基于不同限速条件下的超车模型研究
2013-07-31 21:35李存军
交通运输系统工程与信息 2013年2期
柏 伟,李存军*,2
(1.成都原达工程设计研究所,成都610097;2.四川大学建筑与环境学院,成都610065)
基于不同限速条件下的超车模型研究
柏 伟1,李存军*1,2
(1.成都原达工程设计研究所,成都610097;2.四川大学建筑与环境学院,成都610065)
超车是车辆行驶过程中普遍存在的现象.超车时机选择不当或操作失误是交通事故频发的重要原因之一,在城市干道及高速公路上,不同车道的限速要求对超车行为提出了更高的要求.本文在以往研究的基础上,将整个超车过程分为换道、超越、并道三个阶段,添加不同车道的限速条件,以安全为前提,在一个超车时段内尽可能多地超越前方行驶车辆为目标,并充分考虑车辆跟驰行驶过程中的安全间距及超越行驶过程中超越车与被超越车行程之间的关系,建立一种新的超车模型,以供车辆在超车时提供判断及辅助,并通过一个算例来验证模型的实用性.
智能交通;超车模型;限速;安全跟驰间距;超越速度
1 引 言
汽车的诞生和相关技术的发展给人们的生活带来了巨大便利.但在享受其带给我们生活便利的同时,也给社会、个人带来了不少的损失,甚至危害人身安全.仅2011年全国共发生涉及人员伤亡的道路交通事故达210 812起.随着社会生活脚步的加快,汽车行驶速 度的提高,恶性交通事故的发生呈不断上升趋势,而不当超车是交通事故频发的重要原因之一.同时,在城市主干道及高速公路处,各车道的不同限速值也对行驶车辆提出了更高的要求.提高汽车安全性能、减少道路交通事故现已成为社会普遍关注和交通科学研究所面临的重要课题之一[1].
本文在借鉴以往研究的基础上,充分考虑车辆行驶和超越时的安全跟驰距离,将整个超车过程分为换道、超越、并道三个阶段(如图1所示),并添加不同车道的限速条件,以超越车在一个超越时段内尽可能多的超越前方车辆为目标,结合车辆跟驰行驶过程中的安全距离及超车过程中超越车与被超越车行程之间的关系,建立一种新的超车模型,以供车辆超车时提供判断及辅助,降低因不当超车所造成的交通事故发生频率.

