
基于模糊滑模的固液分离流量控制技术的研究
2013-04-23 02:07朱湘临刘国海
中国酿造 2013年6期
朱 浩,朱湘临 *,刘国海,孙 谧
(1.江苏大学电气信息工程学院,江苏 镇江 212013;2.中国水产科学研究院 黄海水产研究所,山东 青岛 266071)
随着十八大上“海洋强国”战略的提出,提高海洋资源开发能力,发展海洋经济,保护海洋生态环境日益成为人们关注的焦点。沉降离心是目前海洋生物酶发酵中的一道重要工艺,其中进料流量是影响离心效率的一个重要参数[1]。如果进料量过大,轴向流速过快,较细粒子在转鼓内停留时间将少于沉降所需时间,则细粒子将随液流溢出鼓外而不能被分离,如进料量过小,虽粒子可被分离,但分离速度过慢,效率却太低[2]。根据实验得知,在一定范围内,流量的适当变化对分离效率影响较小,当流量增加到一定范围分离效率较低,因此在海洋生物酶沉降离心过程中需将流量维持在一定范围内。
滑模变结构控制对系统的数学模型精确性要求不高,对系统的不确定参数、参数变化、数学描述的不确定性及外界环境的扰动具有完全的自适应性。但由于滑模控制为了使系统保持在滑动流形上运动而需在不同的控制逻辑间来回切换,容易引起对系统不利的抖振。
相对于传统的滑模控制将模糊控制与滑模控制相结合滑模控制的抖振问题也得到了很好的削弱,控制精度和响应速度得到了相应提高,同时解决了传统模糊控制器设计不依靠被控对象的模型,而是依靠专家或操作者的经验知识,难以保证控制系统的稳定性的问题。
1 离心机中流量分析
在流体力学中质量守衡定理的表达式为连续方程,在离心机的内部,流场中取一微元(见图1)对于轴对称情况,环向变化率为零,得:[3]
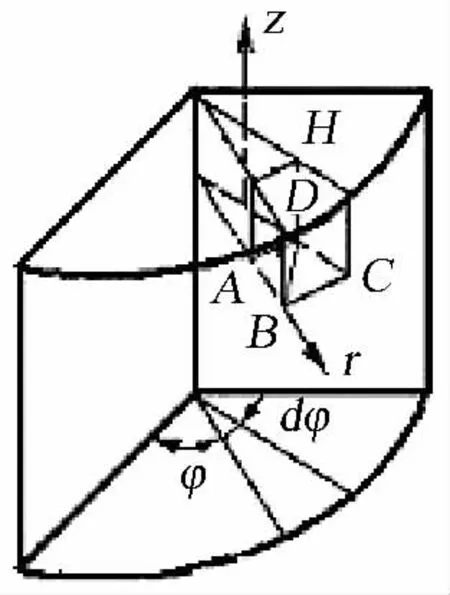
图1 离心机内微元速度分析图Fig.1 Analysis of centrifuge infinitesimal speed

可以看出离心机中流量会随着转速而变化,同时由于实际操作中沉渣等因素也会导致离心机中流量发生变化,因此控制离心机中流量在一最佳值具有重要实际意义。
2 模糊滑模控制器设计
2.1 模糊滑模控制器系统原理
模糊滑模变结构控制器系统原理图见图2。
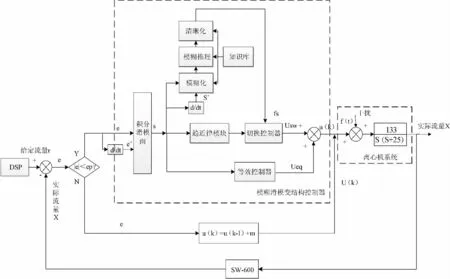
图2 模糊滑模变结构控制器系统原理图Fig.2 Schematics of variable structure control system of fuzzy sliding mode
如图所示由所述的DSP模块输出流量传感器下一时刻的位置指令r(k),由所述SW-600流量传感器探测并输出当前流量的位置信号x(k),获得误差信号e(k)=r(k)-x(k)。当误差信号在一定范围内时,将误差信号e(k)和e’(k)做为滑模控制器的输人进行数据处理得到切换函数s(k),等效控制ueq和切换控制usw。再将切换函数s(k)和s’(k)作为模糊控制器的输入进行模糊推理等处理输出fs再反馈给切换控制。经过滑模控制器模块和模糊控制器模块处理后,控制信号u(k)=ueq+usw。当误差信号不在设定范围时,则取控制信号为u(k)=u(k-1)+m,m为一有限常数值。
2.2 滑模控制器设计
本滑模控制器的状态方程为:

