FlightGear无人机模拟器在C4I系统中的应用
2013-08-08 06:17马勇谭玮
中国科技信息 2013年16期
马勇 谭玮
中国电子科技集团公司第二十八研究所,江苏 南京 210017
引言
随着技术的不断成熟以及在实战中的成功应用,无人机已经确立了其在信息化作战中的重要地位,通过C4I系统对无人机进行一体化指挥控制也就成为一个热门课题。为了能够形象直观地反映C4I系统对无人机的监视和指挥控制情况,验证系统给出的任务规划、战法、控制决策等的正确性,迫切需要对无人机进行模拟仿真,并与系统进行集成,实现系统和模拟无人机之间指挥控制的动态交互过程。
由于飞机系统是一个非常复杂的系统,需要建立动力学、操纵系统、发动机系统、环境系统等仿真模型,涉及的各种参数非常多,相互之间交互又非常复杂,因而研制全新的仿真无人机系统将是一个非常复杂的过程。
FlightGear飞行模拟器是一个开放源代码、多平台的飞行模拟器发展项目。经过多年的发展,FlightGear不但以其强大的真实仿真功能吸引了众多的飞行模拟爱好者,而且其开放式的程序构架和预留的外部数据输入/输出接口,赢得了专业用户的青睐,成为众多科研部门的飞行仿真可视化引擎。由于FlightGear的上述优势,我们最终选择将FlightGear经二次开发改造成无人机模拟器,以满足模拟无人机平台的需要。
1 功能描述
经过二次开发和改造后的FlightGear,最终成为一个独立的无人机模拟作战平台,该平台能实时接收C4I系统的指控命令,模拟进行任务处理,执行作战任务,并在三维场景中加以展现,同时将产生的空情数据实时回传,从而实现与C4I系统的集成。
具体而言,改造后的无人机模拟器主要具有以下功能:
(1)实时接收来自C4I系统的指挥控制命令,控制自动驾驶仪驱动模拟无人机按指定的速度、高度、航向或指定的俯仰、滚转角进行自主飞行,实现无人机的起飞、降落、巡航、地形跟踪、载荷飞行等飞行过程;指控命令还能直接操作舵面完成筋斗、滚转等复杂机动动作;与此同时,模拟器将自身的精确定位信息和状态信息回传给C4I系统。
(2)具备逼真的三维虚拟场景,主要包括三方面:一是由地形地貌、天空背景、光照、机场、跑道、建筑等组成的战场环境,二是包括自然现象(风、雨等)和特殊场景(火焰、爆炸)等组成的特效展现,三是能进行六自由度机动的无人机的动态展现。目前,无人机模拟器的三维场景显示效果如图1所示。
(3)具有灵活的xml配置文件,使得无人机的构型、气动、发动机、自动驾驶仪等参数都是可配置的。根据实际机型进行配置后,无人机模拟器能实现对各种性能无人机的模拟。只要将待模拟无人机的相关参数提取后加入配置文件中,即可完成对无人机动力学模型的配置,而不需要额外进行软件代码改动。
(4)能够通过多个视角观察无人机飞行状态,同时显示界面下方可以看到飞机主要参数、任务数据的动态显示;界面上方呈现以无人机为中心小地图,展示无人机及其周围空情状况,同时也直观显示出截击线、方案线等任务信息。

图1 无人机模拟器三维场景显示效果
2 开发与实现过程
基于FlightGear的无人机模拟器主要由xml配置文件和软件系统构成。xml配置文件负责模拟器各个模块的参数初始化,系统启动后,首先读取配置文件,对各个模块进行注册和初始化,最后进入主循环,对各分系统模块进行实时更新。
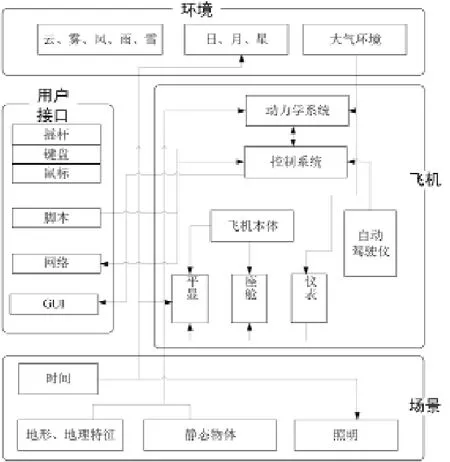
图2 FlightGear各模块结构图
软件系统主要由场景、飞机、环境和用户接口四个分系统组成。各个系统模块之间的结构关系大致如图2所示。其本身具有如下关键技术:
基于OpenGL建立的三维飞行仿真引擎,仿真功能强大,场景内容丰富、逼真,并能根据需要灵活增减三维仿真模型;
对飞机本体仿真功能强大,能逼真仿真自动驾驶仪、机舱、操控部件、电气系统、平显系统、声音声效等;