图1 超车过程三阶段示意图Fig.1 Three phase of overtaking process
2 控制流程
2.1 控制方案
在整个超车过程的换道、超越、并道三阶段中,将限制超越车进行超越行驶时的条件分为内部与外部两种.内部条件主要指:车辆外形尺寸,最高时速,最大加、减速度等;外部条件主要指:道路地形条件,各车道限速,车辆安全跟驰距离等[2].车辆进行超越行驶时必须同时满足内部条件与外部条件,否则,其超越行驶将存在极大的安全隐患.
本文是在以下假设条件下进行研究的.
(1)超越行驶发生路段平直,超越车状况良好,其条件满足超越需求.
(2)考虑到车辆进行超越时,需提前打开换道灯.因此,设定超越车从打开换道灯进行超越过程开始,至其完成换道及并道过程,在原车道及超车道临近超越车前后方无车辆进行超越行驶,且其后方跟驰的车辆都能与其保持足够的安全跟驰距离.
(3)超越路段其它车辆均正常行驶,超越车辆在完成超越行驶后,返回原车道正常跟驰.
超越车辆在进行超越驾驶时,在相应的三个超车阶段内必须满足其要求条件,控制流程如图2所示.2.2 车辆安全跟驰距离
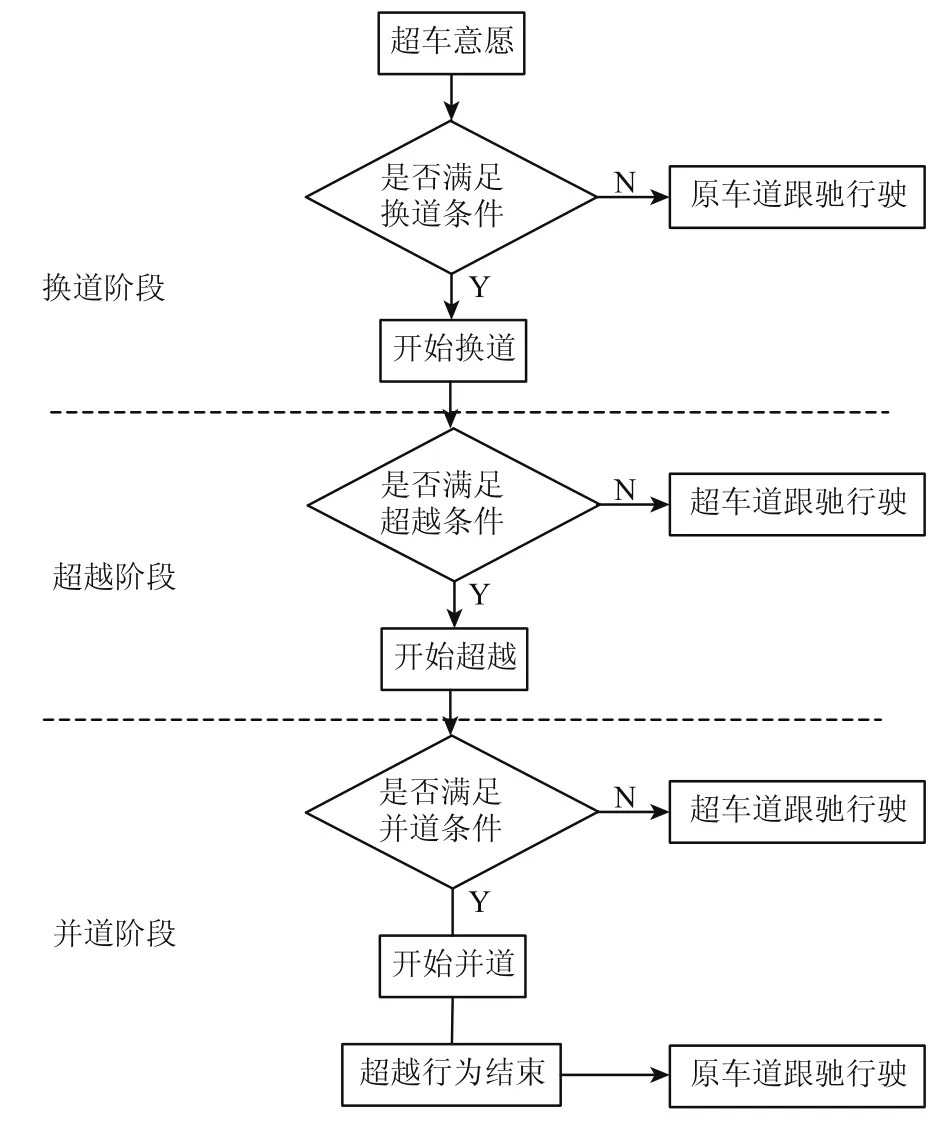
图2 超越行驶控制方案流程图Fig.2 Control plan of overtaking process
2.2.1 同车道
即两辆同向行驶的汽车在同一车道上前后跟驰,以跟驰车与前向车速度的大小关系将其分为三种情况[3-5].
(1)跟驰车车速大于前向车车速.
设相距L的Y0、Y1两汽车在同一车道上沿同一方向分别以V0Y0、V0Y1速度行驶,前向车Y1和跟驰车Y0走过的距离分别为LY1、LY0,两车的最大制动减速分别为adY1、adY0,td为减速度的增长时间,Ls为车辆停止后与前方车辆之间的安全距离.
若跟驰车车速大于前向车车速,因前向车是在有准备的情况下做匀减速运动,因此前向车无需经过反应时间tr,其制动距离为

