机载重轨干涉合成孔径雷达的发展
2013-07-25 02:43钟雪莲向茂生郭华东陈仁元
雷达学报 2013年3期
钟雪莲*① 向茂生② 郭华东③ 陈仁元①
机载重轨干涉合成孔径雷达的发展
钟雪莲向茂生郭华东陈仁元
(中国电子科技集团第三十八研究所 合肥 230088)(中国科学院电子学研究所 北京 100190)(中国科学院遥感与数字地球研究所 北京 100094)
机载重轨干涉合成孔径雷达(Interferometric Synthetic Aperture Radar, InSAR)以其系统的灵活性、机动性以及测量的高精度在很大程度上克服了星载重轨干涉SAR重访周期长、分辨率低的问题,在滑坡、火山、地震等地表活动的监测中具有不可替代的作用。该文首先详细回顾了机载重轨干涉SAR技术在国内外的发展历史和现状。然后在对机载重轨干涉SAR精度分析的基础上,对该技术在实际应用中存在的关键性问题进行了深入的分析,全面介绍了该领域相关的研究成果,并对机载重轨干涉SAR的应用前景和发展方向进行了展望。最后指出为提高参数反演的精确性还需要解决的问题。
机载;重轨;InSAR;DInSAR
1 引言
星载干涉SAR(InterferometricSynthetic Aperture Radar, InSAR)和差分干涉SAR (Differential InSAR, DInSAR)在地形测量和地表形变监测方面的理论研究已趋向成熟,正在向实用化的方向发展。但是,目前的星载SAR图像普遍存在分辨率低、重访周期长的情况,不满足对点状、线状等小面积地物,以及滑坡、泥石流、火山、地震等快速地表形变的监测要求。而机载SAR系统具有良好的机动性,能够在任何时间获取数据,而且它可以根据地物特性灵活地选择波段和飞行平台,并提供非常高的分辨率和测量精度。因此,机载SAR系统可以在很大程度上弥补星载SAR系统的不足。同时,机载SAR系统又可以作为星载SAR的试验平台,在星载SAR系统发射前进行一系列参数和算法的验证。
机载双天线InSAR系统虽然能够提供高精度的数字高程模型(Digital Elevation Model, DEM),但由于载机平台尺寸的限制,双天线InSAR系统的基线不可能很长,从而决定了它只能工作在波长较短的C波段或X波段(虽然GeoSAR系统是一个例外,它在飞机两翼的顶端分别安装了一个P波段天线,使得双天线干涉SAR的基线可以达到20 m,但此时需要考虑机翼顶端相对于机身的相对运动,增加了系统的难度)。对于植被覆盖茂密的森林地区,短波不能穿透植被到达地表,此时利用C或X波段双天线InSAR系统测得的是数字地表模型(Digital Surface Model, DSM),该模型附加了植被的高度信息。因此,如果需要测量这些地区高精度的数字地形模型(Digital Terrain Model, DTM),需要雷达工作在更长的波段范围内,如L或P波段,使得电磁波可以穿透植被到达地表。而为了达到与X或C波段同样的地形测绘精度,它们的基线需要相应地加长至几十米,甚至上百米。对于飞机平台来说,很难实现如此长基线的双天线InSAR系统。因此,对于植被茂密地区的地形测绘,通常采用重复轨道飞行的方式获取DEM。而利用机载SAR系统进行地表形变的监测,由于观测的时间必须不同,因此,机载DInSAR系统必然要使用重复轨道飞行进行干涉。利用工作在长波长的SAR系统进行形变监测,好处是反演的结果对载机的系统相位误差不敏感,而相应地,反演的精度也较低;而利用短波长的SAR系统进行形变监测时,虽然反演的精度高,但是系统的误差对结果的影响很大。因此,机载SAR系统进行地表形变监测时,通常选择适中的波长,如L波段。
由此可以看出,无论是机载InSAR还是机载DInSAR,重轨干涉总是不可缺少的。本文在详细回顾了机载重轨干涉SAR发展历程的基础上,指出该技术在信号处理中存在的关键问题,并详细介绍了相关的解决方法。最后,对它的应用前景和发展趋势进行了展望。
2 发展历史及现状
2.1 国外发展历史及现状
机载重轨干涉SAR最早可追溯到1990年8月Gray等人的X和C波段重轨干涉SAR试验,它验证了机载重轨干涉SAR获取地面高程和地表形变的可行性。随后,美、德、法、日等都相继开展了机载重轨干涉SAR试验,用于地形的测绘。但是,这些试验所得的结果都是很初步的,没有考虑地形、孔径以及导航系统的精度所造成的误差。2006年Reigber等人发表了TopoSAR系统P波段重轨干涉SAR获取DEM的结果。首次在DEM反演时考虑了成像和定位误差的影响,估计并补偿了由于导航系统精度限制而引起的残余运动误差,见图1。反演的DEM与激光雷达测高的结果进行比较,如图2所示,两者的差异在之间。
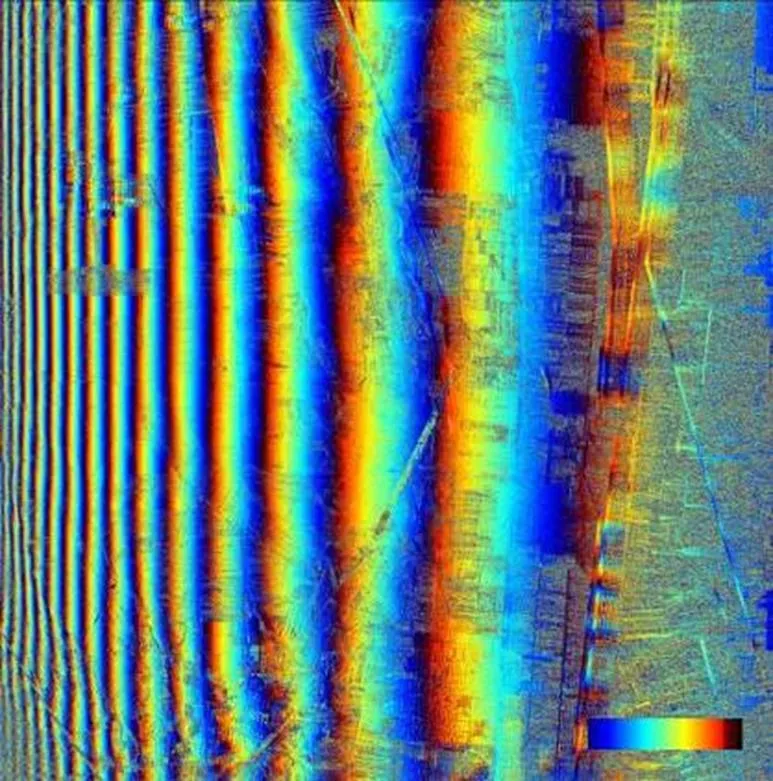
在机载差分干涉SAR试验上,德国宇航局(DLR)利用E-SAR系统在这方面做了很多工作。E-SAR是搭载在Dornier DO 228飞机上的多频(包含P-, L-, C-, X-波段,后添加S波段)SAR系统,装备了CCNS4/Aerocontrol导航系统,平台绝对定位精度为0.1 m,姿态角的测量精度为0.01°,实际航线可以控制在参考轨迹的5 m范围内。它的升级系统F-SAR也在逐步完成中,并将最终代替E-SAR系统。DLR的研究者们改进传统的星载差分干涉方法,建立了一套E-SAR系统差分处理流程,对L和C波段的数据作差分处理时,反演得到角反射器上的相对位移误差在1 mm左右。但干涉纹图中仍然存在明显的沿方位向的残余运动误差没有消除,影响地表形变绝对值的估计。2003年和2006年,DLR的E-SAR系统在瑞士阿尔卑斯山地区采集了Aletsch冰河的P, L, C以及X波段的SAR数据。其中,只有L和P波段采集了连续两天的数据可用于差分干涉处理。在考虑了残余运动误差和地表运动造成的配准误差的基础上(见图3),Prats等人利用L和P波段SAR数据反演出了该地区冰河的2维和3维速度场,如图4所示。并指出,L波段的精度比P波段好,能达到1-5 cm/天。DLR在长时序机载SAR差分干涉方面也进行了一些初步尝试。利用E-SAR系统于1998年采集的14幅L波段重轨干涉SAR图像,通过小基线技术获取了试验区在数据采集的两个半小时内的地表形变信息,见图5。从试验结果看,文中的处理方法不仅能够探测角反射器几厘米的位移,还能感知由于土壤湿度变化而引起的农田区域几毫米的形变。2013年,DLR还发表了一幅德国矿区的L波段机载DInSAR干涉结果(见图6)。两次数据采集的时间间隔为6个月,虽然间隔时间较长,但即使是在植被覆盖地区,相干性也非常好。
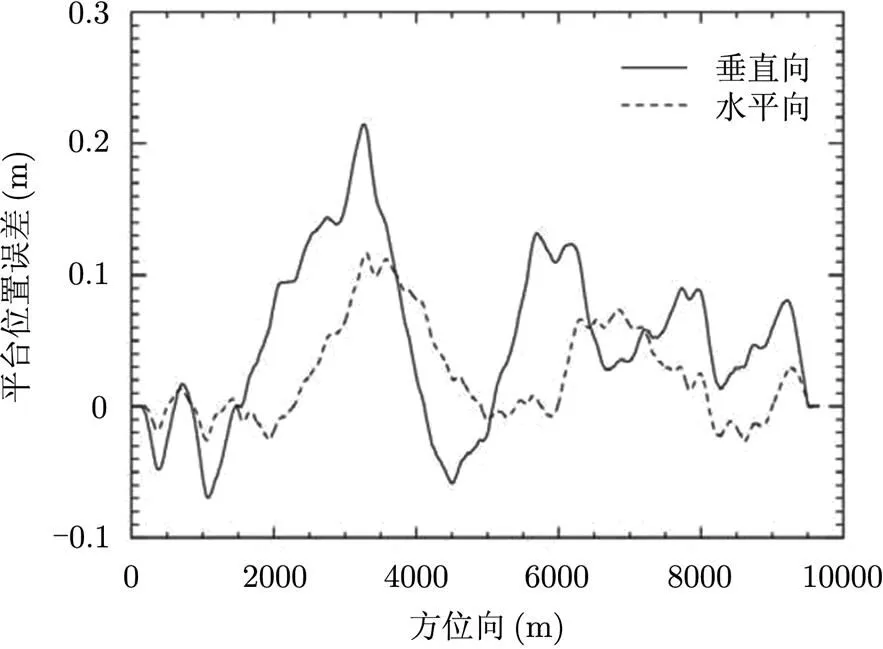
