鱼雷自导性能分布式仿真中的作战环境建模
2013-05-28 08:01张勇平张静远尹文进
水下无人系统学报 2013年5期
张勇平, 张静远, 尹文进
鱼雷自导性能分布式仿真中的作战环境建模
张勇平, 张静远, 尹文进
(海军工程大学 兵器工程系, 湖北 武汉, 430033)
为了在鱼雷自导性能仿真中体现真实作战环境对鱼雷自导的影响, 从鱼雷自导系统与外界的信息交互出发, 通过分析鱼雷自导探测目标机理和工作过程, 结合分布式仿真技术, 建立了鱼雷自导性能分布式仿真中的复杂海洋环境和对抗作战仿真模型。仿真结果表明, 所建模型合理有效, 可以体现鱼雷自导工作的真实环境。
鱼雷; 自导性能; 海洋环境; 作战环境; 分布式仿真
0 引言
开展鱼雷自导性能仿真研究是检验和提升鱼雷自导性能的重要途径之一, 鱼雷的作战环境决定了仿真研究必须综合考虑复杂海洋环境和对抗作战条件[1]。因此, 有针对性的开展鱼雷作战环境的建模研究对鱼雷自导性能仿真的发展有重要意义。现有海洋环境声学模型理论性较强, 仿真计算比较困难, 必须结合鱼雷声自导探测目标的机理对其进行改造或者重新建模。对抗作战条件是鱼雷作战环境的重要部分, 仿真模型必须结合鱼雷自导搜索、水声反对抗的机理展开研究。
目前, 国内相关领域的科研人员对鱼雷作战使用、效能分析和自导系统数字仿真技术的研究较多[2-5], 但针对鱼雷自导性能研究的海洋和对抗作战环境的仿真建模研究较少。本文从分析鱼雷自导探测目标的机理出发, 对鱼雷自导系统与环境的信息交互进行了深入的分析, 结合分布式仿真技术, 提出了复杂海洋环境和对抗作战条件的仿真模型。并在鱼雷自导性能分布式仿真系统中对所建仿真模型进行了仿真验证。
1 自导性能仿真影响因素
无线电波、激光等物理场在海水中的衰减很快, 无法满足水下远距离探测的需求。声传播在海水中的衰减较慢, 而且传播速度在1 500 m/s左右, 是目前水下通信和探测目标唯一有效的物理场。鱼雷被动探测目标是采用接收目标的辐射噪声信号进行的, 以被动声纳方程为判断依据, 见式(1)。主动探测目标是采用接收自导声纳发射的脉冲信号经过目标反射的回波信号来进行检测的, 以主动声纳方程作为判断依据, 见式(2)。