跟驰车在前向车实施制动减速之后,经过反应时间及制动器初始时间tr,才开始减速,则跟驰车总的行驶路程为
所以,在此情况下,跟驰车与前向车的安全跟驰距离为

(2)跟驰车车速等于前向车车速.
当跟驰车车速等于前向车车速时,即 V0Y0= V0,则参照上述过程,在此条件下,跟驰车与前向
Y1车的安全跟驰距离应为

(3)跟驰车车速小于前向车.
当跟驰车车速小于前向车车速时,这种情况跟驰属于相对安全情况.但当前向车减速至与跟驰车车速相等时,跟驰车必须采取减速操作,才能够保证安全跟驰.前向车减速到与跟驰车车速相等所需的时间为(假设前向车车速等于跟驰车在前向车减速度达到最大后)

在这段时间内跟驰车以原速行驶,所行驶的距离为
当跟驰车的车速与前向车车速相等时,跟驰车必须要采取减速操作,这一过程所行驶的距离为

则跟驰车总的行驶距离为:LY0=S1+S2.对于前向车属于有准备的做匀减速运动,制动距离同前.所以,两车的安全跟驰距离为

则车辆安全跟驰距离L为

2.2.2 不同车道
不同车道车辆跟驰安全距离是指当超越车进行换道行驶时,在原车道与超车道与其前方车辆之间的不发生角碰、侧刮的最小安全跟驰距离[1].
