
基于维纳滤波的探地雷达信号提高分辨率研究
2013-08-20 01:00杨秋芬
科技视界 2013年27期
杨秋芬
(西安文理学院 物理与机械电子工程学院,陕西 西安710065)
0 引言
探地雷达可穿介质表面对其内部分层结构进行识别, 以其高精度,无损,直观,快速的优点越来越多地被应用到道路质、桥梁等量检测评估中。 提高探地雷达信号分辨率一直是该领域的研究热点之一。
1 模型的构成
探地雷达Ascan 记录在数学上可以由下式的褶积模型近似表示[1]:

其中x(t)为观测到的探地雷达记录,w(t)是仪器发射探的地雷达子波,e(t)代表地层脉冲响应(地下介质的反射系数序列),n(t)表示环境噪声。 这里的环境噪声一般为白噪声。 褶积模型的实际意义在于把复杂的波动过程简化为一个线性系统问题。
2 反褶积
接收到的探地雷达信号是带限的,使得厚度较小的反射层不易识别。 为了从x(t)中估计e(t),必须消除或减弱探地雷达子波w(t)的影响。这种消除探地雷达子波影响的过程是探地雷达记录褶积过程的反过程,故称之为反褶积过程。反褶积是恢复反射序列的过程,其目标是最大限度地压缩子波,得到反射系数序列[2]。
当假设褶积模型中噪声成分为零,震源波形已知时,可以把方程简化为:

目标函数为e(t),类似于滤波的过程,如果能找到一个滤波算子f(t), 使得

代入方程

将两边消去,将会得到w(t)与f(t)的乘积是零延迟脉冲:

故褶积记录计算的地层脉冲响应所需的滤波算子就是探地雷达子波w(t)在数学上的逆。 求解方程,可得到反滤波算子,

反滤波是反褶积的一种方法,以输入子波波形已知为条件,可将反滤波看作为是确定性反褶积。
3 最佳维纳滤波
维纳在最小平方反滤波器的设计基础上,推导出了将输入转换为任意输出(反褶积指的是将输入子波转化为零延迟脉冲的过程)的、应用范围更广的滤波器求解方法[3-4]。
当滤波器长度为n 时,矩阵方程的普遍形式为:
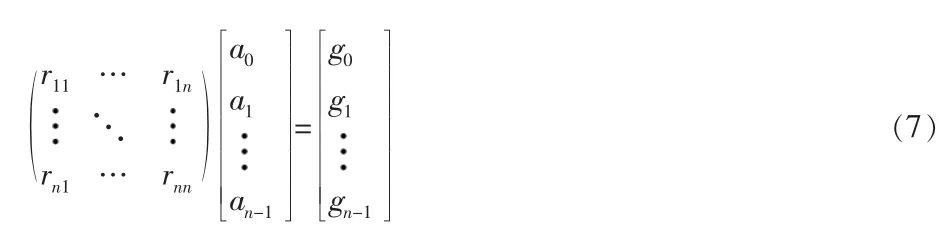
其中,[a]是维纳滤波方法得到的反滤波系数,[g]是期望输出(零相位脉冲延迟)输出与输入子波的互相关。 [r]是输入子波的自相关矩阵。
4 实验结果
仿真数据共三层介质:其中第一层介电常数ε=4,模拟混凝土层,厚度25cm;第二层ε=6,模拟水泥层,厚度20cm;在第二层以下为无限大的基层ε=9,模拟土层。 采用250MHz Ricker 子波作为探地雷达子波,如图1(a)所示。 地层反射系数序列为图1(b),图1(c)为探地雷达合成记录,图1(d)为采用最佳维纳滤波方法,由图1(c)得到的反褶积记录,可以看出子波得到了压缩,分辨率能力得到了提高。

图1
图1 仿真结果:(a) Ricker 子波; (b)反射系数序列; (c) 褶积记录;(d)反褶积结果。
[1][美]渥·伊尔马兹.地震资料分析[M].刘怀山,等,译.北京:石油工业出版社,2006:123-215.
[2]张贤达.时间序列分析[M].北京:清华大学出版社,1996:1-24.
[3][美]David k.Barton 雷达系统分析与建模[M].北京:电子工业出版社,2005:24-98.
[4]Levent M.Arslan.Modified Wiener filtering [J]. Signal Processing,2006,86:267-272.
猜你喜欢
数学物理学报(2021年6期)2021-12-21
舰船电子对抗(2019年4期)2019-09-10
太原科技大学学报(2019年3期)2019-08-05
计算机应用与软件(2017年3期)2017-04-14
洛阳师范学院学报(2017年2期)2017-03-12
广东石油化工学院学报(2016年6期)2016-05-17
采矿与岩层控制工程学报(2015年3期)2015-12-16
西南石油大学学报(自然科学版)(2015年5期)2015-04-16
振动、测试与诊断(2014年1期)2014-03-01
中国海洋大学学报(自然科学版)(2014年11期)2014-02-28