图1 P波段机载重轨干涉SAR估计的残余运动误差
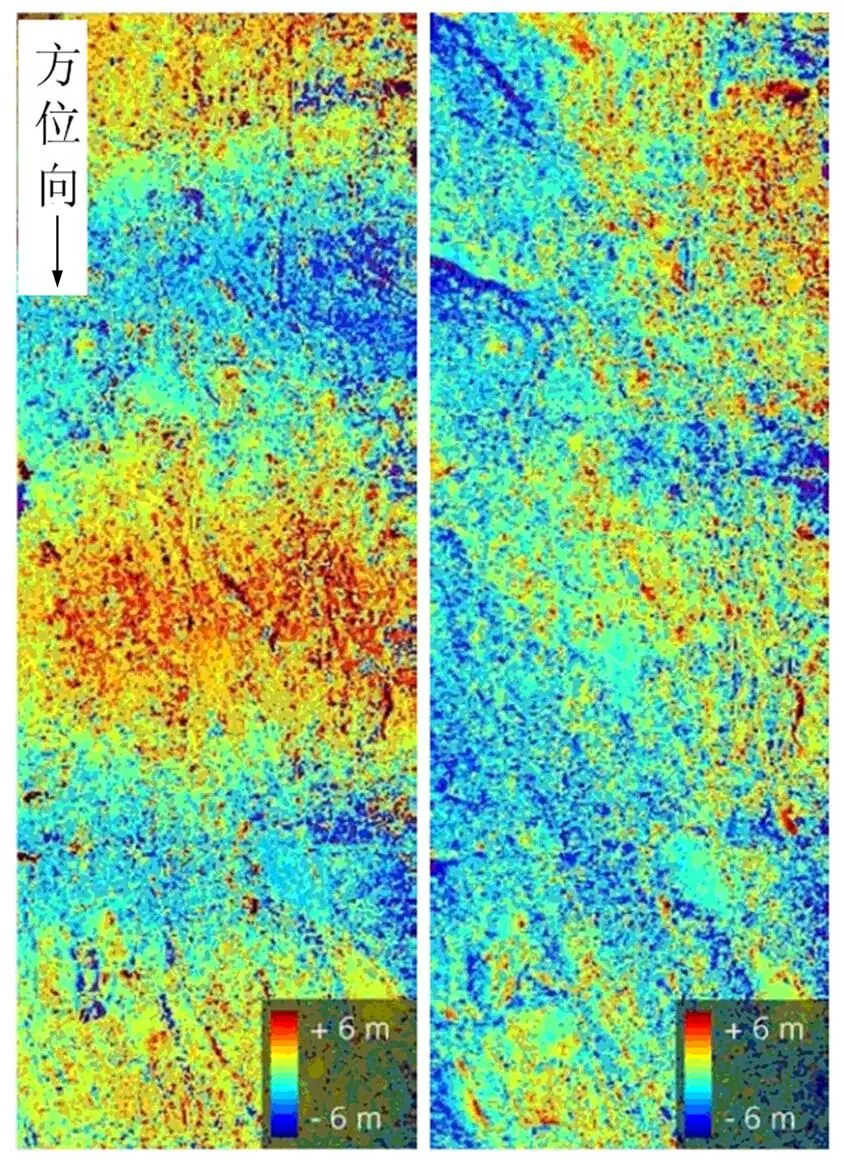
图2 P波段机载重轨干涉SAR获得的DEM与激光雷达测高数据的比较,左、右两图分别是去除残余运动误差前后的结果
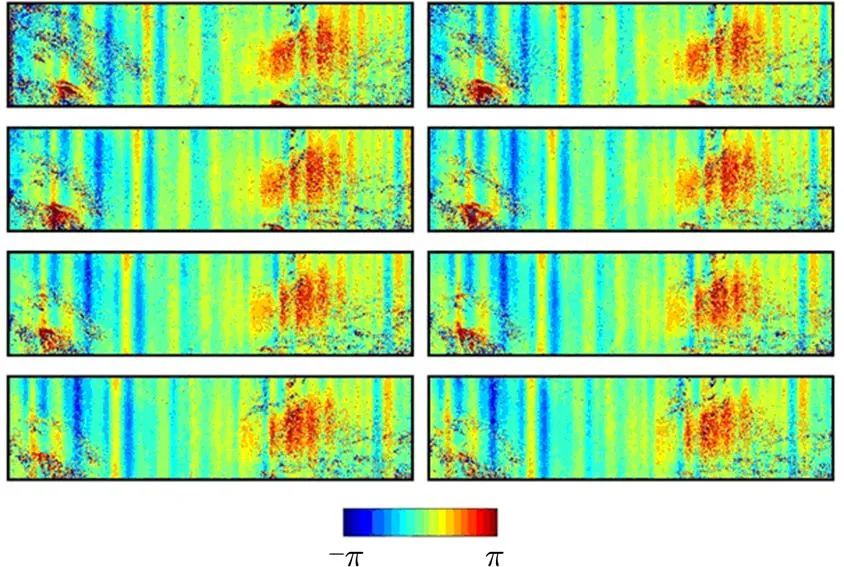
图3 L波段机载重轨干涉SAR纹图中基线误差随方位向变化的情况,竖条纹对应着基线误差的一阶导数,右侧大块红色地区是由于地表运动造成的配准误差,水平方向是方位向,垂直向是距离向
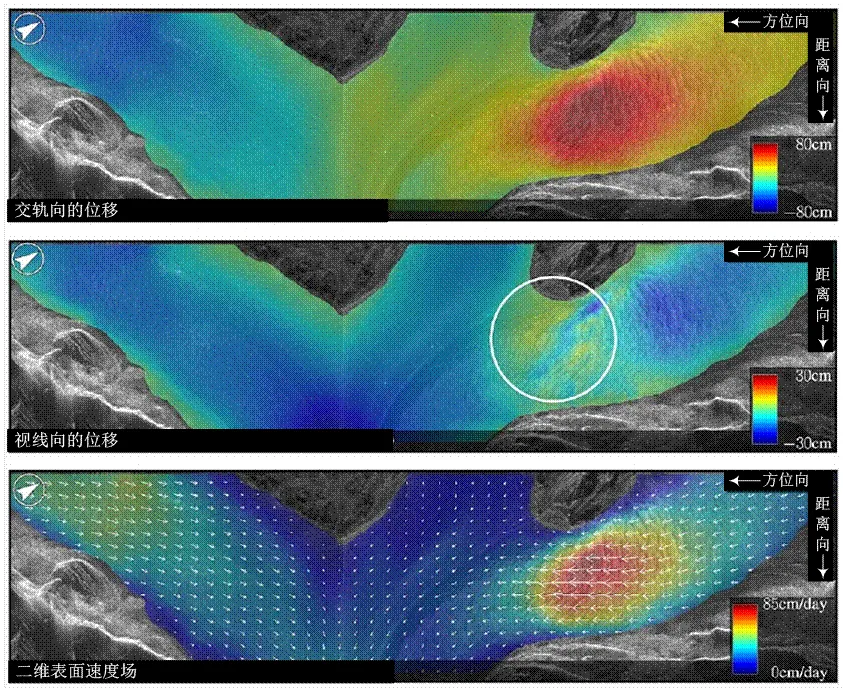
图4利用L波段机载重轨干涉SAR获取的Aletsch冰河的2维表面速度场,(上图)沿轨向位移,(中图)视线向位移,(下图)两者联合得到的2维速度场
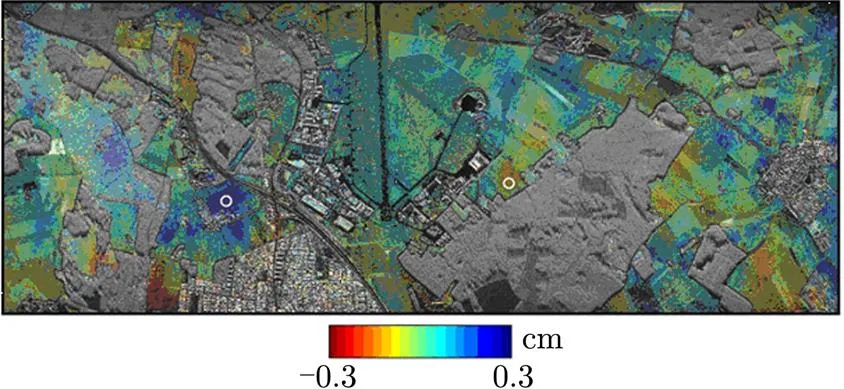
图5在SAR数据获取的两个半小时内,通过机载长时序DInSAR估计的地表平均形变,叠加了地物图像信息
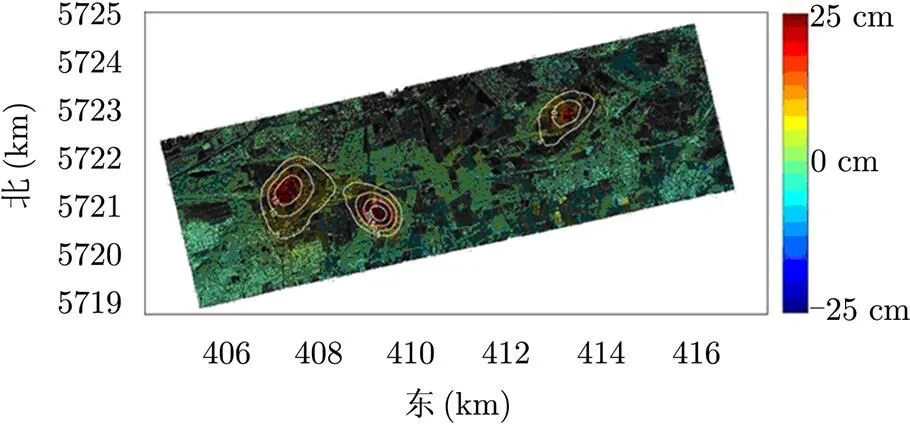
图6 机载差分干涉SAR获取的德国矿区的地表形变信息,叠加了图像信息
最近几年,美国喷气推进实验室(Jet Propul- sion Laboratory, JPL)也在机载差分干涉SAR方面做了不少工作。根据他们的观点,实现机载重轨干涉SAR的首要条件是载机平台必须能够实现精确的重复轨道飞行。因此,要求导航系统除了保证双天线干涉SAR系统正常工作外,还必须确保两次重复飞行的轨迹在预设轨迹的5 m范围内。其次,精确的方位向天线波束指向也是必须的。通常需要方位向天线指向可在范围内变化,精度保持在范围内。这样才能保证在不同的风力条件下,重复飞行时雷达照射的地面目标是一致的,见图7。JPL的机载重轨干涉SAR系统将装载在无人机上(Unpiloted Aerial Vehicle, UAV)用于地表形变的监测,但目前该UAVSAR系统暂时搭载在美国宇航局(National Aeronautics and Space Administration, NASA)的Gulfstream III飞机上作为过渡,JPL正致力于将该UAVSAR系统转移到Global Hawk UAV机上。它的重轨干涉模式工作在L波段,飞行高度在2000-18000 m之间。利用平台精确自动驾驶(Platform Precision Autopilot, PPA)设备实时提供飞机平台的差分全球定位系统(Differential Global Positioning System, DGPS)信息,在无风或微风的情况下可以将载机重复飞行的轨迹控制在参考轨迹5 m的范围内(200 km的飞行距离内)。
目前为止,JPL使用UAVSAR系统已经开展了多次重复轨道飞行的试验。2008年5月和7月在加州Lost Hills地区进行了两次飞行,飞行高度为12.5 km,采集了长达74 km的L波段SAR图像。估计并补偿残余运动误差后,得到该地区由于石油开采而造成的地表形变图,见图8。同年4月、5月和7月,利用3次重复飞行的L波段机载SAR数据,探测加州San Andreas断层附近的滑坡状况。2009年5月和6月,他们又在格陵兰和冰岛采集了一系列L波段重轨SAR数据,用于监测这些地区冰河和冰原的变化,并得到了初步的结果。
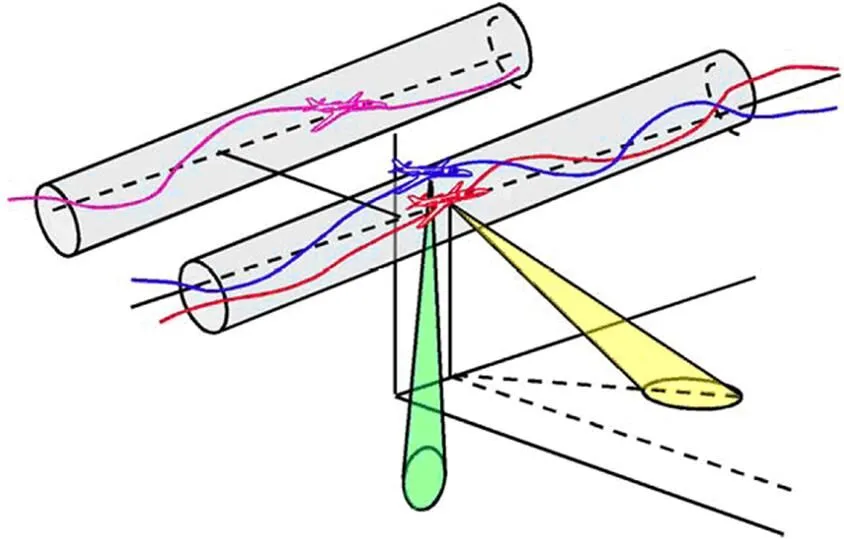
图7地表形变监测时,为了得到足够高的相干性,两次飞行的轨迹必须保持在一个很小的圆柱范围内(如图中红线和蓝线所示),而为了获得精确的地面高程信息,两次飞行的轨迹必须保持在一个特定的空间基线附近(如图中紫线所示)
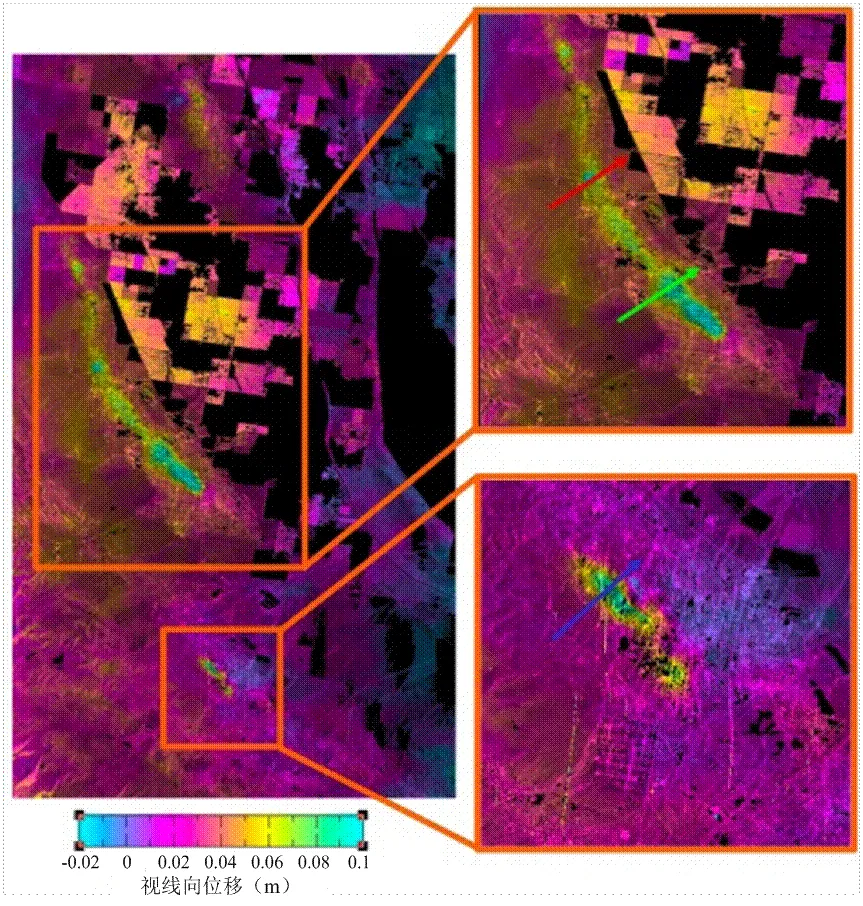
图8美国加州Lost Hills附近由于采油而造成的地表形变
意大利的科研工作者利用巴西的OrbiSAR-1机载SAR系统进行了好几次重轨干涉SAR试验。OrbiSAR-1系统拥有X和P两个工作波段,其中,X波段是双天线干涉模式。它采用GPS/INS (Inertial Navigation System, INS)导航定位系统,即使飞行120 km,航迹的误差也只有5-10 m左右。2004年8月,Perna等人在意大利中部Perugia地区利用OrbiSAR-1系统进行多次重复飞行,两天时间里获取了33幅X波段SAR图像。数据获取期间,在地面布置角反射器,并人为调整角反射器的高度。他们认为该系统获取的X波段数据中残余运动误差引起的相位误差可以忽略,只需要考虑地形和孔径造成的影响。通过常规差分干涉的方法从X波段SAR图像中提取出来的角反射器相位与实际相位的误差在/10左右,即3 mm。
2009年2月和2010年5月,巴西的研究者们同样利用OrbiSAR系统采集了多次重复轨道飞行的X和P波段SAR数据,并利用传统的2轨或3轨差分干涉的方法反演地表的3维形变信息,用于评估管道沿线的地质灾害对石油/燃气管道的威胁。P波段数据主要用于森林覆盖地区的观测,而X波段的数据用于城区的观测。实验结果表明,虽然数据获取的时间基线长达1年零3个月,但是对于P波段数据,80%的植被茂密的地区的相干性等于或大于0.3;对于X波段的数据,城区的相干性也普遍高于0.3。在去除了所有的残余运动误差之后,P波段数据地表形变监测的绝对精度达到了厘米级,而X波段数据的绝对精度达到毫米级。图9是由P波段数据反演的整个观测区域的地表形变图。从中可以看出,局部地区的地表形变较大,而城区比植被区域更加稳定。根据发生形变区域的形变量、面积以及地形坡度的大小,可以评估发生滑坡、沉降等地质灾害风险的可能性。
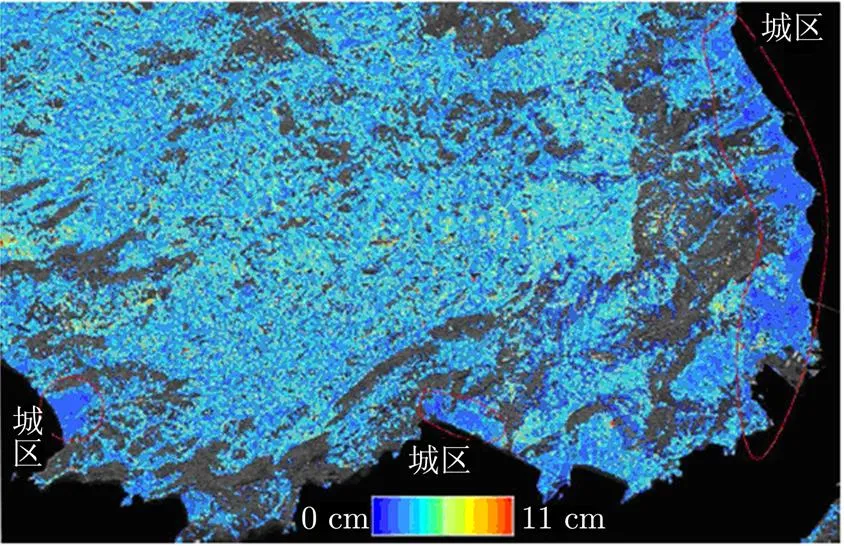
图9 从2009年2月到2010年5月间,利用P波段机载DInSAR获取的巴西São Sebastião地区的地表形变图
而早在2001年9月,荷兰的Groot就通过在大坝上布置角反射器,利用C波段机载SAR系统重复飞行监测大坝在几天时间内的形变。反演的结果与地面实测结果的差异在2 mm左右。试验结果还表明,在相干性足够高时可以通过机载重轨干涉测量大坝的形变,而在相干性很低时,可以通过布置角反射器监测长时间间隔内坝体的形变。
目前,为了进行双天线干涉和重轨干涉应用,意大利正在改进TELAER机载SAR系统。该系统搭载在LearJet 35A飞机上,之前的SAR系统只有1个X波段天线。改进后的TELAER SAR系统上增加了2个X波段天线用于接收,3个天线间的构型方式使得该系统将具备同时进行双天线交轨干涉和顺轨干涉的能力。而且,改进后的SAR系统配备了先进的嵌入式GNSS/IMU设备,使得该系统能够进行精确的重复轨道飞行,这将大大提高该系统在机载重轨干涉应用方面的能力。有关该系统的飞行试验也正在计划中。