车辆在进行超车行为时,超越车与其前方行驶的车辆之间的安全跟驰距离如图4所示.
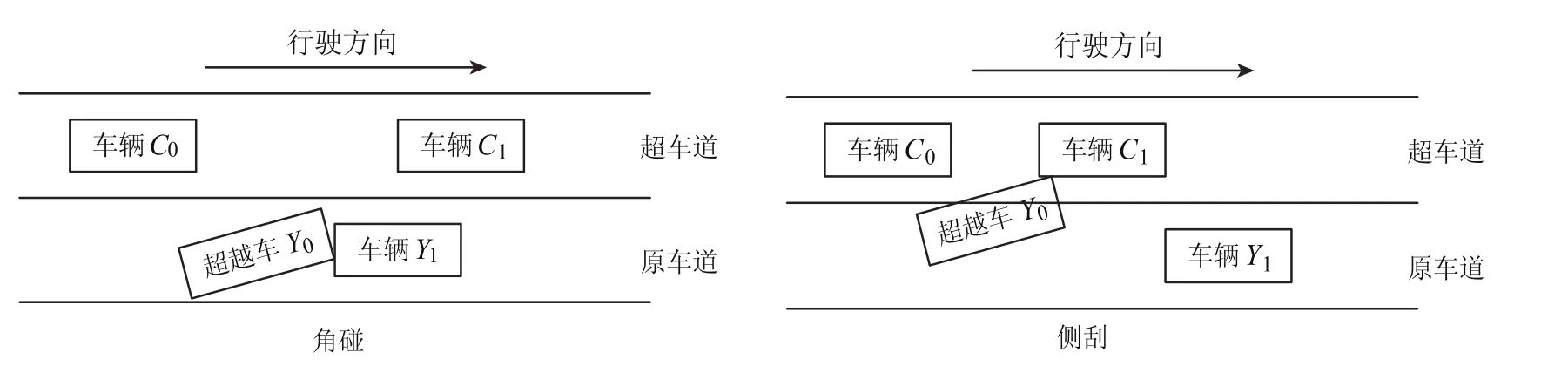
图3 超越行驶交通事故示意图Fig.3 Traffic accident during the overtaking process
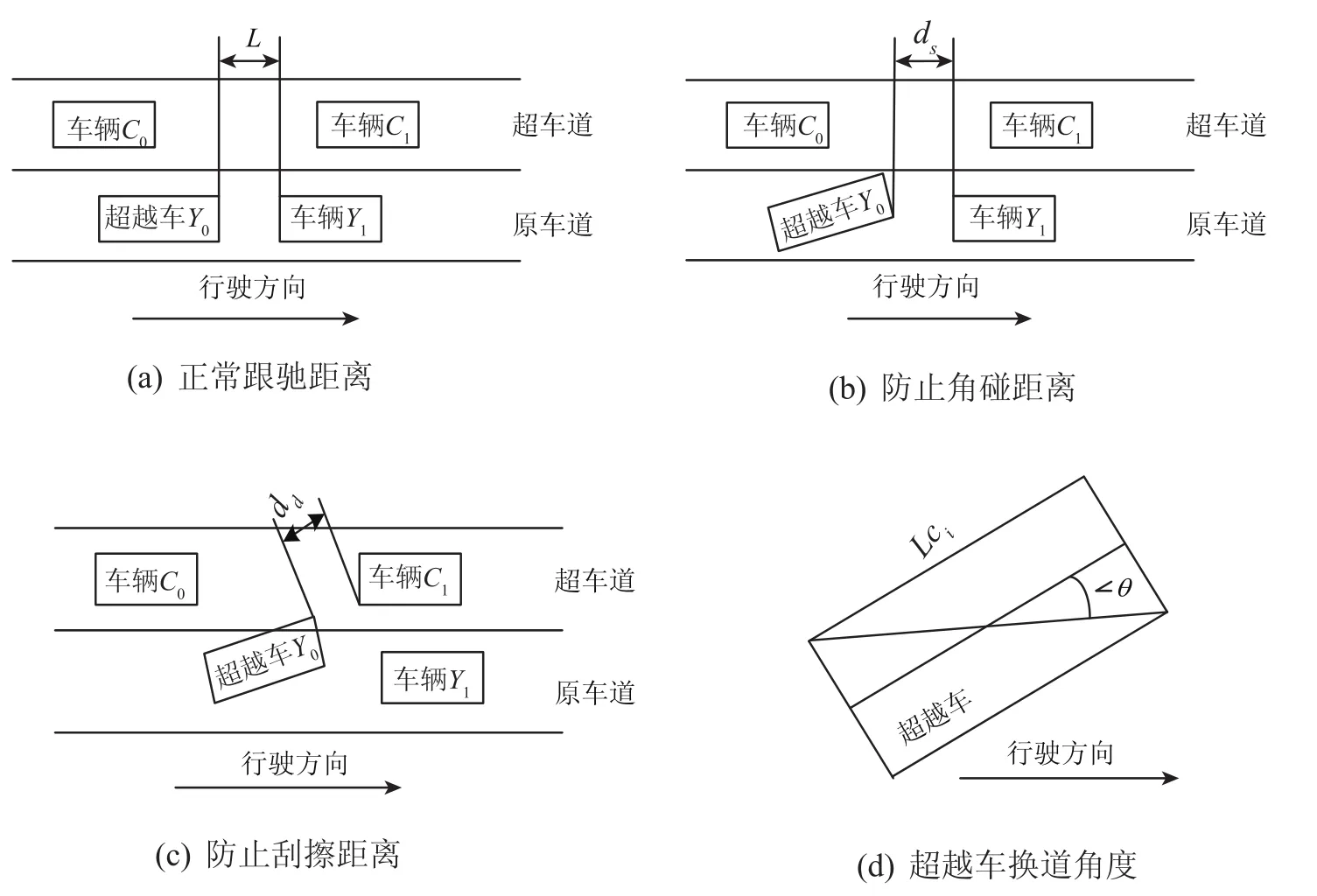
同理,超越车在进行超越行驶时,在超车车道与其前方车辆之间的安全跟驰距离dd为
3 优化模型
以超越车辆在一个超越时段内尽可能多的超越前方车辆为目标,并充分考虑车辆在跟驰行驶中的安全间距,以及超车过程中超越车与被超越车行程之间的关系,在满足约束条件的情况下,给出满足超越条件的超越车最小行驶速度及相应超越行程时间.
3.1 约束条件
三阶段的约束条件分别如下所示.
(1)换道条件.
①超越车车速满足超车道的限速条件;
②超越车与超车道前后车辆的距离满足安全需求,防止车辆侧刮;
③超越车与原车道前后车辆的距离满足安全需求,防止角碰.

