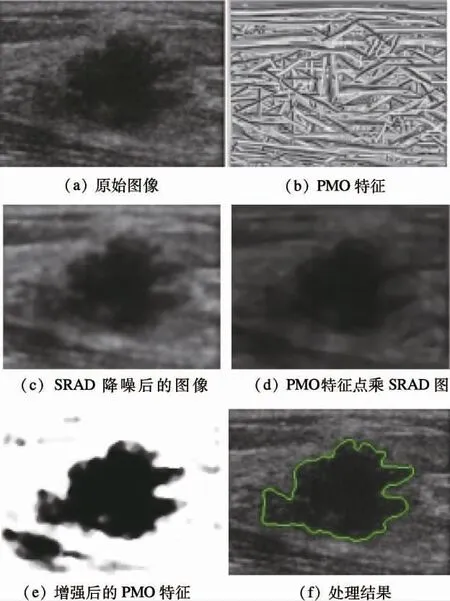
图1 基于相位的C-V 模型分割方法的过程及结果
此外,还利用基于灰度的水平集模型对图像进行分割,结果见图2.图2(a)和(b)分别是利用CV 模型[11]和GAC 模型[12]进行分割的结果;图2(c)为医生手动分割的结果.对比图1(f)和图2可以看出,利用本文方法进行分割,准确率明显提高.

图2 多种分割方法结果对比
为了更客观地评价方法的有效性,将医生手动分割结果视为实际轮廓,将分割结果与实际轮廓的误差进行量化.首先,将实际轮廓和分割轮廓都包含的区域定义为确定区域,记为Tp;将包含在分割轮廓内但不在实际轮廓内的区域定义为误测区域,记为Fp;将包含在实际轮廓内但未包含在分割轮廓内的区域则定义为漏测区域,记为Fn.根据这3种区域,可以定义3 个量化分割误差的参数:部分面积误差率Pd、敏感度Cs和精确度Ca.其计算公式分别为:

式中,Am=Tp+Fn表示实际轮廓包含的区域;Ad=(Tp+Fp)-(Tp+Fn)=Fp-Fn表示区域之间的误差.Pd越大,则分割结果在实际区域外的面积越大;Cs越大,则分割结果在实际区域的面积越大;Ca越大,则共同区域外的区域面积越小.基于不同方法的分割结果误差比较见表1.

表1 分割结果的误差比较
由表1可以看出,与其他方法相比,利用本文方法所得到的Cs略低于C-V 模型分割结果,这是因为C-V 模型分割得到的轮廓面积总体较大,覆盖实际轮廓的面积也大.此外,利用本文方法得到的分割结果Pd的绝对值最小,Ca最大,表明与真实轮廓误差最小,分割的精确度最高.
4 结语
本文提出了一种基于相位特征的C-V 模型乳腺超声图像分割方法.与基于灰度信息的活动轮廓模型相比,本文方法利用了局部相位特征,减少了对灰度及对比度的依赖,可以有效地克服乳腺超声图像中存在的灰度不均匀和噪声的干扰,提高了算法的鲁棒性.对真实的医学数据进行实验,验证了相位特征在区分乳腺图像目标与背景的有效性.相比神经网络方法,将相位特征与C-V 模型结合应用于乳腺超声图像分割具有更高的准确性.
References)
[1]Alison N J,Djamal B.Ultrasound image segmentation:a survey[J].IEEE Transactions on Medical Imaging,2006,25(8):987-1010.
[2]Liang K C,Rogers A J.Three-dimensional ultrasound guidance of autonomous robotic breast biopsy:feasibility study [J].Ultrasound in Medicine and Biology,2010,36(1):173-177.
[3]Chang R F,Wu W J,Moon W K,et al.Segmentation of breast tumor in three-dimensional ultrasound images using three-dimensional discrete active contour model[J].Ultrasound in Medicine and Biology,2003,29(11):1571-1581.
[4]Liu B,Cheng H D,Huang J H.Probability density difference-based active contour for ultrasound image segmentation[J].Pattern Recognition,2010,43(6):2028-2042.
[5]Chen D R,Chang R F,Kuo W J,et al.Diagnosis of breast tumors with sonographic texture analysis using wavelet transform and neural networks[J].Ultrasound in Medicine and Biology,2002,28(10):1301-1310.
[6]Shan J,Wang Y X,Cheng H D.Completely automatic segmentation for breast ultrasound using multiple-domain features[C]//Proceedings of 2010 IEEE International Conference on Image Processing.Hong Kong,China,2010:1713-1716.
[7]高梁,刘晓云,陈武凡.基于相位和GGVF 的水平集乳腺超声图像分割[J].仪器仪表学报,2012,33(4):870-877.
Gao Liang,Liu Xiaoyun,Chen Wufan.Phase and GGVF-based level set segmentation of breast ultrasound images[J].Chinese Journal of Scientific Instrument,2012,33(4):870-877.(in Chinese)
[8]Belaid A,Boukerroui D,Maingourd Y,et al.Phasebased level set segmentation of ultrasound images[J].IEEE Transactions on Information Technology in Biomedicine,2011,15(1):138-147.
[9]Kovesi P D.Phase congruency:a low-level image invariant[J].Psychological Research,2000,64(2):136-148.
[10]Yu Y,Scott T A.Speckle reducing anisotropic diffusion[J].IEEE Transactions on Image Processing,2002,11(11):1260-1270.
[11]Chan T,Vese L.Active contours without edges[J].IEEE Transactions on Image Processing,2001,10(2):266-277.
[12]Caselles V,Kimmel R,Sapiro G.Geodesic active contour [J].International Journal of Computer Vision,1997,22(1):61-79.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
中国交通信息化(2017年4期)2017-06-06
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21