2.2 国内发展历史及现状
这几年,我国在机载干涉SAR系统方面也有快速发展。在“十五”期间,中国科学院电子学研究所设计完成了我国第一套机载双天线干涉SAR系统。该系统工作在X波段,HH极化,载机为中国科学院的“奖状”(Cessna Citation S/Ⅱ)飞机,其主要功能是利用双天线交轨干涉模式获取DEM。中电三十八所也独立研制了一套X波段HH极化双天线干涉SAR系统,基线为1.7 m,并于2005年10月在云南试飞。2009年中国科学院电子学研究所研制了另一套X波段机载双天线干涉SAR系统服务于国家西部测图工程。该系统在硬件性能、飞行稳定性、惯导设备的精度以及数据处理算法上都实现了实用化、业务化运营的要求。2010年下半年,中国科学院电子学研究所利用研制的P波段全极化SAR系统进行了多次重复飞行试验,获取了大量数据,并利用两次重复飞行获取的数据反演了试验区的DEM,见图10。而在机载差分干涉SAR方面,国内仍处于前期的理论研究阶段,还没有开展相关的试验。而从中国科学院电子学研究所机载重轨干涉SAR试验的结果来看,对于国内的SAR系统,由于导航系统精度的限制,目前存在的主要问题是无法将实际航迹与预设航迹保持近似平行。尤其是飞行距离很长,达到上百公里时,两者常常偏离几十、几百米,甚至上千米。这会导致获取的数据的相干性较差,甚至完全去相干。而对于机载DInSAR来说,两次飞行轨迹的误差超过5 m的范围,将明显降低DInSAR的精度,甚至无法获取地表形变信息。目前,我国迫切需要提高导航系统的精度并在飞行过程中实时提供DGPS信息,以便及时调整飞行的航向和位置。总体来说,我国在机载重轨干涉SAR方面还处于起步阶段,很多问题有待解决。
(a) 干涉纹图
(a) SAR interferogram
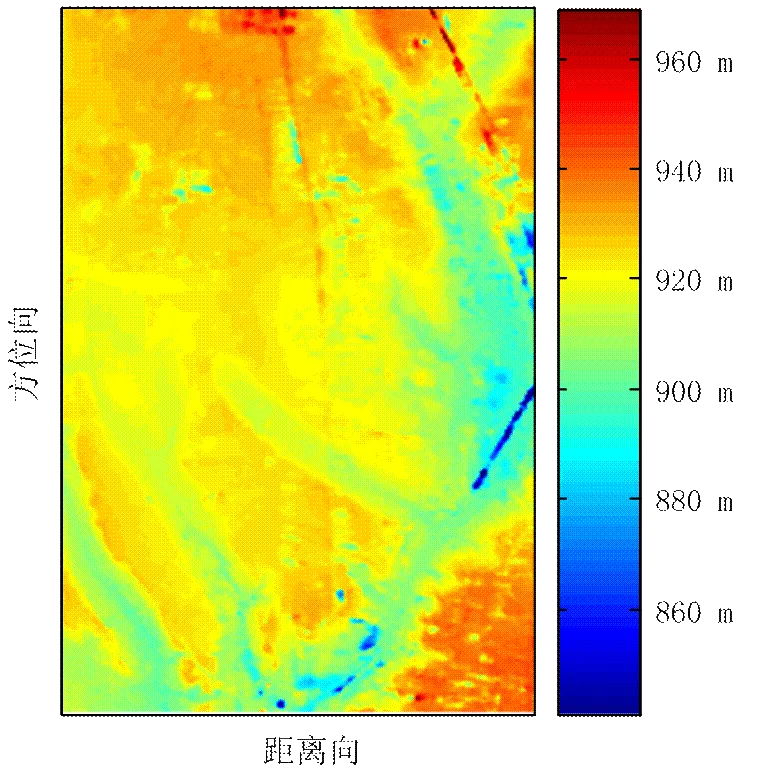
(b) 反演的DEM
3 机载重轨干涉SAR的精度
机载干涉SAR的几何关系如图11所示,其中,是载机高度,,分别为目标的高程和实际视角,,分别是主、辅图像与目标间的斜距,,分别是基线长和基线角。干涉处理时,需要测量载机的高度和斜距。对于机载重轨干涉,基线、基线角虽然不是直接测量所得,但它们仍是通过测量载机的轨迹位置,从主、辅图像的两条参考轨迹中计算得到的。而这些系统参数的测量误差将影响机载重轨干涉SAR的精度。
3.1 干涉SAR的精度
机载重轨干涉生成DEM时,高程通过以下关系式得到
(2)
(3)
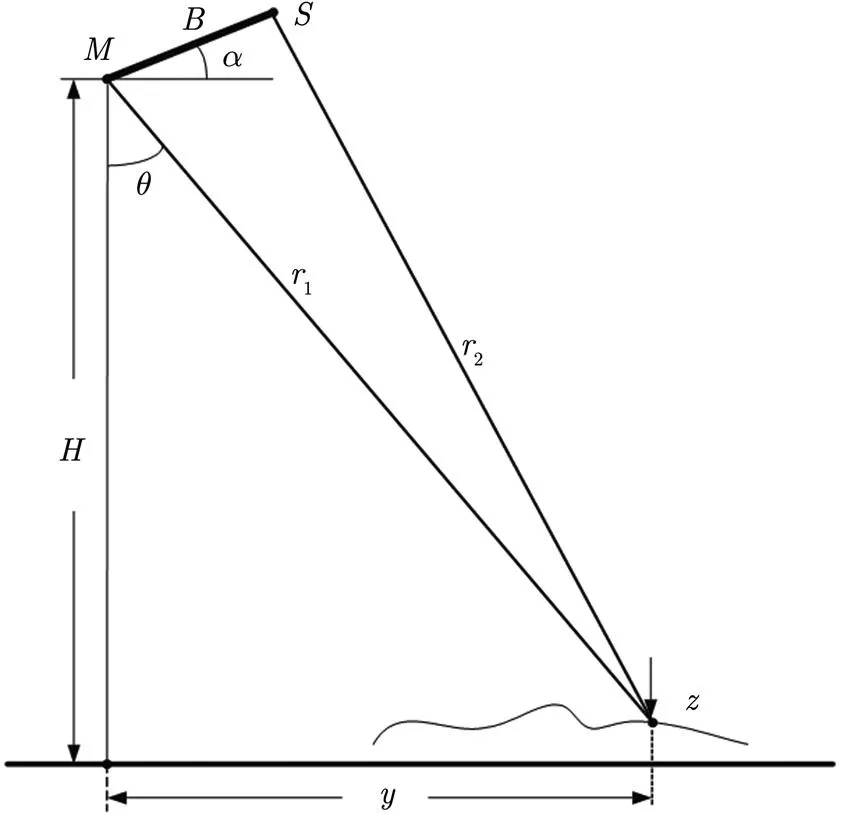
图11机载干涉SAR几何示意图
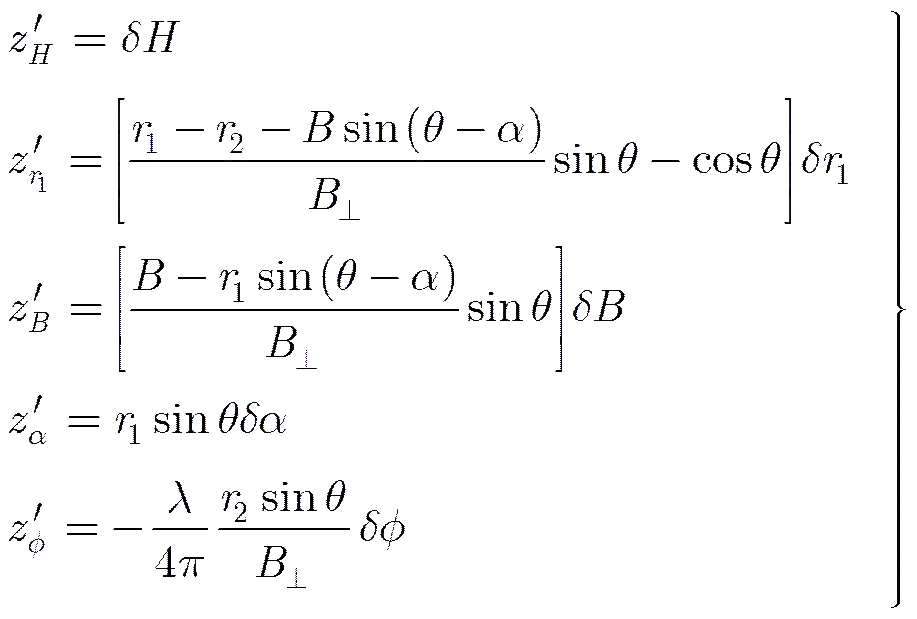
InSAR测高误差主要是由干涉相位误差和干涉相位到高程转换过程中的误差造成的。将高程对各系统参数求导,就可以求得各参数对高程精度的影响
3.2 差分干涉SAR的精度
不考虑长时序的情形,差分干涉SAR可以根据所需SAR图像的数目,分为2轨、3轨和4轨差分干涉。这里以较为简单的2轨差分干涉为例。假设外部DEM非常准确,那么,根据形变像对的几何关系由外部DEM生成的地形相位信息为

(6)
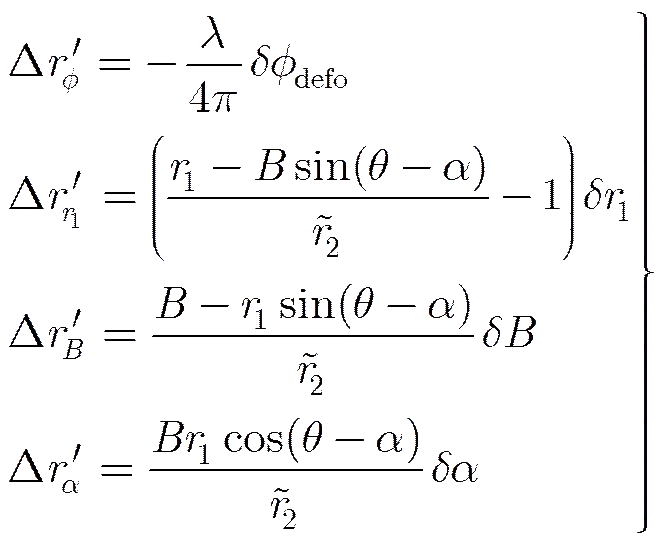
将地表形变对各个参数求导,可得
从重轨(差分)干涉的精度分析中可以看出,InSAR处理中相位误差直接决定了反演的高程和形变误差,因此,在信号处理过程中,应尽可能准确地获取干涉相位。并且,对于机载重轨干涉SAR,基线(角)的误差对高程和形变反演的影响非常大,而且,该误差是无法通过外定标去除的,因此,要获得精确的地形和形变信息,必须估计并补偿该基线(角)误差。从以上分析中看出,对于机载重轨干涉SAR,信号处理中的关键问题有二:一是保持干涉相位的准确性;二是估计并补偿基线(角)误差。下一节中,我们将详细阐述这两个问题。
4 信号处理中的关键问题和解决方法
不考虑平台的天线波束指向及飞行轨迹控制的精度的情况下,机载重轨干涉SAR相比于星载重轨干涉SAR,在SAR信号和数据处理上都存在相当大的差异。由于气流的影响,实际数据获取过程中载机将会偏离预设的航迹。通常,利用先进的导航和定位系统,准确测出飞机的实际位置和姿态,再在SAR成像时通过两级运补的方式消除由于飞机平台的偏移而引起的相位和轨迹误差。该技术已经非常成熟,并且广泛用于各种SAR成像算法中。对于SAR幅度图像,很多情况下这种补偿已经足够。但是,对于干涉SAR,尤其是机载重轨干涉SAR来说,常规的运动补偿已远远不能满足要求,成像过程中必须考虑地形、孔径以及残余运动引起的误差。
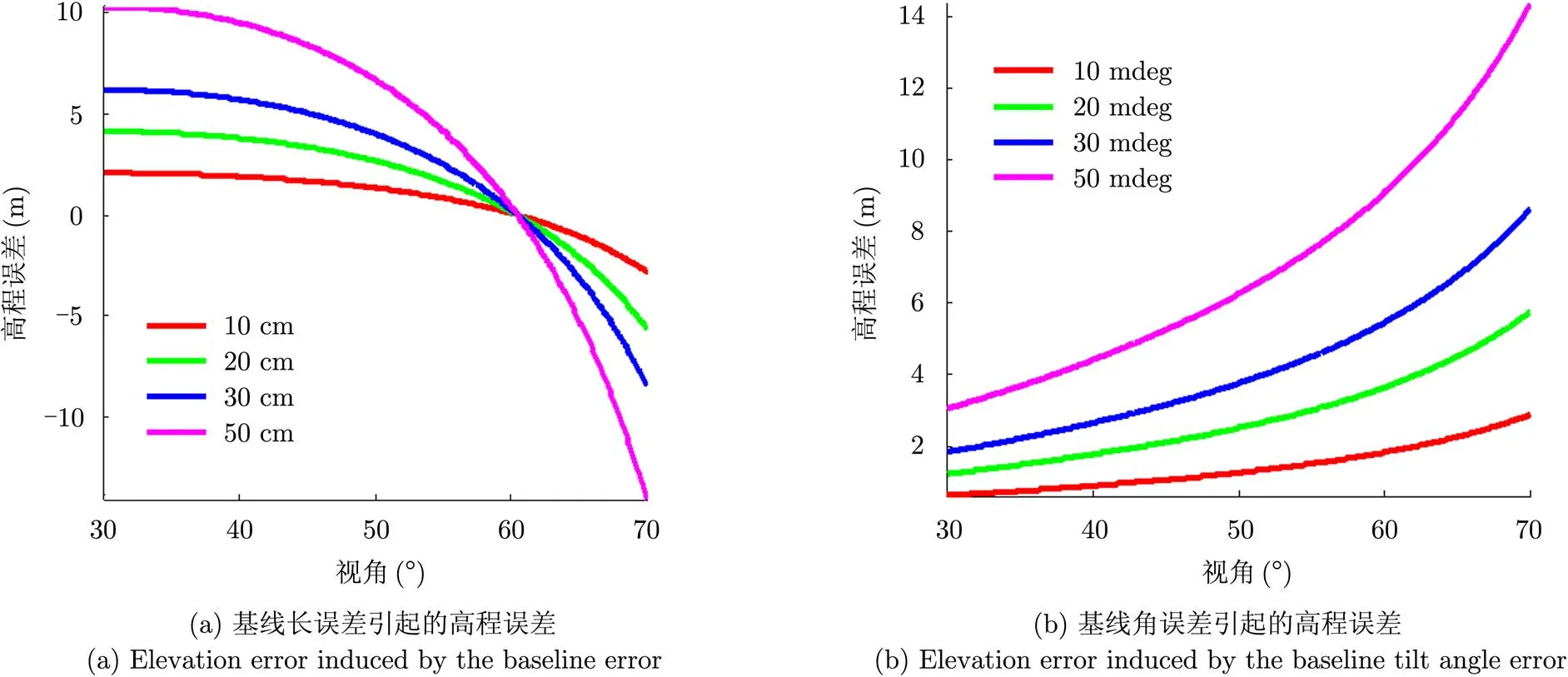
图12 基线、基线角误差造成的高程误差,其中,B=100 m, =60°, H=6000 m
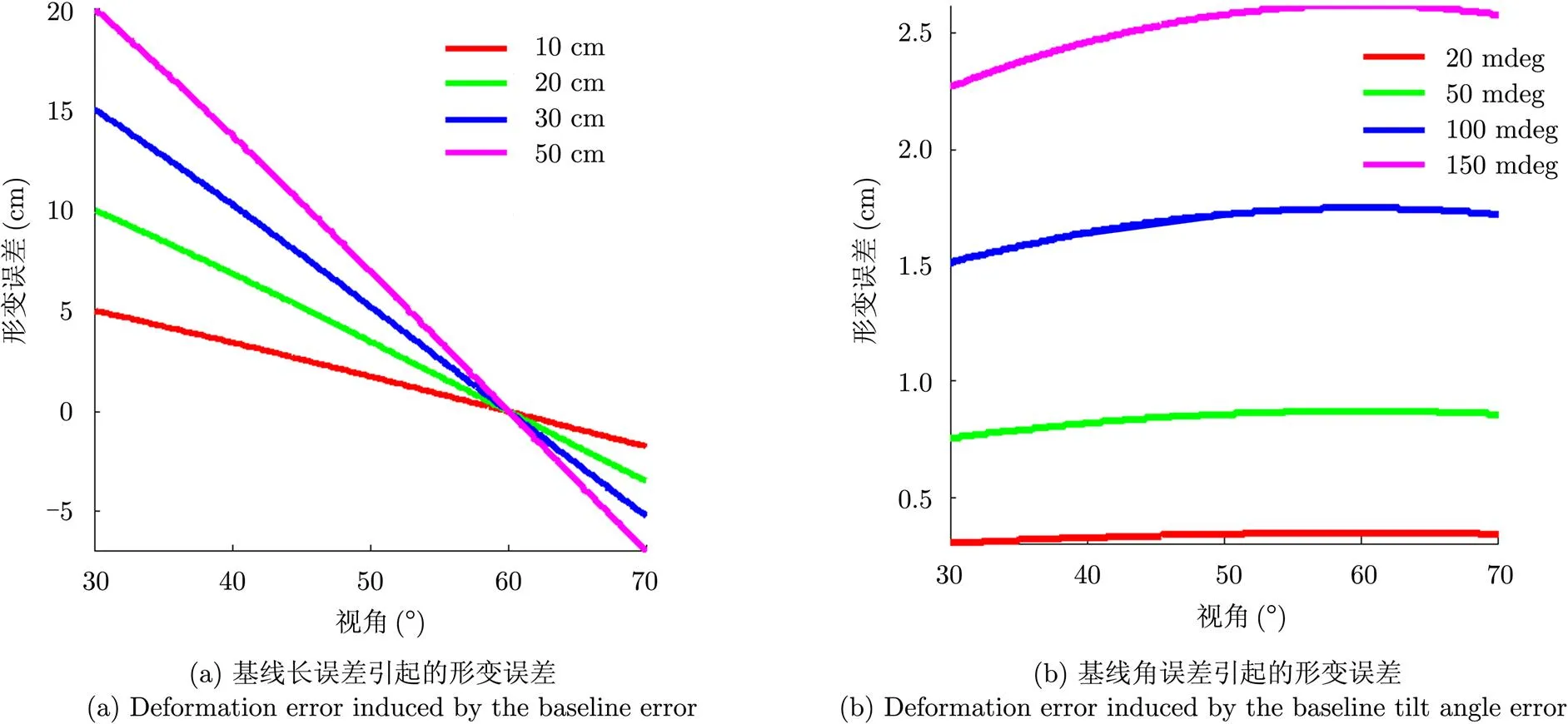
图13基线、基线角误差造成的地表形变误差,其中,B=10 m, 其它参数同图12
4.1 SAR成像过程中地形和孔径的补偿
在SAR成像过程中,除了假设飞行轨迹是匀速直线之外,还存在两个假设:一、假设天线是窄波束,在运动补偿时,同一合成孔径中的所有目标都以波束中心的目标的运动补偿量进行补偿,如图14所示;二、假设成像区域是平地,成像过程中使用某一参考高程作为该区域所有目标的高程。图14中,是目标相对于参考轨迹的最近斜距,是瞬时斜视角为时,目标相对于参考轨迹的斜距。对于点目标,在斜视角为时,目标视线向实际的运动误差为。但是,按照这里的假设一,在成像过程中实际补偿的误差为。两者的差异为
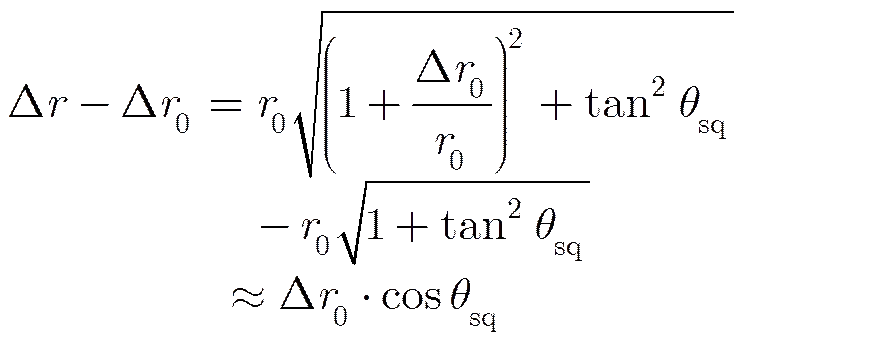
对于DLR E-SAR系统的P波段SAR来说,方位向波束角的变化范围为±12°。对于视线方向10 m的轨迹偏移,将在合成孔径中心和边缘造成的路径差达22 cm,对应的相位误差达到180°以上。这对干涉SAR来说是绝对不能接受的。目标实际的高程与参考高程的差异也会在图像中引起补偿的误差,其大小为
(9)
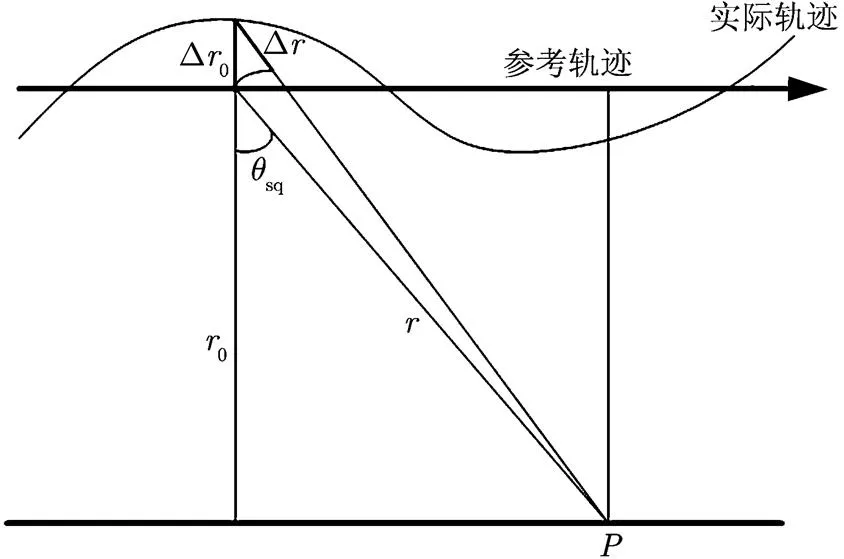
图14正侧视情况下,与孔径位置有关的运动补偿
最早考虑波束中心假设不成立的是DLR的Potsis等人和JPL的Madsen。他们在研究宽波束SAR成像时发现:对于工作在低频频段的宽波束SAR,由于它在方位向具有很大的波束角,若仍然采用波束中心处的偏移量补偿所有的孔径位置,将造成目标在方位向的压缩质量急剧下降。而常规的运动补偿方法并不能补偿随孔径位置变化的视线向误差。因此,他们提出将初级运补后的数据在方位向分成多个小块,每块64个像元。对每个小块数据作短时快速傅里叶变换(Fast Fourier Transform, FFT),再利用式(10)所示的时间与频率的关系
