舰艇编队中攻击型潜艇阵位配置模型
2013-08-26 02:47朴成日沈治河
舰船科学技术 2013年7期
朴成日,沈治河
(1.海军大连舰艇学院作战与训练系,辽宁 大连 116018;2.海军大连舰艇学院 科研部,辽宁 大连 116018)
0 引言
舰艇编队中的攻击型潜艇是有效的反潜兵力,其反潜能力远优于水面舰艇和反潜直升机。攻击型潜艇的优势在于:①行动隐蔽,自给力和作战半径大;②在有利的听测水层,远距离发现敌潜艇;③能在各种气象条件下,有效地搜索、跟踪和攻击敌潜艇。因此,研究编队中攻击型潜艇的配置,提高编队对潜防御能力具有重要的理论价值和军事意义[1]。
1 攻击型潜艇阵位配置的基本要求
明确攻击型潜艇的任务是配置的前提。攻击型潜艇通常配置在远程防潜区域,其主要任务是:为编队提供早期防潜预警、搜索和攻击企图占领导弹射击阵位的敌潜艇;在舰艇编队进入某一作战区之前,攻击型潜艇对该作战区实施严密的反潜清扫,当确认无敌潜艇后,编队方可高速进入阵位。根据攻击型潜艇承担的任务和自身的特点,其配置必须满足以下基本要求:① 前出距离能为编队提供一定的防潜纵深;②攻击型潜艇对空防御能力弱,前出的距离需要在编队歼击机的有效掩护范围内;③ 在编队进入阵位之前,攻击型潜艇有充足的时间对作战区实施严密的反潜清扫;④阵位配置需要考虑安全因素,避免误伤;⑤在编队通信范围之内[2]。
舰艇编队兵力的配置需要确定参考的基准点,而这个基准点与编队的状态有关。如果编队在航渡中,相对基准点是指挥舰;如果编队在某一作战区,相对基准点则是作战区的圆心。攻击型潜艇的配置,用相对于基准点的前出距离和方位2个要素来描述。攻击型潜艇配置的方位以编队的威胁轴为基准,威胁轴的确定由指挥员根据敌情威胁判断决策,本文把攻击型潜艇前出相对于基准点的距离作为重点来讨论。
2 攻击型潜艇阵位配置模型
2.1 基于远程防潜攻击型潜艇阵位配置模型
攻击型潜艇配置在远程防潜区域,其目的是为了搜索和攻击企图占领反舰导弹发射阵位的敌潜艇[3]。
为了保证攻击型潜艇能在敌潜艇占领反舰导弹发射阵位之前,对其及时发现、识别并实施攻击,要求攻击型潜艇发现敌潜艇的界线称为远程防潜警戒线[4]。警戒线到基准点的距离称为远程防潜警戒线距离。
攻击型潜艇搜索和攻击敌潜艇的作战过程可以描述为:O点为参考基准点,攻击型潜艇前出配置在B点,探测到不明潜艇在E点,BE之间的距离为攻击型潜艇的探测距离,OE之间的距离为远程防潜警戒线距离。经过识别确认是敌潜艇后,指挥员定下决心、确定作战方案,这个过程持续时间为t1;攻击型潜艇机动到C点占领鱼雷射击阵位,这个过程持续时间为t2;在鱼雷最大有效射程上发射,在D点鱼雷与敌潜艇相遇,这个过程持续时间为t3。经过t1+t2+t3后,指挥舰航行到A点,AD之间的距离应大于敌潜艇反舰导弹最大射程,即在敌潜艇占领导弹射击阵位前,攻击型潜艇对其至少完成1次攻击,如图1所示。
关系式为:

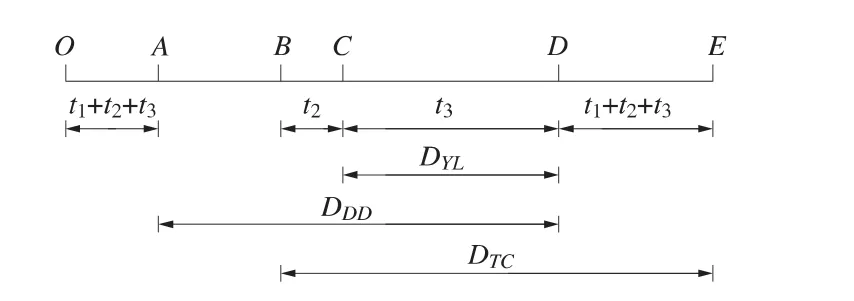
图1 远程防潜作战过程图Fig.1 The process of long-range anti-submarine operation
式中:DTC为攻击型潜艇对敌潜艇探测距离;VWQ为攻击型潜艇巡航速度;VDQ为敌潜艇巡航速度;DYL为攻击型潜艇鱼雷最大有效射程;DDD为敌潜艇反舰导弹最大有效射程;DOB为O与B两点之间的距离;VH为编队航速;VYL为鱼雷航速。