集成成熟动力学模型,实现对飞机空气动力特征的仿真和对飞机六自由度非线性运动的解算;
通过xml配置文件对各仿真系统进行参数化定义,使各仿真模型与仿真数据相互独立,从而能够根据机型的不同灵活配置和仿真。
具备统一的模型扩展接口,通过继承接口可以任意增加新的模块,从而保证模拟器良好的扩展功能。
为使无人机模拟器成为在C4I系统指挥控制下的模拟作战平台,我们一方面对模拟器本身进行了改造,满足无人机仿真需求,另一方面将模拟器进行了网络接口开发,实现与C4I系统的实时数据交互,进而实现了系统和模拟无人机之间指挥控制的闭环。
对模拟器本身进行的二次开发工作主要包括以下几方面:
构建了满足无人机模拟平台需要三维模型,包括无人机三维模型、地形模型和机场、跑道等静态物体模型;
根据待模拟的无人机的相关参数,对各个仿真模型进行参数化配置,其中主要对动力学模型和自动驾驶仪模块进行了大量配置改造工作;
增加了对C4I系统下发的飞行计划的处理功能,即对系统给出的任务数据,实时计算出应飞指令,并驱动自动驾驶仪进行处理;
增加了C4I系统直接控制指令的响应功能,如当模拟器在收到筋斗、横滚等复杂机动动作指令时,先停止自动驾驶仪控制,然后直接操作舵面实现机动;
对GUI显示进行改造,如飞机主要参数的实时显示、收到系统指令的实时显示、小地图等功能都是根据需要对FlightGear改造实现的;
针对网络接口进行开发,实现对指挥命令的接收和处理,以及对外发送空情等功能,从而达到C4I系统与无人机模拟平台实时数据交互的目的。
网络接口开发主要增加了模拟器对C4I系统的指令接收接口和模拟器状态对外发送的接口,使系统与模拟器实现数据交互,主要内容包括启动、停止命令的响应,对系统下发的指挥控制命令的接收和处理、实时空情向系统回送等。通过网络接口开发,目前实现的数据交互模型如图3所示。
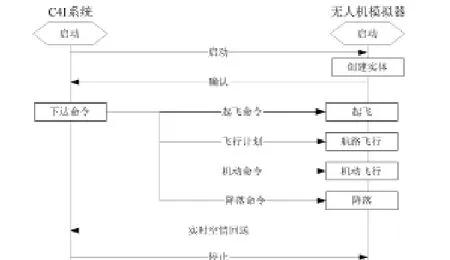
图3 C4I系统与无人机模拟器数据交互模型
3 结束语
基于FlightGear的无人机模拟器平台可以根据C4I系统对无人机指挥控制的需求,达到C4I系统对无人机进行模拟监视和指挥控制的功能。目前该平台已开始用于向客户进行推介,并取得良好效果。由于具有强大的扩展性能,可以预期,该平台必将得到推广,获得广阔的应用前景。
[1]Graig R Husby. Path Generation Tactics for a UAV Following a Moving Target, Master thesis[D]. Washington: Dept of Aerospace Engineering, University of Washington, 2005
[2]刘泽坤,昂海松,罗东明. 基于DirectX的无人机实时仿真系统开发 [J]. 系统仿真学报,2006,18(4): 918-920
[3]黄华,徐幼平,邓志武. 基于FlightGear模拟器的实时可视化飞行仿真系统 [J]. 系统仿真学报,2007,19(19):4421-4423
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24
小哥白尼(趣味科学)(2021年6期)2021-11-02
电脑爱好者(2021年11期)2021-06-07
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
电脑爱好者(2020年9期)2020-07-05
电脑爱好者(2019年20期)2019-12-10
铁路计算机应用(2018年10期)2018-11-09
中国惯性技术学报(2018年4期)2018-11-08
导航定位与授时(2016年1期)2016-03-16