水下测试基阵机械扫描装置的设计
2013-04-13 09:30薛璞汤斌
计测技术 2013年2期
薛璞,汤斌
(中航工业北京长城计量测试技术研究所,北京100095)
0 引言
中航工业北京长城计量测试技术研究所自主研制了多种水下测试基阵机械扫描装置,它能携带水下声强传感器实现长距离环形扫描,并实现了全自动化位置反馈控制。该装置为计量测试系统中非标计量装置的机械辅助设备设计,已应用于某高校水下舱段测试试验;该装置能够最大限度的减少计量实验过程中的误差,提高计量检定过程的工作效率。
这种机械设计方案可以有很多变化。本文基于本课题的实际应用情况,对其环形基阵架进行有限元分析,通过有限元分析的结果并结合实际现场工况的需要,确定最优的设计方案。
1 机械功能指标及电控系统方案
1.1 功能要求
水下测试基阵机械扫描装置包括基阵架、扫描控制系统和扫描控制计算机,该装置主要用于对指定水下舱段测试试验模型进行环形扫描,由计算机控制,使扫描控制系统带动基阵架和声强探头运动,完成舱段试验模型柱面和平面的声强测量,为相关的测量任务提供机械辅助[1]。其主要性能指标如下:基阵架由接头和连接杆构成,形状为环形;直径约2.6 m;基阵架声散射强度小于等于-20 dB;声强探头固定支架在圆环基阵架上固定位置的相对偏差小于等于1 mm。
1.2 控制系统设计
如图1所示,控制系统主要由四部分组成:现场操作台、控制计算机、电机控制系统和位置反馈系统。现场操作台包括位移控制按键、LED 位移数码显示器、CAN 总线接口和电机运动控制器等。两个拖动电机的控制是根据编码器的反馈信号进行定位控制。
显示电路实时将各位移编码器的位移读数显示在LED 显示器上。位移电机控制电路根据编码器的读数对位移电机进行控制,使被控对象保持在要求的位置。CAN 总线或无线接口为远程控制提供了可靠的数据接口,操作人员可以在计算机上读取当前位移数据,并通过相应指令对平台和温度探头的位移进行控制。
限位保护的功能是避免因位移部件的运动范围超出系统设计允许值而使整个系统的机械或电器发生损坏。