从作战过程描述可以看出,攻击型潜艇提供防潜纵深应该大于远程防潜警戒线距离DOE,即前出距离应该大于DOB。
如果编队在航渡中,攻击型潜艇的阵位配置应该是相对于基准点的一个点,前出距离大于DOB,即提供的防潜纵深大于DOE。攻击型潜艇的前出距离、探测距离、防潜纵深和防潜扇面角度构成了三角函数关系,如图2所示。

图2 航渡中攻击型潜艇阵位配置示意图Fig.2 The disposition of attack submarine in navigation
关系式为

其中α为攻击型潜艇提供的防潜扇面角度。
如果编队在某一作战区,攻击型潜艇的配置应该是一条巡逻线,潜艇在该巡逻线上往返航行巡逻警戒。巡逻线长度与前出距离、防潜纵深和防潜扇面角度之间的关系,如图3所示。
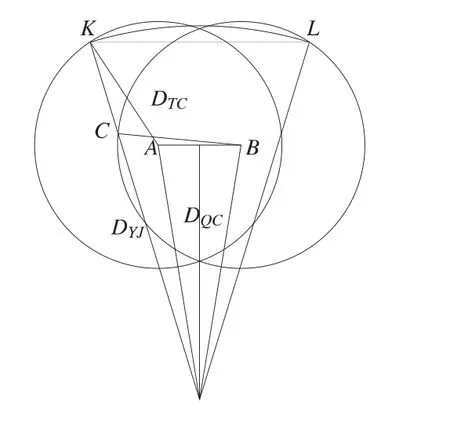
图3 作战区攻击型潜艇阵位配置示意图Fig.3 The disposition of attack submarine in theatre of war
设直线AB为巡逻线,与威胁轴垂直,图中2个圆分别是攻击型潜艇在巡逻线2个端点A和B的探测范围,这样扇面HKL则是攻击型潜艇的防潜扇面。在攻击型潜艇前出距离确定的情况下,其提供的最大防潜纵深为

式中:DQC为攻击型潜艇巡航时阵位相对于基准点距离的最大值;DAB为巡逻线AB的长度。
攻击型潜艇的前出距离、巡逻线长度与提供的防潜纵深、防潜扇面角度存在关系式:
其中:DYJ为攻击型潜艇在威胁方向上提供的对潜预警距离;φ为攻击型潜艇提供的防潜扇面角度,以基准点为圆心,以DYJ为半径。
当攻击型潜艇在巡逻线上从A点航行到B点,预警扇面边缘KH上的CH段依然在攻击型潜艇的监视范围内。如果作战区半径为R,应该保证CH长度大于 (DOE+R),即在敌潜艇占领反舰导弹射击阵位之前,攻击型潜艇已对敌潜艇实施攻击。关系式如下:
其中DCH为点C到点H之间的距离。
2.2 基于空中掩护攻击型潜艇阵位配置模型
在众多的反潜平台中,能在短时间内迅速对攻击型潜艇构成威胁当属反潜飞机,而防空作战恰恰是攻击型潜艇的短板。从系统的角度看,编队是一个作战大系统,应该为系统中的攻击型潜艇提供空中掩护。掩护方式可以分为空中待战与机场待战2 种[5]。
空中待战掩护过程可以描述为:O点为参考基准点,预警机前出配置在A点,歼击机前出配置在B点,攻击型潜艇前出配置在D点。预警机发现敌反潜飞机在F点,AF之间的距离为预警机的探测距离。经过识别确认是敌机后,向编队发出警报,这个过程持续时间为t1。指挥引导歼击机前出迎敌,占领攻击阵位C点,这个过程持续时间为t2。在空空导弹最大有效射程上发射,在E点导弹与敌机相遇,DE之间的距离应大于敌反潜飞机对攻击型潜艇的攻击距离,即在敌机对攻击型潜艇使用武器之前,歼击机对敌反潜飞机至少完成1次攻击,如图4所示。
图4 空中待战掩护过程图Fig.4 The process of covering provided by fighter through airborne alert
得出以下关系式:
式中:DBC为歼击机前出迎敌距离;DTC为预警机对敌反潜巡逻机的探测距离;DWKK为我空空导弹最大有效射程;DDGJ为敌反潜巡逻机对潜艇的最大攻击距离;VJJJ为歼击机的航速;VDJ为敌反潜巡逻机的航速。
当歼击机采取空中待战掩护方式时,攻击型潜艇的前出距离不能大于DOD。