关于地形和孔径的补偿,DLR的Prats等人提出了SATA (Sub-ApertureTopography- and Aperture-dependent)算法。几乎与此同时,DLR的Macedo和Scheiber也提出了PTA(Precise Topography- and Aperture-dependent)方法。这两种方法本质上是一致的,都是利用式(10)所示的时频关系、利用外部DEM进行孔径和地形效应的补偿。不同之处在于:SATA方法是在方位向脉压之前、传统的次级运动补偿之后的时域进行分块,通过短时FFT变换到频域,一次补偿该小块数据中由地形和孔径引起的误差,其流程见图15;而PTA方法则是在方位压缩之后的距离多普勒域中,通过时频关系逐点补偿每个像元上由孔径和地形引起的误差相位,见图16。PTA算法能够精确补偿地形的影响,但是运算量巨大;SATA方法在补偿精度上虽不及PTA,但运算量较小。另外,PTA方法假设运动误差对式(10)所示的时频关系式没有影响,而在最近的文献中有作者提出了改进的PTA方法,它校正了运动误差对时频关系式的影响,使得补偿更为准确。
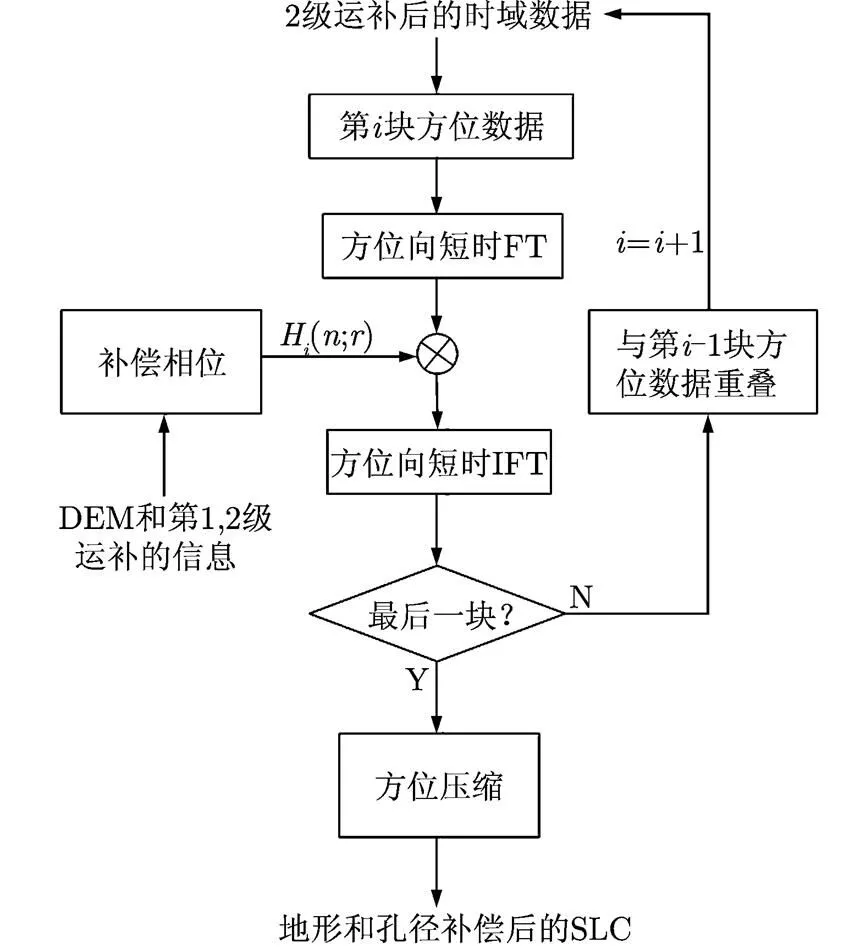
图15 SATA算法的流程图
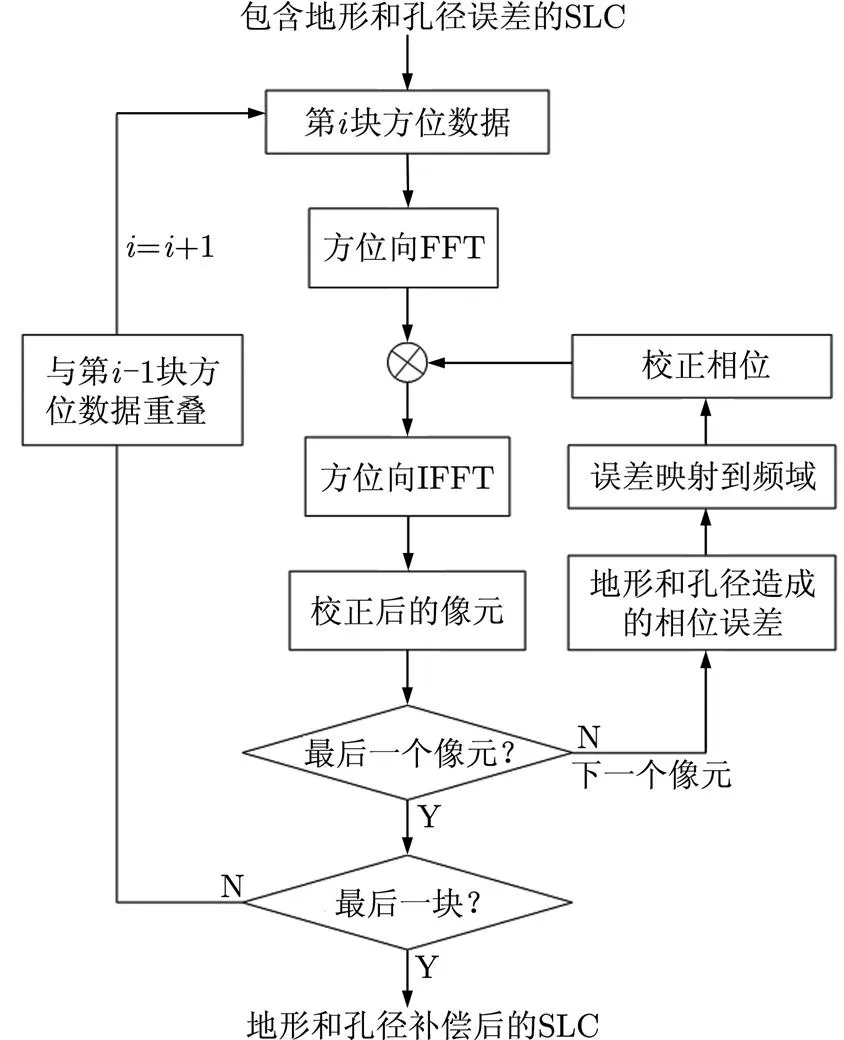
图16 PTA算法的流程图
4.2 残余运动的估计和补偿
目前,载机导航定位系统的精度,即使在进行DGPS处理后,仍然只能达到2-15 cm的精度。由导航设备精度的限制而引起的载机位置的误差,称作残余运动误差(Residual Motion Error, RME)。未补偿的误差会在生成的SAR图像中产生方位向散焦和相位误差。重轨干涉SAR每次飞行过程中的残余运动都是独立的,由此引入了未知的时变基线误差。在生成干涉纹图的时候,由于残余运动相互独立而无法相互抵消。这与双天线干涉SAR系统的情况正好相反。对于双天线SAR系统,两幅图像中的残余运动误差在生成干涉纹图时几乎可以完全抵消,并不影响最终的DEM反演。残余运动误差将会在距离向和方位向产生严重的相位误差,在机载重轨干涉SAR应用时,必须补偿该误差。这也是实现机载重轨干涉SAR的重点和难点所在。
1993年,Gray等人在进行第一次机载重轨干涉试验时,发现了干涉相位沿方位向的波动,并将其归因于运动补偿的误差。Scheiber 等人分析了机载重轨干涉中各种相位误差的起因及其校正,指出除地形因素外,常数基线、配准误差、残余运动误差都会产生相位误差。常数基线主要产生沿距离向的相位误差,可以通过引入外部DEM模拟干涉纹图估计出该常数基线,再加以消除。方位向的配准误差也会在干涉纹图中产生误差相位。斜视角越大,对配准的要求越高,尤其对于短波,如X/C波段。而残余运动误差会引起方位向的相位波动。目前,文献中提出的有关消除该残余运动误差的方法主要分为两类:第一类是通过子孔径干涉的方法估计两幅重轨SAR图像残余运动的差异,将估计的结果补偿到一幅图像中,或者两幅图像各补偿一部分;第二类是分别估计和补偿每幅SAR图像的残余运动,然后再作干涉处理。第一类方法的出发点是:对于不同的子孔径图像,它们所包含的残余运动误差是不同的。其实,早在1997年,Bullock等人就利用这个思想进行双天线数据的残余运动估计。根据所估计的量,第一类方法还可以细分为两种:通过干涉像对间的配准误差间接估计出残余运动误差;或者,通过对应像元上的相位差直接估计残余运动误差。理论上,利用相位比利用位置计算能够得到更高的精度。运动误差的补偿通常是直接在干涉纹图上乘以校正相位,再通过插值进行配准。其实,相位误差和配准误差都是由传感器定位精度的限制所致,因此,可以将相位校正和配准放在一起完成。Prats等人在图像方位压缩前补偿残余运动误差,从而无需插值就可以完成图像配准和相位校正。在图像的相干性比较差的时候,上述两种方法都得不到准确的结果。基于这一点,Reigber等人又提出了一种改进的时变基线误差估计的方法—多斜视方法(MultiSquint technique, MS)。该方法将图像分成多个子孔径,根据相干系数对子孔径干涉相位的差值进行加权求和,这样就可以将低相干区的运动误差从附近的高相干区中估计出来,MS方法的流程见图17。该方法也适用于大斜视角、大基线以及地形变化剧烈的地区,但这种情况下需要考虑主、辅图像方位向配准的偏移量在全图范围内的变化。MS方法的精度非常高,理论上可以达到1-2 mm,但计算量大。算法的精度还取决于干涉SAR系统的参数、选取的子孔径带宽及间隔。MS方法假设方位向的配准误差都来自于载机的残余运动,但当地表存在沿轨方向的形变时,该假设就不成立了。此时,如果再用MS方法计算将会过度估计残余运动的值。因此,又提出一种扩展的MS方法(Extended MultiSquint technique, EMS)来分离这两种配准误差的影响。
第一类方法只补偿了两幅SAR图像残余运动的差值,而每幅图像各自的残余运动误差仍然未知。因此,该方法并不能改善单幅SAR图像的聚焦效果。为了能够补偿单幅图像的残余运动,陆续有作者提出使用自聚焦的方法进行残余运动的估计。Cantalloube 等人利用孤立点目标在方位向进行相位跟踪来估计残余运动误差,得到方位向超高分辨率的图像。但是,该方法对孤立点目标的要求太高,而且人为参与的成份太多,不适合实际处理。Macedo等人提出利用改进的相位曲率自聚焦方法(Weighted Phase Curvature Autofocus, WPCA)分别估计每幅SAR图像的残余运动误差并补偿,再进行重轨干涉。不过,当残余运动误差在1个合成孔径内近似为线性时,该方法无法得到准确的结果。但是,该方法估计的是单幅SAR图像的残余运动误差,不受时间去相干和地表运动的影响,且可以提高目标方位向压缩的质量。钟雪莲等人也提出了一种估计单幅SAR图像中的残余运动误差的方法MTPT (Multi-squint Technique with Point Targets)方法。该方法通过沿方位向分布的一系列点目标,利用子孔径的方法测量相邻子孔径间的相位差,得到残余运动误差的2阶导数,然后通过两次积分得到最终的残余运动误差。通过仿真和实测数据,MTPT方法的有效性得到了验证。但是,对于机载重轨干涉SAR,从已有的实验结果来看,该方法虽然可以使得图像的方位向压缩得到很大的提高,但它的相位精度仍有限。不过,该方法还在进一步的完善中。
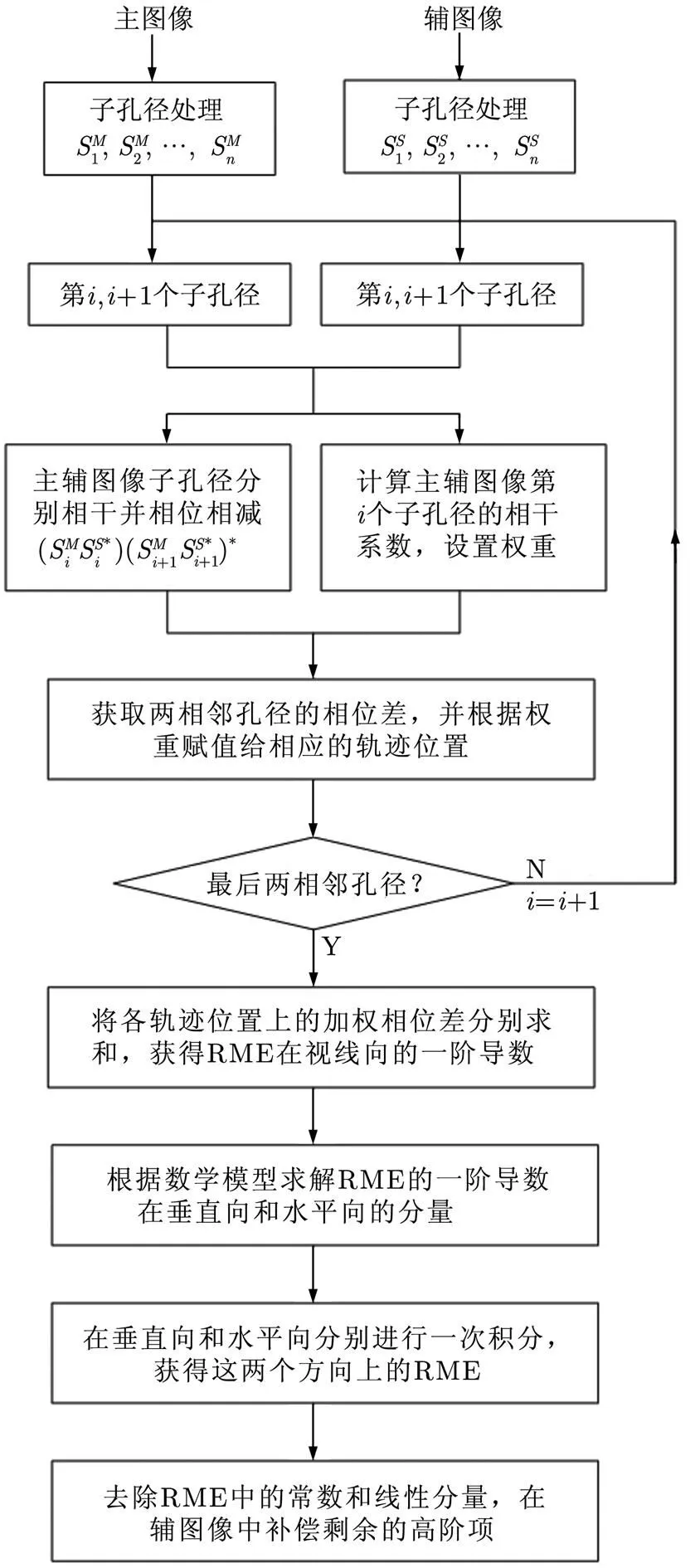
图17 MS方法的流程图