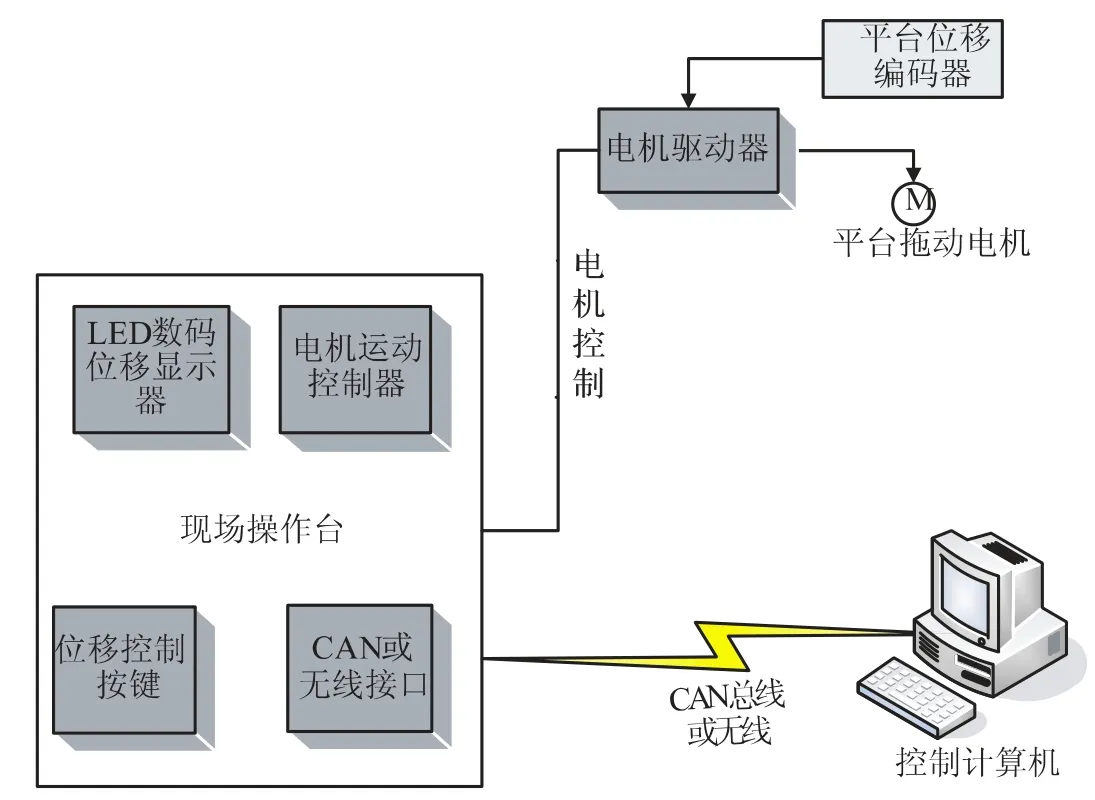
图1 控制系统结构图
此装置进行二级限位保护。限位控制信号是第一级限位保护,控制信号会对运动控制器中的微处理器产生中断,从而使装置不能在规定方向上运动,但可进行其他方向的运动,从而脱离限位保护状态。限位控制开关是第二级限位保护,如果控制电路损坏而导致电机失去控制就利用此限位开关进行限位保护,如果位移部件的运动范围超出机械运动系统允许值,此时限位控制开关就会切断电机的电源,从而避免设备的损坏[2]。
2 机械系统总体设计
2.1 基阵架机械结构整体设计
基阵架机械结构主体如图2所示,位移机构采用圆导向光轴与直线轴承的导向方式,采用齿轮齿条传动方式。
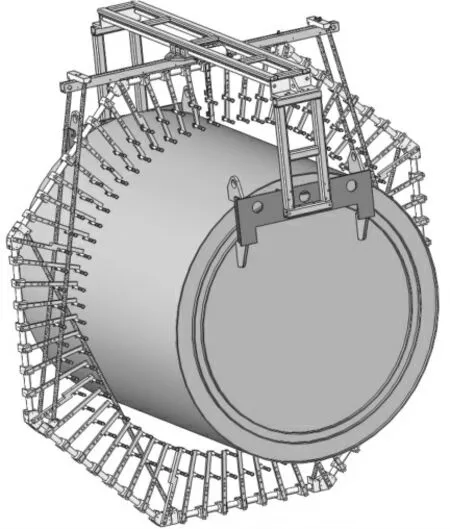
图2 基阵架机械结构整体设计
扫描架沿X 方向扫描范围:舱段行程2300 mm。
基阵架主体结构采用了碳纤维材料连接合金铝件的方式,重量轻,强度高,同时可大大减小在水中对模型辐射声场的影响。环形扫描架由8 根直径40 mm的空心碳纤维杆和若干联接接头组成,碳纤维杆以45°圆弧为等分角依次连接,连接处安装传感器,此外每一根碳纤维杆上再安装7 对传感器,安装完毕后,128个传感器呈内径2600 mm 内接圆。传感器与舱段表面距离300 mm。
2.2 碳纤维杆的连接
八根碳纤维杆的连接采用定位销加螺纹拧紧方式连接固定,如图3所示,考虑到接头强度直接影响最终扫描环的精度,接头采用强度较高的铝合金,不采用非金属材料。
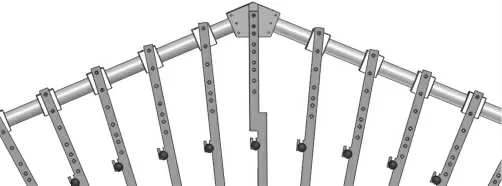
图3 碳纤维杆的连接
3 基阵架水下测量有限元分析
在设计过程中,由于整个圆环扫描架自身加上传感器及其电缆后的重量比较大,在水中还有一定的阻力,安装后会由于重力不能保证整个扫描架呈圆形扫描状态,从而影响水下测量的准确度。
为保证水下测量准确度,设计中对基阵架主体进行了有限元分析,如图4所示,考虑到基阵架变形较大,左右两侧分别加上两根直径为16 mm 的碳纤维杆进行拉拽,变形有限元分析如图5所示。