式中 v表示超越车行驶速度;表示j车道限制速度;t表示时间;tc表示换道时间(换道灯闪烁时长);aaY1表示在原车道超越车辆前第一辆车的最大加速度;aaY0表示超越车的最大加速度;V0C1表示在超车道超越车辆前第一辆车的起始速度;aaC1表示在超车道超越车辆前第一辆车的最大加速度.
(2)超越条件.
①超越车车速满足超车道的限速条件;
②超越车与超车道前后车辆保持安全跟驰距离;
③超越车在换道时间段内的行程大于被其超越的在原车道行驶的第i辆车的行程与相关的安全跟驰间距及车长距离之和.

式中 to表示超越阶段时长;i表示原车道中被超越车超越的第i辆机动车,且i=1、2、3…;VtCc1表示tc时刻C1车的速度;VtYc0表示tc时刻超越车的速度; SYi表示原车道第i辆被超车在被超越阶段行驶的距离;Lci表示第i辆机动车的长度.
(3)并道条件.
①超越车车速满足原车道限速条件;
②超越车与超车道前后车辆的距离满足安全需求,防止角碰;
③超越车与原车道前后车辆的距离满足安全需求,防止车辆侧刮.

式中 ta表示并道阶段时长;VtCc
1+to表示(tc+to)时刻C1车的速度;VtYc
0+to表示(tc+to)时刻超越车的速度;VtYc
(+i+to
1)表示(tc+to)时刻原车道第(i+1)辆车的速度(第一辆未被超越车);aaY(i+1)表示原车道第(i+1)辆车的最大加速度.
3.2 优化模型
综上所述,在不同限速条件下的超车模型可表示为

式中 SY0表示超越车的行驶路程.
3.3 计算步骤
从上面的模型可以看出,不同限速条件下超车模型优化问题是一非线性有约束优化问题.本文采用迭代的思路对其进行求解,求解流程如图5所示.

图5 计算步骤示意图Fig.5 Calculation process diagram
4 模拟计算与结果分析
(1)车辆安全跟驰距离.
根据式(1)~式(9)进行模拟仿真计算,其中tr为驾驶员反应时间与制动器协调时间,一般取值约为0.8~1.0 s;td为减速度的增长时间,一般取值约为0.1~0.2 s;adY0、 adY1为车辆的最大减速度,一般取值约为6.86~7.84 m/s2;其它计算参数如表中所示[6],则有车辆安全跟驰距离计算结果如表1所示.
(2)车辆换/并道安全距离.
同理,根据式(10)~式(11)进行模拟仿真计算,其中车辆长度Lci均取4.2 m;θ取10°,则车辆在换道或并道情况下与前向车的距离计算结果如表2所示.
(3)车辆超越安全距离.
假设超越车辆在原车道(限速60 km/h)以50 km/h的速度在匀速跟驰行驶,相邻超车道(限速80 km/h)车辆以70 km/h的速度在匀速跟驰行驶,其它条件如表3中所示,超越车超越将超越前方行驶第一辆车,且超越完成后,超越车减速,并以60 km/h的速度并入原车道,则根据表1、表2可有车辆超越安全距离如表3所示.