式(1)中:为目标的辐射噪声;为传播损失;为水听器处的噪声级;为声纳的指向性;为检测阈。式(2)中:为声纳发射声源级;为混响级; 其他与式(1)相同。
复杂海洋信道使被动探测的目标辐射信号、主动探测的声纳发射信号与目标回波信号发生衰减和畸变, 海洋中气泡和浮游生物等对主动自导造成体积混响, 海杂波和海底介质分别造成海面混响和海底混响。因此鱼雷自导接收机必须要有相应的抗信号畸变、抗混响和提取目标特征等信号处理方法。在进行鱼雷自导性能分布式仿真时, 海洋环境模型必须体现信号衰减和混响等因素。
鱼雷作战过程中, 气幕弹对被动自导的目标辐射信号、主动自导脉冲信号和目标回波信号造成插入损失; 噪声干扰器提高了背景噪声, 抑制了自导接收机对信号的接收; 诱饵采用模拟目标的运动和声学特征来欺骗鱼雷跟踪。水声对抗器材的不同战术用法会对鱼雷自导造成不同的影响, 因此, 为了识别和对抗敌方释放的气幕弹、噪声干扰器和诱饵, 鱼雷自导系统必须要有一定的目标识别和水声反对抗能力。在进行鱼雷自导性能分布式仿真时, 除了目标机动外, 对抗作战模型还必须体现水声对抗器材作战使用对自导工作过程的影响。
2 自导系统与外界的信息交互
自导系统在海水电池激活后开始工作, 鱼雷的射击参数在发射前由发射平台的指控系统装定到鱼雷上。在进行鱼雷自导性能分布式仿真时, 鱼雷成员激活后首先必须接收发射平台的射击参数信息。被动自导开机后, 载有目标方位、特征等信息的辐射噪声信息经过海洋信道被鱼雷自导系统接收。主动开机后, 鱼雷自导声纳信号经过海洋信道照射到目标后, 载有目标方位、特征等信息的反射信号被自导接收机接收。
2.1 自导系统与海洋环境的信息交互
海洋环境是鱼雷探测目标的水声信道, 主要对目标辐射噪声信号、主动声纳信号和目标回波信号造成衰减、畸变等影响。复杂海洋环境对信号的影响主要体现在传播损失、多途效应、海面混响、海底混响和体积混响等几个方面。在进行鱼雷自导性能分布式仿真时, 自导探测的计算模型必须考虑上述因素, 模型中有关涉及到海洋环境的参数可以由数据库读取或导演成员统一发布, 鱼雷成员接收的环境参数作为上述声学模型计算的依据。涉及到模型计算的海洋环境参数主要有海面风速, 海面风向, 海水盐度、深度、温度、温度梯度, 海底类型等。
2.2 自导系统与目标的信息交互
鱼雷自导系统被动检测时, 检测到的目标辐射噪声信息载有目标的方位、深度、辐射水平、线谱成分和其他特征信息。提取这些信息可以进行方位估计、目标识别等操作。
主动检测时, 鱼雷自导系统发射一定时宽和带宽的脉冲信号。该信号经过海洋信道到达目标, 经过目标反射后, 载有目标方位、距离、速度和其他特征信息的回波信号经由海洋信道被自导系统接收[1]。
综上所述, 在进行鱼雷自导性能分布式仿真时, 鱼雷成员必须把发射脉冲信息、鱼雷位置和速度信息公布给其他目标及对抗器材成员, 目标及对抗器材成员必须把位置和方位信息、速度信息、辐射噪声水平、目标强度和其他一些特征信息公布给鱼雷。鱼雷成员与外界的信息交互关系见图1。

图1 鱼雷与外界信息交互图
3 仿真模型
3.1 复杂海洋环境模型
对鱼雷自导性能受海洋环境的影响进行精确建模分析是非常困难的, 基于本文研究的目的, 以对自导性能产生主要影响为考虑原则, 这里对其作简化处理, 主要考虑声速、声吸收、海底混响、海面混响、体积混响等几个方面[4]。其中, 声速的计算采用如下计算模型[6]

式中:为声速;为温度;为盐度(以每千克海水中含各种盐类克数计);为深度。
该模型中涉及到3个环境变量, 温度、盐度和深度。表示海水对声波吸收程度的对数吸声系数按如下模型计算[7]
式中:为温度;为盐度(以每千克海水中含各种盐类克数计);为工作频率;f为豫弛频率, 有

为与海水温度有关的系数, 有

传播损失采用下式计算模型[8]

体积混响采用如下计算模型[4]

海面和海底混响由于散射体的分布是2D平面的, 统称为界面混响。界面混响级采用如下计算模型



根据上述声速、声吸收、海底混响、海面混响和体积混响计算模型的参量分析, 只要给出温度、盐度、风速、海底类型这几个环境变量就可以体现复杂海洋环境对鱼雷自导的影响。
3.2 对抗作战模型
模拟实际对抗作战环境需要考虑鱼雷的作战使用、目标的机动规避和敌方水声对抗3个方面。鱼雷的作战使用需要考虑鱼雷射击提前角的计算、自导开机距离的设定、齐射时展开航程的设定、发射方式的选择等。其中, 射击提前角和展开航程的计算模型[2]见式(12)和式(13)。自导开机距离和发射方式一般由人工设定。
形心法计算发射提前角模型
展开航程计算模型
以典型的鱼雷对潜攻击为例, 潜艇被动声纳不能测距, 只能听测其相对于本艇的方位。其机动规避战术主要有变速、变深、旋回和停车等。为充分体现潜艇旋回角度的随机性, 结合潜艇作战使用行动规则, 仿真设计了3种不同的机动方式。
机动方式1: 潜艇背雷转90°, 机动后航向为以旋回90°后的方向为中心, 均方差为10°的正态分布。