其中,x为状态量,u为控制量,x∈Rn,u∈Rm,A∈Rn×n,B∈Rn×1,(A,B)完全可控。
设采样时间为T,设计基于趋近律的滑模面:

切换函数为

其中,c为可控常量,C∈Rn×1为一个常数矩阵。
当系统进入滑动模态时,取等效控制ueq为控制量,s(k)满足

将式(6)代入式(5),有

由式6得,

将式(5)和(6)代入式(8)得

当[CB]满秩时,有

本文采用等效控制加趋近律的方法能削弱抖振[4],采用这种方法时总的控制律为

对于连续滑模变结构控制,常用的趋近律为指数趋近律

针对本离散系统将其离散化,得到指数趋近律为:

其中ξ>0,q>0,1-qT>0,T为采样周期
由式7得,

将式14带入式13得,

当[CB]满秩时,有

得出

其中s′=-qTs(k)-ξTsgn(s(k))]是趋近阶段的控制率。
可达性和稳定性证明:

所以设计满足可达性条件[5]
定义Lyapunov函数

由式7得,

要使s(k+1)2-s(k)2<0,只要(CBusw)2<-2s(k)CBusw此时所设计的滑动模态满足稳定性条件[6]。
2.3 模糊控制器设计
变结构控制系统对系统参数和外部扰动的不变性是其突出优点[7],然而由于时间上得延迟、空间上的滞后以及系统模型的简化等原因,导致系统进入滑模面后并不是严格的按照滑模曲线滑动,而是一种沿着滑模曲线的抖振动运动,抖振是滑模结构控制的一个明显的缺点。基于上述思想,设计一模糊控制器消弱系统的抖振,提高控制品质[8]。
在采样时间固定的条件下,ξ的值决定了控制器抖振的幅度。取ξ为模糊控制系统的输出fs(k)的绝对值[9]:

设计二输入单输出模糊控制器,取切换函数s(k)及其变化率ds(k)作为输入,变化范围为[-3,3],fs(k)作为输出,变化范围为[-3,3][10]。
3 仿真结果分析
比较模糊滑模控制和滑模控制的控制性能,用Matlab进行仿真,对控制对象进行研究。
控制对象传递函数为


图3 模糊滑模控制仿真结果Fig.3 simulation results of fuzzy sliding mode control
4 结论
本发明基于模糊滑模变结构的海洋生物酶沉降离心流量控制器的核心部件为模糊滑模变结构控制运算模块,该模块的作用为:所述的DSP模块输出流量传感器下一时刻的位置指令r(k),所述流量传感器探测并输出当前流量的位置信号x(k),经过该模块的运算得到该模块输出的控制信号u(k)。传统的模糊控制器设计不依靠被控对象的模型,而是依靠专家或操作者的经验知识,其不便于控制参数的自我学习和调整,因而难以保证控制系统的稳定性。本发明采用模糊控制与滑模变结构控制相结合,提高了控制系统的抗干扰能力,克服由于外界扰动而引起控制系统不稳定;控制精度和响应速度得到了相应提高;模糊控制[11]规则大大减少,系统更易操作;同时由于模糊控制的引入滑模控制的抖振问题也得到了很好的削弱。
[1]陈 蕴.卧式螺旋沉降离心机的螺旋输送器[J].化工设备技术,1994(2):24-31.
[2]朱湘临,刘叶飞,孙 谧.海洋微生物酶反应器只能控制系统的研制[J].农业工程学报,2010(9):91-94.
[3]杨有涛.流体力学理论在流量计量中的应用[J].工业计量,2008(4):35-38.
[4]王丰尧.滑模变结构控制[M].北京:机械工业出版社,1995.
[5]刘金琨.滑模变结构控制MATLAB 仿真[M].北京:清华大学出版社,2005.
[6]廉小亲.模糊控制技术[M].北京:中国电力出版社,2003.
[7]胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.
[8]汤兵勇.模糊控制理论与应用技术[M].北京:清华大学出版社,2002.
[9]姚琼荟,黄继起,吴汉松.变结构控制系统[M].重庆:重庆大学出版社,1995.
[10]石辛民,郝整清.模糊控制及其Matlab 仿真[M].北京:清华大学出版社;北京交通大学出版社,2008.
[11]齐东明,陈照章,朱湘临.生物发酵过程智能控制系统的设计与实现[J].中国酿造,2009,28(9):113-117.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
中国惯性技术学报(2019年6期)2019-03-04
中国盐业(2018年20期)2019-01-14
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
电子制作(2016年21期)2016-05-17
北京航空航天大学学报(2016年4期)2016-02-27
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