表1 车辆安全跟驰距离计算表Table 1 Safe distance of following vehicle

表2 车辆换/并道安全距离计算表Table 2 Safe distance when the vehicle lane changing
在此条件下,超越车分别以时速60 km/h、70 km/h、80 km/h进行超越时,为能顺利完成行程并归回原道行驶,超越车与超车道前方第一辆车之间的距离最小依次为:13.82 m、17.10 m、38.61 m.

表3 车辆超越安全距离计算表Table 3 Safe distance when the vehicle overtaking
5 研究结论
本文在添加各车道不同限速的条件下,充分考虑车辆的安全跟驰距离,建立了新的超车模型,有助于车辆进行超越行驶时提供判断与辅助,保障车辆行驶的安全,对建立超车行驶辅助驾驶系统提供借鉴与基础.然而,上述模型是在设定情况下建立的,模型中的相关变量与实际存在差别,对于模型在实际中的应用及模型变量的即时采集等还有待进一步的研究.
[1]游峰.智能车辆自动换道与自动超车控制方法的研究[D].吉林:吉林大学,2005.[YOU F.Study on autonomous lane changing and autonomous overtaking control method of intelligent vehicle[D].Jilin:Jilin University,2005.]
[2]唐阳山,江振伟,白艳,等.汽车防碰撞安全距离模型及仿真研究[J].辽宁工业大学学报,2008,28(5): 324-332.[TANG Y S,JIANG Z W,BAI Y,et al. Model of vehicle safety distance for collision avoidance and simulation study[J].Journal of Liaoning University of Technology(Natural Science Edition),2008,28 (5):324-332.]
[3]徐杰,杜文,孙宏.跟随车安全距离的分析[J].交通运输工程学报,2002,2(1):101-104.[XU J,DU W, SUN H.Safety distance about car following[J].Journal of Traffic and Transportation Engineering,2002,2(1): 101-104.][4]马骏.高速公路行车安全距离的分析与研究[J].西安公路交通大学学报,1998,18(4):90-94.[MA J.A study on safe distance between the vehicles in freeway [J].Journal of Xi,an Highway University,1998,18 (4):90-94.]
[5]许伦辉,罗强,傅惠.基于前车制动过程的车辆跟驰安全距离模型[J].广西师范大学学报,2010,28 (1):1-5.[XU L H,LUO Q,FU H.Car-following safe distance model based on braking process of leading vehicle[J].Journal of Guangxi Normal University (Natural Science Edition),2010,28(1):1-5.]
[6]顾柏园.基于单目视觉的安全车距预警系统研究[D].吉林:吉林大学,2006.[GU B Y.Study on the forward collision warning system based on monocular vision[D].Jilin:Jilin University,2006.]
Overtaking Model Based on Different Limiting Speed
BAI Wei1,LI Cun-jun1,2
(1.Yuanda Engineering&Design Institute of Chengdu,Chengdu 610097,China; 2.Collage of Architecture&Environment,Sichuan University,Chengdu 610065,China)
The process of overtaking is a common phenomenon.The improper selection of overtaking time or other risk operations in driving will probably lead to traffic accidents.However,different speed limit of lanes in urban trunk road or in highway proposes higher requirements for vehicles in overtaking operations. Based on previous researches,this paper divides the whole overtaking process into three stages.It sets different speed limit of for didderent lanes with full consideration of following distance.An overtaking model for judgment and auxiliary of vehicles is developed and the goal is the safe driving and to overtake as many as vehicles during a given time.In the last section,the paper verifies the practicality of the model by an example.
intelligent transportation;overtaking model; limiting speed; safe following space; overtaking speed
U491.6
A
U491.6
A
1009-6744(2013)02-0063-06
2012-10-10
2012-11-23录用日期:2012-12-07
柏伟(1985-),男,山东枣庄人,助理工程师.
*通讯作者:43200856@qq.com
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
公民与法治(2020年17期)2020-10-27
小雪花·成长指南(2020年2期)2020-10-12
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
灾害医学与救援(电子版)(2016年4期)2016-03-11
中国交通信息化(2015年10期)2015-06-06