高铁车载ATPATP制动控车模式曲线计算方法的研究
2013-05-08 09:08卫和君
铁路通信信号工程技术 2013年1期
卫和君
(北京全路通信信号研究设计院有限公司,北京 100073)

卫和君,男,毕业于长沙铁道学院,高级工程师,专业设计部经理。主要研究方向包括信号系统运输能力分析与计算,曾参与既有线提速综合检测技术的试验研究—时速200公里动车组追踪间隔时间的研究及检算,列车牵引计算与闭塞分区划分CAD软件开发,中国铁路提速工程成套技术与装备、武广客运专线、京沪高速铁路等工程设计等项目。
近年来,我国高速铁路的建设处于高速发展阶段,为了确保高速列车的运行安全,CTCS-3级和CTCS-2级列控系统被广泛运用于我国客运专线上。在这些列控系统中,确保高铁运行安全的关键技术是车载ATP制动控车模式曲线的计算模型。它设计的好坏直接关系到列车运行安全和效率,所以它是车载ATP设备厂家和运营部门关注的焦点,也是车载ATP设备的核心技术。
1 现状
我国高铁线路上,目前CTCS-3级列控系统车载型号有300T、300S和300H。300T型由通号院有限公司与庞巴迪公司联合研发制造;300S型和300H型分别由意大利安萨尔多公司和日本日立公司联合和利时集团研发制造。为了使车载计算机快速计算不同坡道组合下的制动控车模式曲线,这3种型号的车载ATP嵌入的制动控车模式曲线计算方法大致可以归纳为以下两种:
第一种:根据国际铁路联盟(UIC)制定的UIC544-1标准,研制开发的计算模型(以下简称“欧标计算法”)。
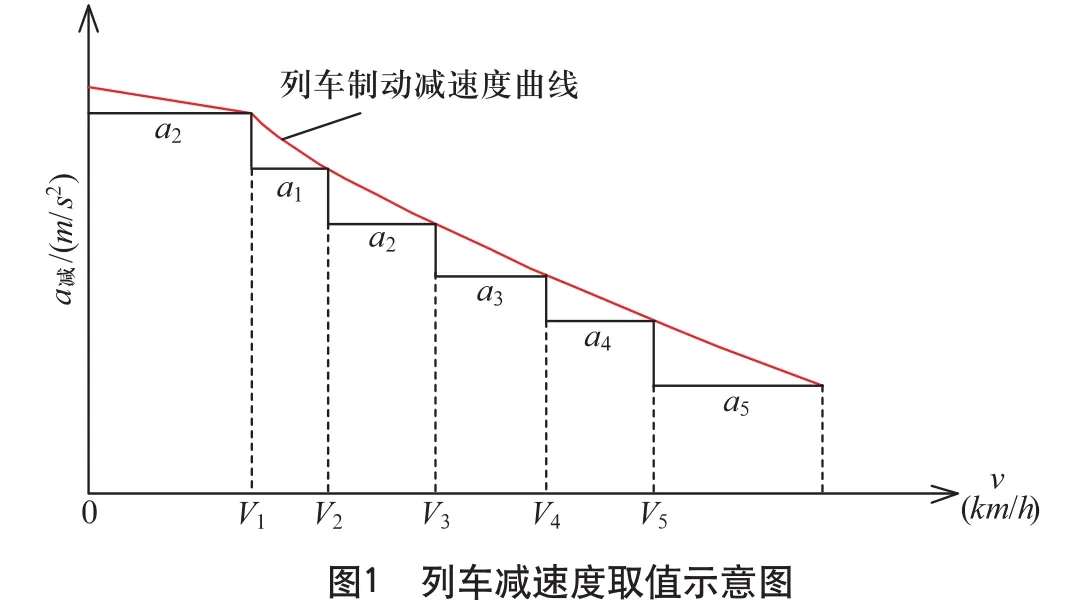
为了计算简单快捷,将列车的整个制动过程中的实际减速度近似划分为(最多)6个阶梯,每个阶梯对应一个固定的减速度,如图1所示,阶梯固定减速度a0、a1、a2、a3、a4、a5),通过动力学公式按照实际线路坡道近似计算出制动控车模式曲线。
第二种:采用日立公司研制开发的计算方法(以下简称“日立计算法”)。
方法是:预先在车载计算机里储存几档(如:-20‰、-10‰、-5‰、0‰、5‰、10‰六挡)坡度下的制动曲线表。当列车在运行中,车载接受到地面应答器上传的坡道信息后,把线路坡度归纳到储存的坡度档上,并到相应坡度档的制动曲线表中进行查表计算,得出制动控车模式曲线,具体如图2所示。
2 存在的问题
列车制动控制模式曲线区域分为两个部分:一部分为按照固定模式限速值监控列车运行的区域,以下简称为“恒速区”;另一个部分为列车在减速地点前从恒速区开始下降直至目标点的运行区域,以下简称为“制动区”。