5 应用前景及发展方向
早在2002年,NASA的固体地球科学工作组就曾建议利用机载SAR系统以几十分钟或几小时的间隔飞行,这样就可以和星载差分干涉SAR结合起来,实现从分钟到十几年不同时间跨度的地表形变监测。如果这个构想可以实现,人类就可以更好地认识地球上发生的形变信息及机理,最终能够预测火山、地震、泥石流等自然灾害的发生。而且,机载重轨干涉SAR不仅可以监测自然状况下大范围的地表形变,还可以用于监测由人为因素引起的小范围地表形变,如煤炭、石油、地下水开采等造成的地面沉降。因此,可以说灾害的预警和监测是机载重轨干涉SAR最重要的用途之一。我国70%以上的城市、50%以上的人口分布在气象、地震、地质、海洋等自然灾害严重的地区。灾害的预警和监测是未来几年内我国将要重点发展的方向。从这一点来看,发展机载重轨干涉SAR技术也是符合我国当前的国情和政策需要的。
除了用于地表形变监测之外,机载重轨干涉SAR还有以下几个重要用途:
首先,对于植被茂密的地区,工作在低频段(如L和P波段)的SAR系统可以穿透植被达到地表,因此,通过设计合理的基线长度,机载重轨干涉SAR能够获得与高频(如X波段)双天线干涉SAR系统同等精度的林下地面高程信息。并且,与高频双天线干涉SAR系统相结合,低频机载重轨干涉SAR能够获得森林的高度信息,为森林生物量和燃料图的绘制提供了一种可能的途径。
其次,机载重轨干涉可用于机载层析SAR (Tomo-SAR)。通过载机在不同高度位置上的多次重复飞行,可以获取目标沿高度向的采样信息。综合利用高度向收集的这些相干回波信号,构造目标在高度向的合成孔径,能够实现真实的目标3维(3D)成像能力。它不仅可用于森林生物量和高度、土壤湿度以及冰层厚度等的反演,还可以解决InSAR中由于叠掩而造成的高程和反射率的错误解译。同时,层析SAR与DInSAR技术相结合,即所谓的4维(4D)SAR成像,不仅能够在高度向上分离目标,还可以区分这些目标上所发生的缓慢形变的速度。
再次,机载重轨干涉SAR与全极化信息相结合,可以提供森林参数的定量估计,成为森林制图和森林生态系统监测的一个潜在的强有力手段。机载重轨干涉与全极化信息还可用于冰川消融的定量估计中,同时再利用层析技术,就可以得到目标垂直向的特性信息,为冰川、冰原等提供详细的结构信息。这些应用对全球气候变化研究以及海平面变化的监测都具有非常重要的意义。
6 结束语
前文中我们详细介绍了国内外机载重轨干涉SAR的发展情况、关键技术问题以及解决方法。虽然国际上已经出现了较为成熟的机载重轨干涉SAR系统,也成功进行了几次试验,但目前机载重轨干涉SAR技术还不完全具备业务化运营的条件,还存在一些问题需要进一步研究。
首先,也是影响最大的是大气效应。大气的延迟效应主要来自对流层底部大气水汽的变化,因而,对于位于地面上几千米高度的机载平台来说,与星载SAR一样存在着大气效应的影响。由于重轨数据获取的过程中,大气总在不断变化,导致两次数据获取过程中大气延迟效应的不一致。而在进行差分干涉时,会误将大气效应当成是地表的形变。关于大气效应的消除,目前主要存在两种方法:定标和滤波。定标主要是通过地面实地气象测量、GPS测量或第三方气象数据去除大气效应。滤波是指利用大气效应在空间上相关、时间上不相关的特点,将多时相图像得到的相位差在时间上作高通滤波、空间上作低通滤波以消除大气效应。目前主要用于永久散射体(Permanent Scatterers, PS)技术中。在已经发表的有关机载重轨干涉SAR的文献中,参数反演过程时很少考虑大气效应的影响,而为了参数反演的精确性,大气效应是必须要考虑的。因此,在机载SAR数据采集的同时,需要同步获取被观测场景的气象参数,如温度、压强、相对湿度等,并进行定标处理用于大气效应的消除。如果无法获取这些气象和定标数据,需要考虑采用滤波的方法消除大气效应。
其次,土壤含水量的变化也会造成与大气类似的效应。因为电磁波穿透土壤的能力与波长及土壤的含水量直接相关,土壤含水量的变化会造成电磁波穿透土壤深度的差异,从而造成地表位移的现象。关于电磁波穿透土壤的性质很早前就开始研究了,但在差分干涉SAR中将它作为一种误差因素考虑的还很少。在土壤湿度变化较大的地区进行地表形变反演,电磁波穿透土壤的特性也是必须要考虑的。
对于我国来说,发展机载重轨干涉SAR技术除了存在以上共同的问题需要解决之外,还要解决我们的SAR系统自身的问题。最为突出的是需要提高机载SAR导航系统的精度,并开发载机自动驾驶设备,用于实时控制和调整飞行的航迹,以满足机载重轨干涉和差分干涉的基线条件。
[1] Reis J J, Williams M A, Hensley S,.. Updating GeoSAR for full-pol interferometric capability[C]. IEEE Radar Conference, Pasadena, CA, USA, 2009: 1-6.
[2] Gray A and Farris-Manning P. Repeat-pass interferometry with airborne synthetic aperture radar[J]., 1993, 31(1): 180-190.
[3] Hensley S, Klein J, Rosen P,.. Repeat pass aircraft interferometry results at Portage Lake, Maine and Innisfail, Australia[C]. The Airborne Science Workshop, NASA, Pasadena, California, USA, 1995.
[4] Reigber A and Ulricht A. P-band repeat-pass interferometry with the DLR Experimental SAR (E-ESAR): first results[C]. International Geoscience and Remote Sensing Symposium, Seattle, WA, USA, 1998: 1914-1916.
[5] Ulbricht A and Reigber A. L-band repeat-pass DEM- generation with DLR’s Experimental SAR(E-SAR)[C]. International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 1999: 2164-2166.