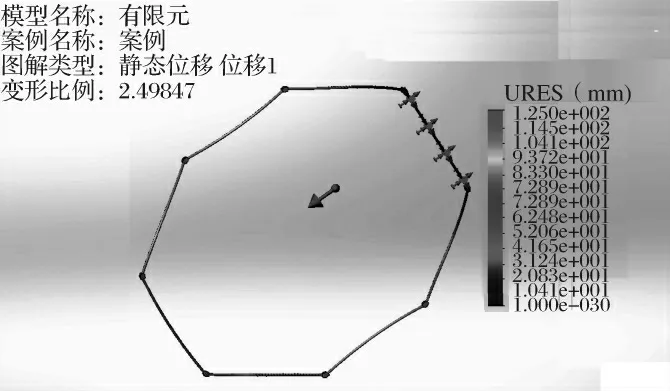
图4 基阵架主体有限元分析
由图中可以看出,没有带拉杆的基阵架圆环最大变形120 mm,两侧带拉杆的基阵架圆环最大变形46 mm,此外,变形最大点均在底端横杆处。在底端再加两根拉杆,进行有限元分析,如图6所示,此时基阵架圆环最大变形为6.7 mm。
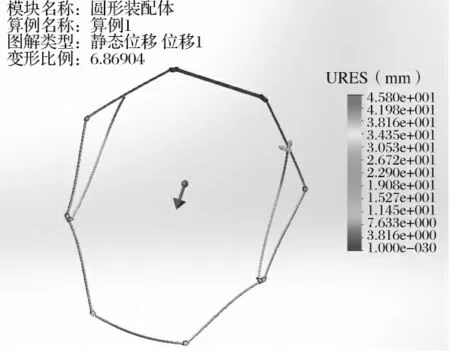
图5 两侧带拉杆基阵架有限元分析
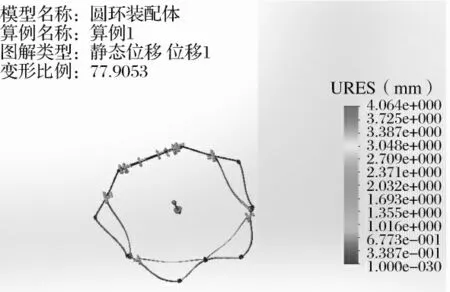
图6 带四根拉杆的基阵架有限元分析
从表1 有限元分析结果可以看出,当基阵架带四根拉杆的情况下能够满足整个水下测量误差达到最小,但同时最大变形位置出现在底端杆部连接处,说明整个圆环的圆度变形量可以控制在测量要求范围内,但在设计中要注意碳纤维杆连接处的强度。在设计过程中,使用了铝合金作为碳纤维杆连接件的加工,所以能够保证其强度。
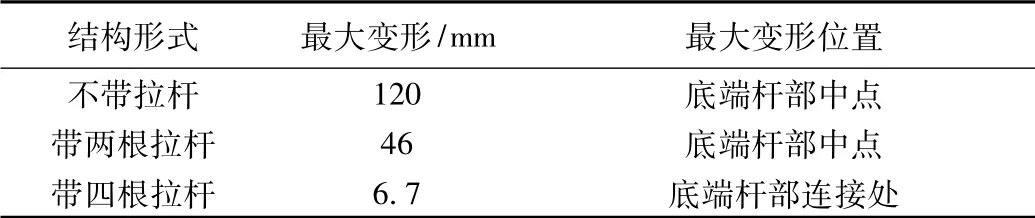
表1 有限元分析结果
4 定位误差
4.1 理论位移定位误差计算
基阵架位移机构采用圆导向光轴与直线轴承的导向方式,整个装置的传动系统采用齿轮齿条传动方式。基阵架位移机构位移控制误差计算如下[1]:
1)电机控制误差:驱动电机选用了带谐波齿轮减速机和编码器反馈的步进电机,自带13∶1 行星齿轮减速机,输入电压单项220 V,由所选电机手册查得电机编码器最大细分数为2000 脉冲/r,可以得到


2)齿条加工精度:根据直线导轨技术要求,查机械设计手册,齿条加工误差为0.2 mm;
3)齿轮齿条啮合齿隙由安装误差确定,若齿轮齿条啮合误差按0.1 mm 计算;
由公式“位移机构理论误差=电机控制误差+齿条加工误差+齿轮齿条啮合误差”计算得出此位移机构理论误差为0.0029 +0.2 +0.1=0.3029(mm),满足定位误差要求。