歼击机以机场待战方式掩护攻击型潜艇,当预警机发现敌机后,歼击机从机场起飞前出迎敌,这种情势如图5所示。可以描述为:攻击型潜艇配置在C点,当预警机在A点巡航时发现了敌机在E点,AE之间的距离为预警机的探测距离。经过识别确认是敌机后,向编队发出警报,这个过程持续时间为t1。指挥员收到警报、定下决心、下达歼击机起飞命令,机场待战歼击机接到出动命令后首架开始起飞,这个过程持续时间为t2。歼击机起飞后并完成空中集合所需时间为t3。编队飞行一段时间后,到达B点占领攻击阵位,这个过程持续时间为t4。在空空导弹最大有效射程上发射,在D点导弹与敌机相遇。DC之间的距离应大于敌反潜巡逻机最大攻击距离,即在敌机对攻击型潜艇使用武器之前,歼击机对敌反潜飞机至少完成1次攻击。
图5 机场待战掩护过程图Fig.5 The process of covering provided by fighter through airport alert
得出以下关系式:
当歼击机采取机场待战掩护方式时,攻击型潜艇的前出距离不能大于DOC。
2.3 基于反潜清扫攻击型潜艇阵位配置模型
当舰艇编队在某一作战区存在敌潜艇威胁时,攻击型潜艇根据指挥所的指挥,预先适时配置在该作战区内,进行先期反潜清扫。攻击型潜艇直接抵达作战区附近待机或从航渡过程中转入作战区附近待机,然后根据编队指挥所指挥,在规定时刻进入该区域,选择有利的搜索航速、搜索方式和搜索深度进行反潜搜索,待编队兵力抵达安全线时,攻击型潜艇正好完成对作战区的反潜清扫,接着攻击型潜艇迅速撤离该区域,转为编队远程反潜力量。
当攻击型潜艇在作战区内以指定概率搜索时,潜艇的搜索时间一般与搜索面积、敌我双方潜艇声呐探测距离及敌我双方潜艇航速有关[6]。关系式为:
式中:T为攻击型潜艇以指定概率对作战区敌潜艇的搜索时间;P为上级指定攻击型潜艇在作战区对敌潜艇的搜索概率;S为作战区面积;dW为攻击型潜艇声纳作用距离;dD为敌潜艇声纳作用距离;DGB为敌潜艇规避距离,一般取值为0.6~0.8 dD;VWQ为攻击型潜艇航速;VDQ为敌潜艇航速。
攻击型潜艇需要比舰艇编队其他兵力提前T,进入作战区入口开始实施反潜清扫。
2.4 基于安全因素攻击型潜艇阵位配置模型
从安全角度考虑,为了避免误伤,要求攻击型潜艇阵位与舰艇编队其他舰艇阵位之间的距离必须大于安全距离L。表达式为

式中:dmax为攻击型潜艇或己方其他舰艇,发现对方的最大距离;ξ1为攻击型潜艇的舰位误差;ξ2为己方其他舰艇的舰位误差;δ为攻击型潜艇或己方其他舰艇设定的缓冲距离。
3 攻击型潜艇行动方法
攻击型潜艇在阵位内行动可以采取2种方式:一种是攻击型潜艇机动搜索,潜艇的平均航速同编队的航速相同,这种方法称为直接伴随法;另一种是检扫伴随法,即在舰艇编队航速较高时,攻击型潜艇为保证先敌发现而采取“高、低、高”的航速,对编队正前方或前方翼侧进行检查性搜索。直接伴随法比较简单,不必多做讨论,但检查性搜索需要做进一步的讨论。该方法是利用拖曳线列阵声呐探测距离远的优势,实施低速搜索、高速航行,从而提高搜索效率。高速航行的时间应满足[7]:
式中:VWD和VWG分别为攻击型潜艇低速搜索和高速跳跃时的速度;TD和TG分别为对应低、高速航行的时间。
4 实例仿真分析