[6] Cantalloube H and Nahum C E. Repeat-pass airborne SAR interferometry[C]. The 3rd European Conference on Synthetic Aperture Radar, Munich, Germany, May 2000.
[7] Shimada M, Furuta R, Watanabe M,.. Repeat pass SAR interferometry of the Pi-SAR (L) for DEM generation[C]. International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 2004: 473-476.
[8] Reigber A, Mercer B, Prats P,.. Spectral diversity methods applied to DEM generation from repeat-pass P-band InSAR[C]. The 6th European Conference on Synthetic Aperture Radar, Dresden, Germany, May 2006.
[9] Horn R. The DLR airborne SAR project E-SAR[C]. International Geoscience and Remote Sensing Symposium, Lincoln, NE, May 1996: 1624-1628.
[10] Scheiber R, Reigber A, Ulbricht A,.. Overview of interferometric data acquisition and processing modes of the experimental airborne SAR system of DLR[C]. International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 1999: 35-37.
[11] Reigber A, Jäger M, Fischer J,.. Performance of the L- and P-band subsystems of the F-SAR airborne SAR instrument[C]. The 9th European Conference on Synthetic Aperture Radar, Nuremberg, Germany, Apr. 2012.
[12] Macedo K A C de and Scheiber R. Controlled experiment for analysis of airborne D-InSAR feasibility[C]. The 5th European Conference on Synthetic Aperture Radar, Ulm, Germany, May 2004.
[13] Macedo K A C de, Andres C, and Scheiber R. On the requirements of SAR processing for airborne differential interferometry[C]. International Geoscience and Remote Sensing Symposium, Seoul, Korea, July 2005: 2693-2696.
[14] Prats P, Scheiber R, Reigber A,.. Estimation of the surface velocity field of the Aletsch glacier using multibaseline airborne SAR interferometry[J]., 2009, 47(2): 419-430.
[15] Macedo K A C de, Scheiber R, and Moreira A. First evaluation of airborne InSAR time-series[C]. The 6th European Conference on Synthetic Aperture Radar, Dresden, Germany, May 2006.
[16] Prats P, Reigber A, Blanco P,..Advanced differential SAR interferometric techniques applied to airborne data[C]. The 6th European Conference on Synthetic Aperture Radar, Dresden, Germany, May 2006.
[17] Prats P, Scheiber R, Reigber A,..Advanced D-InSAR techniques applied to a time series of airborne SAR data[C]. International Geoscience and Remote Sensing Symposium, Barcelona, Spain, July 2007: 4874-4877.
[18] Prats P, Reigber A, Mallorqui J J,.. Estimation of the temporal evolution of the deformation using airborne differential SAR interferometry[J]., 2008, 46(4): 1065-1078.
[19] Berardino P, Fornaro G, Lanari R,.. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms[J]., 2002, 40(11): 2375-2383.
[20] Reigber A, Scheiber R, Jäger M,.. Very-high-resolution airborne synthetic aperture radar imaging: signal processing and applications[J]., 2013, 101(3): 759-783.
[21] Bara M, Monne J, and Broquetas A. Navigation systems requirement for airborne interferometric SAR platforms[C]. International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 1999: 2158-2160.