4.2 实验结果
水下声学计量检测过程是在整个圆环基阵架沿舱段轴向方向的行程范围内,分别以相同位置间隔进行实地多次检测,对于检测结果分别取各点数据中的误差最大值,并对误差取平均值。而整个实验过程分别采用不带拉杆、带两根拉杆和带四根拉杆三种机械连接方式,表2 为实际应用过程中三种不同结构所产生的位移定位误差和实际变形。
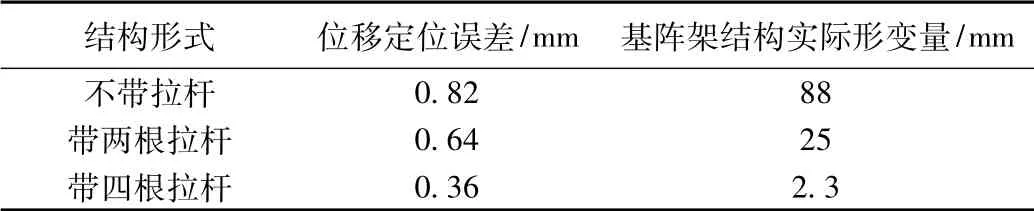
表2 实际应用过程中三种不同结构所产生的位移定位误差和实际变形
从实际检测结果看出,定位误差均能满足使用要求,带四根拉杆的结构形变量能够满足要求。
5 小结
本文详细介绍了水下测试基阵机械扫描装置中环形基阵架的受力情况,并在实际应用中对几种结构方案进行比对分析,从而最终确定对测量误差影响最小的一组方案,在计量辅助机械设备的研制过程中,这些机械结构的受力变形都会对实际计量过程产生影响,因此提高机械结构的性能对计量实验的准确性有深远的影响。
[1]汤斌,王文健,王华.两种升降回转定位装置的设计[J].计测技术,2012,32(3):30-32.
[2]李国文,牟娟,孙千军.五自由度位移平台控制系统设计[J].计测技术,2012,32(2):29-32.
[3]汤斌.高水压环境下机械位移机构设计[J].计测技术,2012,32(2):26-28,32.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
锻压装备与制造技术(2021年3期)2021-08-13
水运工程(2020年2期)2020-02-26
物流技术与应用(2019年6期)2019-07-16
水下无人系统学报(2018年5期)2018-11-09
声学与电子工程(2017年1期)2017-06-22
铁道机车车辆(2016年3期)2016-10-25
水利科技与经济(2016年7期)2016-04-25
重型机械(2016年1期)2016-03-01
西北工业大学学报(2015年3期)2015-12-14