首先设定基本作战参数:攻击型潜艇对敌潜艇探测距离为30 km,巡航速度为18 kn;鱼雷航速为40 kn;最大有效射程为15 km,编队航速为18 kn,作战区半径为30 km,有可靠的通信保障;预警机对敌反潜巡逻机的探测距离为400 km,前出距离200 km;歼击机的航速为300 m/s,前出距离为250 km;空空导弹最大有效射程为100 km,速度4 Ma;敌反潜巡逻机航速为140 m/s,对潜艇的最大攻击距离为10 km;敌潜艇巡航速度为8 kn,反舰导弹最大有效射程为130 km,敌潜艇声呐作用距离为20 km。反潜作战中,指挥员确定作战方案,持续时间为3 min;防空作战中,预警机发现敌机后,综合识别并发出警报时间为30 s,指挥员收到警报、定下决心、下达歼击机起飞命令,机场待战歼击机接到出动命令后首架开始起飞,这个过程持续时间为5 min;歼击机起飞后并完成空中集合所需时间为3 min;上级指定攻击型潜艇在某一作战区对敌潜艇的搜索概率为0.9,作战区面积为3000 km2,敌潜艇规避距离取值为0.7dD;攻击型潜艇或己方其他舰艇,发现对方的最大距离为30 km,攻击型潜艇的舰位误差为1 km,己方其他舰艇的舰位误差为1 km,攻击型潜艇或己方其他舰艇设定的缓冲距离为3 km。
基于想定,根据式(1)~式(6)计算,DOB=123 km,航渡中远程防潜警戒线距离DOE=153 km,作战区远程防潜警戒线距离为183 km。当编队在航渡中时,攻击型潜艇前出距离必须大于123 km,才能保证在威胁方向上的对潜远程警戒;同理,当编队在作战区时,攻击型潜艇前出距离必须大于153 km。
根据式(15)~式(19)计算,歼击机采用空中待战掩护方式,攻击型潜艇的前出距离不能大于500 km;根据式(20)~式(23)计算,歼击机采用机场待战掩护方式,攻击型潜艇的前出距离不能大于375 km。
根据式(24)~式(25)计算,T=21 h,攻击型潜艇需要比舰艇编队其他兵力提前21 h进入作战区入口开始实施反潜清扫;根据式(26)计算,安全距离为35 km。
当编队在航渡中,根据式(7),对攻击型潜艇前出距离分别为130,150,……,490,510 km进行仿真计算,攻击型潜艇提供的防潜纵深和防潜扇面角度之间的关系如图6所示。
当编队在某一作战区中,根据式(9)~式(14),对攻击型潜艇前出距离分别为160,180,……,480,500 km进行仿真计算,攻击型潜艇提供的防潜纵深和防潜扇面角度之间的关系如图7所示,防潜纵深和巡逻线长度之间的关系如图8所示。
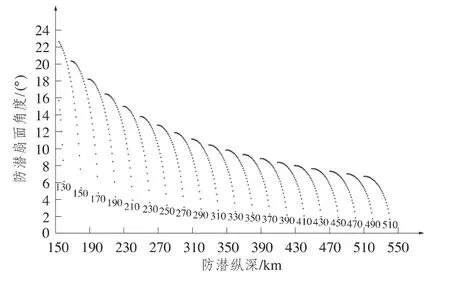
图6 航渡中防潜扇面角度随防潜纵深变化图Fig.6 The relation between the covering angle and the range for submarine defense in navigation

图7 作战区中防潜扇面角度随防潜纵深变化图Fig.7 The relation between the covering angle and the range for submarine defense in theatre of war
从图6和图7可看出,由于攻击型潜艇探测发现目标距离较小以及前出距离较大,所以提供的防潜扇面角度较小,只能提供所在方位附近的对潜预警。从图8可看出,攻击型潜艇前出距离一定时,防潜纵深随巡逻线长度的增大而增大。
如果攻击型潜艇运用检扫伴随法行动,采取“高、低、高”的航速,根据式 (27) ~式 (28),对高速分别为20,22,……,28,30 kn,低速分别为4,6,……,8,10 kn进行计算,对应的高速和低速航行时间如表1所示,单位min。