[22] Rosen P, Hensley S, Wheeler K,.. UAVSAR: a new NASA airborne SAR system for science and technology research[C]. IEEE Conference on Radar, Verona, New York, USA, Apr. 2006.
[23] Madsen S, Hensley S, Wheeler K,.. UAV-based L-band SAR with precision flight path control[C]. In Proceedings SPIE, 2005, 5659: 51-60.
[24] Lee J, Strovers B, and Lin V. C-20A/GIII precision autopilot development in support of NASA’s UAVSAR program[C]. NASA Science Technology Conference, Greenbelt, Maryland, USA, June 2007.
[25] Hensley S, Michel T, Simard M,.. Residual motion estimation for UAVSAR: implications of an electronically scanned array[C]. IEEE Radar Conference, Pasadena, California, USA, May 2009.
[26] Hensley S, Zebker H, Jones C,.. First deformation results using the NASA/JPL UAVSAR instrument[C]. The 2nd Annual Asia Pacific SAR Conference, Xi’an, China, Oct. 2009.
[27] Hensley S, Zebker H, Jones C,.. Use of airborne SAR interferometry for monitoring deformation of large-scale man-made features[C]. International Workshop Spatial Information Technologies for Monitoring the Deformation of Large-Scale Man-made Linear Features, Hong Kong, China, Jan. 2010.
[28] Hensley S, Jones C, Moller D,.. Ice studies using UAVSAR L-band and Ka-band data[C]. The 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, June 2010.
[29] Fornaro G, Lanari R, Sansosti E,.. Airborne differential interferometry: X-band experiments[C]. International Geoscience and Remote Sensing Symposium, Anchorage, USA, 2004: 3329-3332.
[30] Perna S, Wimmer C, Moreira J,.. X-band airborne differential interferometry results of the OrbiSAR campaign over the Perugia area[J]., 2008, 46(2): 489-503.
[31] Perna S, Wimmer C, Moreira J,.. X-band airborne DInSAR with OrbiSAR system: new results[C]. The 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, June 2008.
[32] Macedo K A C de, Wimmer C, Barreto T,.. Long-term airborne DInSAR measurements at X- and P-bands: a case study on the application of surveying geohazard threats to pipelines[J]., 2012, 5(3): 990-1005.
[33] Groot J. River dike deformation measurement with airborne SAR[J]., 2004, 1(2): 94-97.
[34] Perna S, Berardino P, Britti F,.. Capabilities of the TELAER airborne SAR system upgraded to the multi-antenna mode[C]. International Geoscience and Remote Sensing Symposium, Munich, Germany, July 2012: 1545-1548.
[35] Xiang M, Wu Y, Li S,.. Introduction on an experimental airborne InSAR system[C]. International Geoscience and Remote Sensing Symposium, Seoul, South Korea, July 2005: 4809-4812.
[36] Sun L, Zhang C, Hu M,.. Performance analysis and data processing of the airborne X-band InSAR system[C]. The 1st Asian and Pacific Conference on Synthetic Aperture Radar, Nov. 2007.
[37] 韩松涛. 机载双天线干涉SAR数据处理关键技术研究[D]. [博士论文], 中国科学院电子学研究所, 2010.