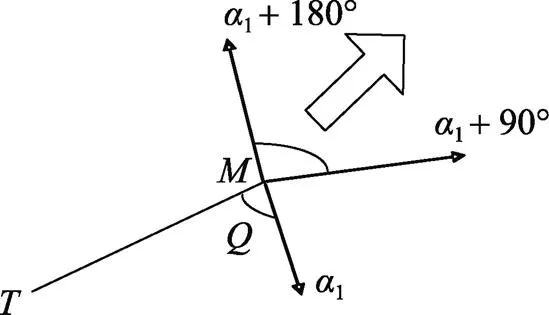
图2 潜艇机动规避模式一

图3 潜艇机动规避模式二
机动方式3: 潜艇将鱼雷甩到尾部, 机动后航向为以鱼雷-潜艇视线方向为中心, 均方差为10°的正态分布。
敌方的水声对抗是和机动规避结合在一起的, 以典型的潜艇反鱼雷水声对抗为例进行讨论。潜艇使用水声对抗器材对抗来袭鱼雷的作战使用原则是隐蔽自己、欺骗和干扰鱼雷自导探测、增加鱼雷航程消耗[9]。其作战使用方式较多, 考虑到鱼雷自导性能仿真的需求, 现建立诱饵、噪声干扰器和诱饵组合使用以及噪声干扰器和气幕弹组合使用3种水声对抗模型, 以体现敌方水声对抗对鱼雷自导性能的影响。
3.2.1 诱饵对抗模型


图4 诱饵作战使用示意图

3.2.2 诱饵和噪声干扰器组合使用对抗模型

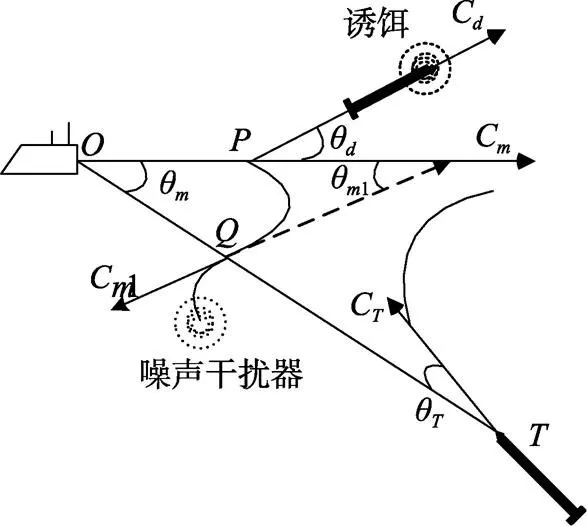
图5 诱饵/噪声干扰器组合使用示意图
3.2.3 噪声干扰器和气幕弹组合使用对抗模型

图6 气幕弹/噪声干扰器组合使用示意图
4 仿真实例
在基于上述海洋环境模型和对抗作战模型的鱼雷自导性能分布式仿真系统中, 以水面舰艇齐射鱼雷攻击单艘潜艇, 潜艇采用发射噪声干扰器和诱饵的自动对抗方案进行反鱼雷对抗为例进行了仿真验证。仿真中鱼雷在齐射展开后经过一段时间发现目标, 潜艇探测到来袭鱼雷后发射噪声干扰器和诱饵进行反鱼雷对抗, 同时, 自身开始机动规避, 对抗态势见图7。当鱼雷被诱饵诱骗后, 1号鱼雷穿过诱饵后发现潜艇目标, 继而跟踪并命中目标, 2号鱼雷穿过诱饵后未发现目标开始环形搜索, 对抗态势见图8。