在“恒速区”,根据铁道部颁布的《铁路客运专线技术管理办法》(试行)本的规定:列车在完全监控模式下,按高于允许速度2 km/h报警、5 km/h常用制动、10 km/h紧急制动(250 km/h以下)或15 km/h紧急制动(250 km/h及以上)设置。该规定已经明确了在恒速区内的制动报警、常用制动和紧急制动3种控制速度的取值,大家只需要遵守执行。
在“制动区”,当已知列车停车点、列车至停车点距离内的线路坡道的条件下,可以用动力学公式由停车点开始向列车位置推算列车制动初速度。但由于列车在制动过程中产生的减速度是随着速度变化而变化,不是一个常数。所以,在推算中,要通过积分方程进行计算。另外,由于列车在“制动区”内,线路是由不同坡道组成的,在推算过程中还需要用试凑方式计算各个变坡点的速度。
为此,各个车载ATP设备厂商为了避开其复杂的计算,研究开发了适合各自车载计算机的计算方法,导致我国高铁线路上,出现了“欧标计算法”和“日立计算法”两种方法。
“欧标计算法”把列车的减速度进行了归类并在各个速度段上赋予了一个不变的减速度值。虽然它简化了计算,减轻了车载计算机的一部分计算量,满足了时效性强的要求,但计算出来的制动限速的富余量不均匀,导致设置高效率的曲线比较困难。
“日立计算法”通过查表计算,减少了车载计算机的计算量,提高了计算速度。但得出的制动限速的安全余量不同。如:按照上述六档坡度预存制动曲线表后,线路坡度为-11‰和-19‰时,都按照-20‰查表计算限速,其安全余量明显不一。所以,要设置高效率的制动控车模式曲线只能依靠增加输入制动曲线表来实现,但增加制动曲线表又受到了车载计算机的容量限制。
因此,针对“欧标计算法”和“日立计算法”中存在的缺陷,经过研究提出了以下计算方法。
3 计算方法
我们知道:列车制动距离Sz由制动空走距离Sk和制动有效距离Se组成,它可以用公式(1)和(2)表示。

式中:
V0:列车制动初速度;km/h;
V1、V2:速度间隔的始端速度和末端速度,km/h;
tk:列车制动空走时间,s;
a1-2减:列车在当时坡道上由V1变化到V2的过程中运行减速度的平均值,m/s2。
在公式(2)中,列车在运行中产生的减速度一方面主要与列车本身制动力产生的减速度有关,另一个方面还与坡道有关。因此,当遇到不同坡道组合时,不仅要采用分段计算列车制动有效距离,还需要采用试凑法求出变坡点的速度值,这些计算对于车载计算机来说过于复杂。为了简化这部分的计算,提出将不同坡道通过计算公式统一转化为一个虚拟坡道,然后,在这个虚拟坡道上查表计算制动控制速度。具体步骤如下。
1)车载计算机离线状态下,针对动车组的性能,研究确定将实际坡道转化为虚拟坡道的计算公式,同时计算在虚拟坡道上的紧急制动有效距离表、常用制动有效距离表、紧急制动控车模式曲线表、常用制动控车模式曲线表和制动报警模式曲线表。并将确定的计算公式和5张制动距离表植入车载计算机里。
2)车载计算机在线运行时,根据设备接收的坡道信息,将不同坡道统一计算到一个虚拟的坡道上,再通过5张制动距离表查表求出当前列车位置的紧急制动控制速度、常用制动控制速度和制动报警速度。
3)把实际的运行速度与计算得出的制动控制速度相比较:如果超过紧急制动控制速度,则触发紧急制动系统;如果未超过紧急制动控制速度,但超过常用制动控制速度,则触发常用制动系统;如果未超过常用制动控制速度,但超过制动报警速度,则触发制动报警系统。
该计算方法使大量的计算工作由人工在车载计算机离线状态下完成,在实际运行时,车载计算机只需要通过简单的查表计算就能计算出列车制动控制速度。
4 计算模型
要实现以上计算方法,需要研究出将不同的线路坡道转化为统一的虚拟坡道的计算模型;研究出在虚拟坡道上推算制动报警、常用制动和紧急制动三条控制模式曲线的计算模型。
4.1 计算虚拟坡道的模型
列车在运行中,车载接受到地面应答器上传的坡道信息后,计算机将这些线路坡道转化为统一的虚拟坡道,求出列车距离停车点或行车受限点的虚拟长度。其实际坡道长度转化为统一的虚拟坡道总长度的计算公式为:

式中:
f(train,ii,li):实际坡道长度转化为虚拟坡道长度的函数公式,它与列车制动性能、坡度和坡长有关;
ii:第i个坡道的坡度,‰。
li:第i个坡道的坡长,m。
在确定将实际坡道转化为统一的虚拟坡道的计算公式时,计算列车在虚拟坡道上的紧急制动有效距离表和常用制动有效距离表。
4.2 计算制动报警模式曲线的模型
1)计算紧急制动报警模式曲线的模型
根据紧急制动有效距离曲线的最高速度Vje_max及在其速度至速度Vje_i段的平均减速度aj-、ATP触发制动的报警时间Tb、常用制动模式曲线与紧急制动模式曲线之间余量间隔时间Ty、ATP触发紧急制动系统的延迟时间Tjst、ATP切断牵引时间Tqd和列车紧急制动空走时间Tjk,推导紧急制动报警速度Vjb_i的计算图如图3所示。

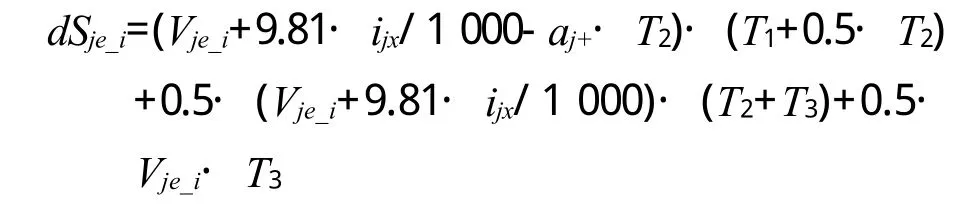
根据图3,在列车紧急制动有效距离曲线上,列车速度由Vje_max到Vjb_i时,列车制动运行的距离为 dSje_i,则 :

为了简化推导公式,在上式中和以下涉及的速度单位均为m/s、时间单位均为s、加减速度单位均为m/s2。

经过整理:

其中:aj+为T2时间内的平均加速度,但考虑到计算方便,其加速度按照速度Vje_max至Vje_max-10 km/h之间的平均加速度进行取值,以下同。
将(6)、(7)式代入(5)得出:
经过整理得出:

设:

上式可以写成:

将上式代入(7)式,得出紧急制动报警速度:

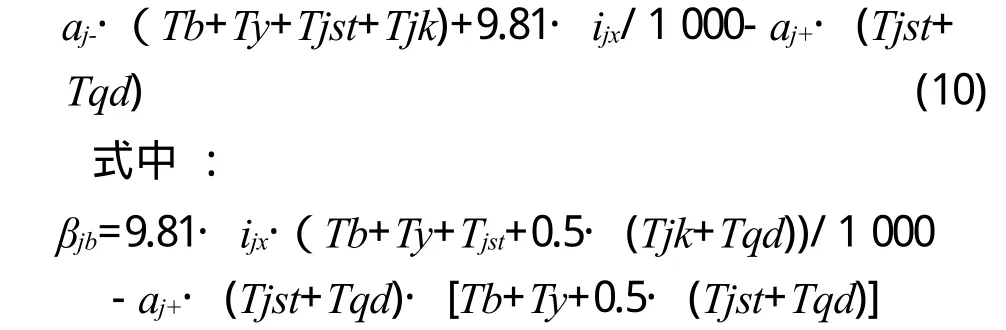
根 据 图 3, 将 T1=Tb+Ty、T2=Tjst+Tqd、T3=Tjk-Tqd代入上式(9)得出紧急制动报警速度:

2)计算常用制动报警模式曲线的模型
根据常用制动有效距离曲线的最高速度Vce_max及在其速度至速度Vce_i段的平均减速度ac-,ATP触发制动的报警时间Tb、ATP触发常用制动系统的延迟时间Tcst、ATP切断牵引时间Tqd和列车常用制动空走时间Tck,推导常用制动报警速度Vcd_i的计算图如图4所示。

根据图4并结合公式(9)可以得出常用制动报警速度Vcb_i的计算公式:

其中:ac+为T2时间内的平均加速度,但考虑到计算方便,其加速度按照速度Vce_max至V2ce_max-10 km/h之间的平均加速度进行取值,以下同。
根据图4,将T1=Tb、T2=Tcst+Tqd、T3=Tck-Tqd代入上式(11)得出常用制动报警速度:
3)制动报警模式曲线计算模型
通过公式(10)和公式(12)的计算,列车触发制动系统的报警速度Vb-i取两个计算值和制动报警限速的最小值,即:

式中:Vbx为制动报警限速值。
4.3 计算常用制动模式曲线的模型
1)根据紧急制动有效距离曲线的速度Vje_max及在其速度至速度Vje_i段的平均减速度aj_、常用制动模式曲线与紧急制动模式曲线间余量时间Ty、ATP触发紧急制动系统的延迟时间Tjst、ATP切断牵引时间Tqd和列车紧急制动空走时间Tjk,由紧急制动曲线推导的常用制动模式曲线速度Vjc_i的计算图如图5所示。

根据图5并结合公式(9)可以在紧急制动距离曲线的基础上,推导出常用制动模式曲线速度Vjc_i的计算公式:

2)根据常用制动有效距离曲线的速度Vce_max及在其速度至速度Vce_i段的平均减速度ac-、ATP触发常用制动系统的延迟时间Tcst、ATP切断牵引时间Tqd和列车常用制动空走时间Tck,由常用制动推导的常用制动模式曲线速度Vcc_i计算图如图6所示。
根据图6并结合公式(9)可以在常用制动距离曲线的基础上,推导出常用制动模式曲线的速度Vcc_i的计算公式:

将 T1=0、T2=Tcst+Tqd、T3=Tck-Tqd代入式(16)得出:

3)通过公式(15)和公式(17)的计算,列车常用制动模式曲线速度Vc_i取两个计算值和常用制动控制曲线限速的最小值,即:

式中:Vcx为常用制动控制曲线的限速值。
4.4 计算紧急制动模式曲线的模型
根据紧急制动有效折算距离曲线的速度Vje_max及在其速度至速度Vje_i段的平均减速度aj-、ATP触发紧急制动系统的延迟时间Tjst、ATP切断牵引时间Tqd和列车紧急制动空走时间Tjk,推导紧急制动控制模式曲线速度Vjj_i计算图如图7所示。

根据图7并结合公式(9)可以得出紧急制动模式曲线速度Vj_i的计算公式:

根据图7,将T1=0、T2=Tjst+Tqd、T3=Tjk-Tqd代入上式(19)得出紧急制动控制模式曲线速度Vj_i的计算公式:

图8 制动模式曲线推导图
5 计算实例
我们以CRH380AL为例,当最高运行速度和车载相关参数设定如表1所示时,当虚拟坡道在紧急制动和常用制动模式曲线推导中都采用平道时,CRH380AL动车组紧急制动模式曲线、常用制动模式曲线和制动报警曲线推导图如图8所示。

表1 CRH380AL车载设备相关参数表表1 TSRS间非提示类限速状态判定表

图8 制动模式曲线推导图
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年4期)2022-08-17
汽车实用技术(2022年10期)2022-06-09
露天采矿技术(2022年1期)2022-02-20
铁道通信信号(2020年8期)2020-02-06
中国眼镜科技杂志(2019年9期)2019-11-11
汽车维修与保养(2019年3期)2019-06-19
宇航学报(2019年5期)2019-06-05
高中生学习·高二版(2017年9期)2017-10-25
中国公共安全(2017年11期)2017-02-06