Han Song-tao. Study on key technology of data processing for airborne dual-antenna InSAR system[D]. [Ph.D. dissertation], Institute of Electronics, Chinese Academy of Sciences, 2010.
[38] 钟雪莲. 机载重轨干涉SAR残余运动估计方法研究[D]. [博士论文], 中国科学院电子学研究所, 2011.
Zhong Xue-lian. Residual motion estimation for airborne repeat-pass interferometric SAR[D]. [Ph.D. dissertation], Institute of Electronics, Chinese Academy of Sciences, 2011.
[39] 钟雪莲, 向茂生, 岳焕印, 等. 机载差分干涉SAR 的误差分析[J]. 电子与信息学报, 2010, 32(4): 941-947.
Zhong Xue-lian, Xiang Mao-sheng, Yue Huan-yin,.. Error analysis for airborne differential SAR interferometry[J].&, 2010, 32(4): 941-947.
[40] Moreira A and Huang Y. Airborne SAR processing of highly squinted data using a chip scaling approach with integrated motion compensation[J]., 1994, 32(5): 1029-1040.
[41] Reigber A, Potsis A, Alivizatos E,.. Wavenumber domain SAR focusing with integrated motion compensation[C]. International Geoscience and Remote Sensing Symposium, Toulouse, France, July 2003: 1465-1467.
[42] Scheiber R. A three-step phase correction approach for airborne repeat-pass interferometric SAR data[C]. International Geoscience and Remote Sensing Symposium, Toulouse, France, 2003: 1190-1192.
[43] Potsis A, Reigber A, and Mittermayer J. Sub-aperture algorithm for motion compensation improvement in wide beam SAR data processing[J]., 2001, 37(23): 1405-1407.
[44] Madsen S. Motion compensation for ultra wide band SAR[C]. International Geoscience and Remote Sensing Symposium, Sydney, Australia, July 2001: 1436-1438.
[45] Scheiber R and Bothale V. Interferometric multi-look techniques for SAR data[C]. International Geoscience and Remote Sensing Symposium, Tornato, ON, Canada, June 2002: 173-175.
[46] Zheng X, Yu W, and Li Z. A novel algorithm for wide beam SAR motion compensation based on frequency division[C]. International Geoscience and Remote Sensing Symposium, Denver, CO, USA, 2006: 3160-3163.
[47] Fornaro G, Franceschetti G, and Perna S. On center-beam approximation in SAR motion compensation[J]., 2006, 3(2): 276-280.
[48] Prats P, Reigber A, and Mallorqui J. Topography-dependent motion compensation for repeat-pass interferometric SAR systems[J]., 2005, 2(2): 206-210.
[49] Macedo K A C de and Scheiber R. Precise topography- and aperture- dependent motion compensation for airborne SAR[J]., 2005, 2(2): 172-176.
[50] Prats P, Macedo K A C de, Reigber A,.. Comparison of topography- and aperture- dependent motion compensation algorithms for airborne SAR[J]., 2007, 4(3): 349-353.
[51] Zamparelli V, Perna S, and Fornaro G. An improved topography and aperture dependent motion compensation algorithm[C]. International Geoscience and Remote Sensing Symposium, Munich, Germany, July 2012: 5805-5808.
[52] Scheiber R and Robert P. Origin and correction of phase errors in airborne repeat-pass SAR interferometry[C]. International Geoscience and Remote Sensing Symposium, Sydney, Australia, July 2001: 3114-3116.
[53] Bullock R J, Voles R, Currie A,.. Two-look method for roll correction of aircraft-borne interferometric SAR data[C]. IEE Colloquium on Radar Interferometry, Apr. 1997: 2/1-2/6.
[54] Bullock R J, Brennan P V, and Griffiths H D. Two look roll compensation for aircraft-borne interferometric SAR without phase unwrapping[J]., 2005, 41(6): 367-368.
[55] Riel B and Muellerschoen R. Results of UAVSAR airborne SAR repeat-pass multi-aperture interferometry[OL]. http:// www.asf.alaska.edu/sites/all/files/documents/2011-ceos-workshop/Results%20of%20UAVSAR%20Airborne%20SAR%20RPMA%20InSAR,%20R.Muellerschoen.pdf, 2011.
[56] Scheiber R and Moreira A. Coregistration of interferometric SAR images using spectral diversity[J]., 2000, 38(5): 2179-2191.
[57] Reigber A and Papathanassiou K. Correction of residual motion errors in airborne repeat-pass interferometry[C]. International Geoscience and Remote Sensing Symposium, Sydney, Australia, July 2001: 3077-3079.
[58] Prats P and Mallorqui J. Estimation of azimuth phase undulations with multisquint processing in airborne interferometric SAR images[J]., 2003, 41(6): 1530-1533.
[59] Bamler R and Eineder M. Accuracy of differential shift estimation by correlation and split-bandwidth interferometry for wideband and delta-k SAR systems[J]., 2005, 2(2): 151-155.
[60] Prats P, Reigber A, and Mallorqui J JInterpolation-free coregistration and phase-correction of airborne SAR interferograms[J]., 2004, 1(3): 188-191.
[61] Reigber A, Prats P, and Mallorqui J. Refined estimation of time-varying baseline errors in airborne SAR interferometry[J]., 2006, 3(1): 145-149.
[62] Andres C and Scheiber R. Inversion of residual motion errors in airborne single and repeat pass interferometry in the presence of squint and large topography variations[C]. The 6th European Conference on Synthetic Aperture Radar, Dresden, Germany, May 2006.
[63] Cantalloube H and Dubois-Fernandez P. Airborne X-band SAR imaging with 10 cm resolution: technical challenge and preliminary results[J].,, 2006, 153(2): 163-176.
[64] Macedo K A C de, Scheiber R, and Moreira A. An autofocus approach for residual motion errors with application to airborne repeat-pass SAR interferometry[J]., 2008, 46(10): 3151-3162.
[65] Zhong Xue-lian, Xiang Mao-sheng, Yue Huan-yin,.. Algorithm on the estimation of residual motion errors in airborne SAR images[J]., 2013, in Print.
[66] Zhong Xue-lian, Guo Hua-dong, Xiang Mao-sheng,.. Residual motion estimation with point targets and its application to airborne repeat-pass SAR interferometry[J]., 2012, 33(3): 762-780.
[67] Solid earth science working group report[OL]. http:// solidearth.jpl.nasa.gov./PAGES/report.html, 2002.
[68] InSAR workshop summary report[OL]. http://solidearth. jpl.nasa.gov/insar/, Oxnard, California, Oct. 20-22, 2004.
[69] Reigber A and Moreira A. First demonstration of airborne SAR tomography using multibaseline L-band data[J]., 2000, 38(5): 2142-2152.
[70] Sauer S, Ferro-Famil L, Pottier E,.. 3D visualisation and physical feature extraction of urban areas using multibaseline POL-InSAR data at L-band[C]. 2007 Urban Remote Sensing Joint Event, Apr. 2007: 1-5.
[71] Dinh H T M, Toan T, Rocca F,.. Relating P-band synthetic aperture radar tomography to tropical forest biomass[J]., 2013, in Print.
[72] Lombardini F. Differential tomography: a new framework for SAR interferometry[J]., 2005, 43(1): 37-44.
[73] Fornaro G, Reale F, and Serafino F. Four-dimentional SAR imaging for height estimation and monitoring of single and double scatterers[J]., 2009, 47(1): 224-237.
[74] Hajnsek I, Kugler F, Lee S K,.. Tropical-Forest- parameter estimation by means of Pol-InSAR: the INDREX-II campaign[J]., 2009, 47(2): 481-493.
[75] Sharma J, Hajnsek I, Papathanassiou K,.. Estimation of glacier ice extinction using long-wavelength airborne Pol-InSAR[J]., 2012, in Print.
[76] Sharma J, Hajnsek I, and Papathanassiou K. Vertical profile reconstruction with Pol-InSAR data of a subpolar glacier[C]. International Geoscience and Remote Sensing Symposium, Barcelona, Spain, July 2007: 1147-1150.
[77] Tarayre H and Massonnet D. Effects of a refractive atmosphere on interferometric processing[C]. International Geoscience and Remote Sensing Symposium, Pasadena, California, USA, 1994: 717-719.
[78] Goldstein R. Atmosphere limitations to repeat-track radar interferometry[J]., 1995, 22(18): 2517-2520.
[79] Zebker H A, Rosen P A, and Hensley S. Atmospheric effects in interferometric synthetic aperture radar surface deformation and topographic maps[J]., 1997, 102(B4): 7547-7563.
[80] Delacourt C, Briole P, and Achache J. Tropospheric corrections of SAR interferograms with strong topography. Application to Etna[J]., 1998, 25(15): 2849-2852.
[81] Bonforte A, Ferretti A, Prati C,.. Calibration of atmospheric on SAR interferograms by GPS and local atmos-
phere models: first results[J]., 2001, 63(12): 1343-1357.
[82] Ferretti A, Prati C, and Rocca F. Permanent scatters in SAR interferometry[J]., 2001, 39(1): 8-20.
[83] Nolan M and Fatland D R. Penetration depth as a DInSAR observable and proxy for soil moisture[J]., 2003, 41(3): 532-537.
Current Development in Airborne Repeat-pass Interferometric Synthetic Aperture Radar
Zhong Xue-lianXiang Mao-shengGuo Hua-dongChen Ren-yuan
(China Electronics Technology Group Corporation No.38 Research Institute, Hefei 230088, China)(Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China)(Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, Beijing 100094, China)
Because of its agility, flexibility, and accuracy, airborne repeat-pass Interferometric Synthetic Aperture Radar (InSAR) is capable of overcoming the disadvantages of a long revisit time and a low resolution in space-borne SAR interferometry and plays an irreplaceable role in monitoring the deformation of landslides, volcanoes, earthquakes, and so on. In this paper, the history and the worldwide status of the technology of airborne repeat-pass SAR interferometry are reviewed in detail. Then, an analysis of the accuracy of this technology is presented, its key problems in practice are stated, and the related researches in this field are introduced comprehensively. The development trends and the prospects of this technology are also described in this paper. Finally, it is pointed that several issues still need to be studied further for accurate parameter inversion.
Airborne; Repeat-pass; Interferometric Synthetic Aperture Radar (InSAR); Differential Inter- ferometric Synthetic Aperture Radar (DInSAR)
TN957.2
A
2095-283X(2013)03-0367-15
10.3724/SP.J.1300.2013.13005
2013-01-11收到,2013-04-26改回;2013-05-10网络优先出版
国家高技术研究发展计划“863”项目(2011AA120404)资助课题
钟雪莲 sherryzxl@163.com
钟雪莲(1980-),女,安徽青阳人,2005年获中国科学院遥感应用研究所硕士学位,2011年获中国科学院电子学研究所博士学位,现为中国电子科技集团第三十八研究所工程师,研究方向为SAR信号处理和机载重轨干涉SAR。
E-mail: sherryzxl@163.com
向茂生(1964-),男,中国科学院电子学研究所研究员,博士生导师,研究方向为干涉合成孔径雷达系统技术和方法研究。
E-mail: xms@mail.ie.ac.cn
郭华东(1950-),男,中国科学院遥感与数字地球研究所研究员,博士生导师,中国科学院院士,研究方向为微波遥感。
E-mail: hdguo@ceode.ac.cn
陈仁元(1970-),男,安徽霍邱人,中国电子科技集团第三十八研究所高级工程师,研究方向为SAR信号处理。
E-mail: chenrenyuan3@sina.com
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
上海理工大学学报(2021年3期)2021-07-20
科学(2020年5期)2020-11-26
舰船电子对抗(2019年6期)2019-04-27
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
电子制作(2017年8期)2017-06-05
舰船电子对抗(2016年5期)2016-12-13
人生十六七(2016年14期)2016-12-01
电子制作(2016年21期)2016-05-17