图7 对抗态势图一

图8 对抗态势图二
5 结束语
本文从鱼雷自导探测目标的原理出发, 对自导系统与外界的信息交互进行了深入的研究; 结合自导探测目标机理、海洋环境模型、鱼雷自导性能仿真需求和特点、分布式仿真技术等, 提出了鱼雷自导性能分布式仿真的复杂海洋环境和对抗作战仿真模型; 并在鱼雷自导性能分布式仿真系统中对所建仿真模型进行了仿真验证, 仿真结果验证了模型的有效性和正确性。该仿真模型全面考虑了水声环境计算模型、目标机动和水声对抗等影响鱼雷自导性能的综合因素, 这对研究鱼雷自导性能、建设粒度更细更复杂的鱼雷作战效能评估系统具有较大的参考价值。另外, 这对研究智能水雷、反鱼雷鱼雷等水下武器的作战性能仿真具有一定的借鉴意义。
[1] 聂卫东, 康凤举, 苏颖, 等. 鱼雷声自导检测目标过程的建模与实时仿真[J]. 计算机仿真, 2005, 22(6): 57-60.Nie Wei-dong, Kang Feng-ju, Su Ying, et al. Modeling and Real-time Simulation of Torpedo Acoustic Homing Process[J]. Computer Simulation, 2005, 22(6): 57-60.
[2] 卜广志, 张宇文. 鱼雷武器系统作战效能的仿真方法研究[J]. 鱼雷技术, 2002, 10(2): 32-35. Bu Guang-zhi, Zhang Yu-wen. A Study of Simulation Method of Operational Effectiveness for Torpedo Weapon System[J]. Torpedo Technology, 2002, 10(2): 32-35.
[3] 张培培, 杨大伟. 鱼雷武器系统作战效能方法研究[J]. 舰船科学技术, 2010, 32(6): 76-78. Zhang Pei-pei, Yang Da-wei. Research on Operational Effectiveness System of Torpedo Weapon System[J]. Ship Science and Technology, 2010, 32(6): 76-78.
[4] 张静远. 鱼雷作战使用与作战能力分析[M]. 北京: 国防工业出版社, 2005, 5-47.
[5] Dagenais V, Mcgaughey D R, Pecknold S. Improved Torpedo Range Estimation Using Modified Fast Orthogonal Search Techniques[C]//Oceans 2008. Quebec City: IEEE, 2008: 1-7.
[6] Medwin H. Speed of Sound in Water for Realistic Para- meters[J]. The Journal of the Acoustical Society of Ame- rica, 1975, 58(6): 1318-1319.
[7] Urick R J. 水声原理[M]. 哈尔滨: 哈尔滨船舶工程学院出版社, 1990.
[8] 周德善, 李志舜, 朱邦元. 鱼雷自导技术[M]. 北京: 国防工业出版社, 2009.
[9] 陈春玉, 张静远, 王明洲, 等. 反鱼雷技术[M]. 北京: 国防工业出版社, 2006.
Operational Environment Modeling in Distributed Simulation of Torpedo Homing Performance
ZHANG Yong-ping, ZHANG Jing-yuan, YIN Wen-jin
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
To reflect real operational environment in distributed simulation of torpedo homing performance, starting from the information interaction analysis of torpedo homing system and outside environment, the mechanism and guiding process of detecting targets are analyzed. And the models of complex marine environment and countermeasure are established for distributed simulation of torpedo homing performance with the distributed simulation technology. Simulation results show that these models are reasonable and effective for reflecting the real environment where a torpedo homing system works.
torpedo; homing performance; marine environment; operational environment; distributed simulation
TJ630.34; TP391.9
A
1673-1948(2013)05-0392-06
2013-04-27;
2013-06-16.
张勇平(1979-), 男, 工程师, 在读博士, 主要研究方向为鱼雷自导技术、水声信号处理、系统仿真.
(责任编辑: 许 妍)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
智能计算机与应用(2021年5期)2021-10-05
哈尔滨工程大学学报(2021年3期)2021-05-08
科技传播(2019年21期)2019-11-12
舰船电子工程(2018年11期)2018-11-26
剧作家(2018年2期)2018-09-10
军事运筹与系统工程(2017年1期)2017-07-31
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02