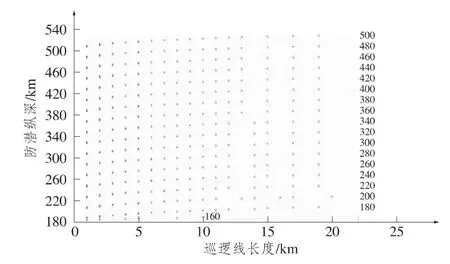
图8 防潜纵深随巡逻线长度变化图Fig.8 The relation between the range of submarine defense and the length of patrol line
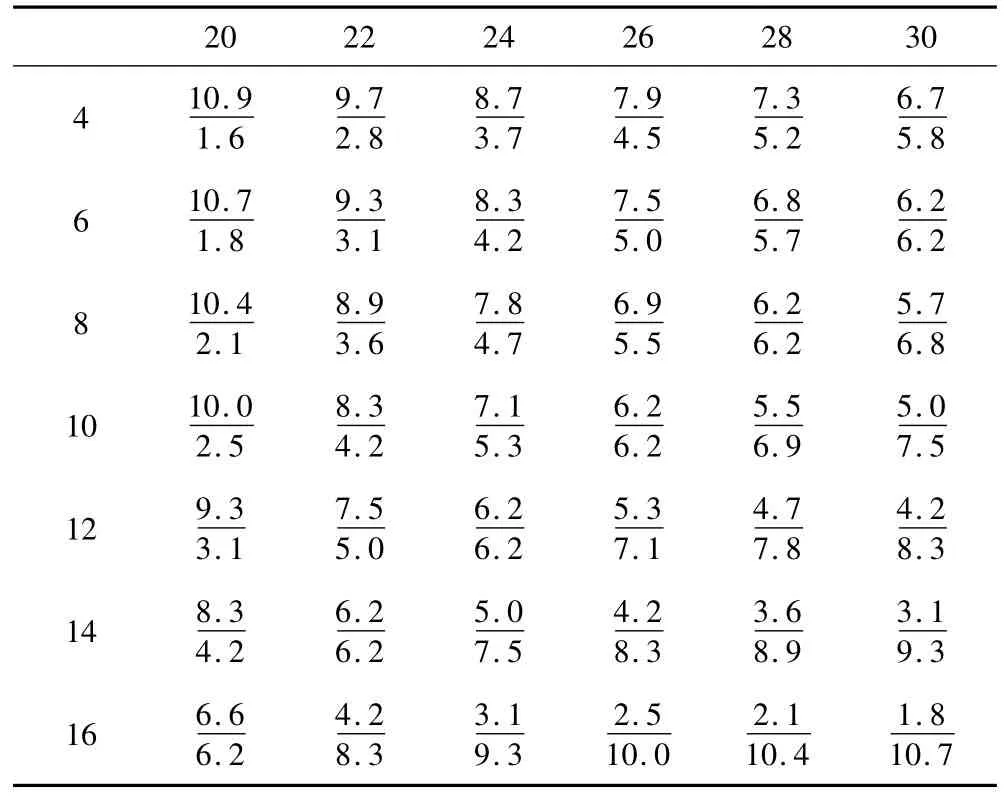
表1 不同航速下对应的航行时间Tab.1 Sailing time under different speed
5 结语
通过对攻击型潜艇阵位配置方法的探讨,结合实例仿真可以看出;编队远程防潜需求、空中掩护方式等因素影响了攻击型潜艇的前出距离,攻击型潜艇的探测能力和前出距离对提供的防潜纵深和防潜扇面角度产生影响。通过分析诸多影响因素,本文运用解析法建立了攻击型潜艇阵位配置模型,为舰艇编队攻击型潜艇阵位配置提供了参考依据。
[1]陈国宾,吴晓海.雷达哨舰在编队对空预警中的前出阵位研究[J].指挥控制与仿真,2008,30(4):30-33.CHEN Guo-bin,WU Xiao-hai.Research on the disposition of radar picket frigate formation aerial warning[J].Command Control& Simulation,2008,30(4):30 -33.
[2]谭安胜,邱延鹏,汪德虎.新型驱护舰编队防空队形配置[J].火力与指挥控制,2003,28(6):5 -9.TAN An-sheng,QIU Yan-peng,WANG De-hu.Investigation on air defense disposition for formation of new type of destroyer and escort vessels[J].Fire Control & Command Control,2003,28(6):5 -9.
[3]贺扬清,沈治河.大型水面舰艇编队航渡中直接反潜警戒舰阵位仿真研究[J].指挥控制与仿真,2010,32(4):38-41.HE Yang-qing,SHEN Zhi-he.Simulation research on the position of anti-submarine vessel for the large surface ship formationsin navigation[J].Command Control &Simulation,2010,32(4):38 -41.
[4]赵小龙,吴晓锋.航母编队反潜声纳舰阵位确定方法研究[J].指挥控制与仿真,2007,29(3):45 -48.ZHAO Xiao-long,WU Xiao-feng.How to determine the position of anti-submarine sonar warship in aircraft carrier formation[J].Command Control & Simulation,2007,29(3):45-48.
[5]徐圣良,吴晓锋.舰艇编队进入综合作战区后巡逻机阵位研究[J].舰船电子工程,2008,28(3):43 -45.XU Sheng-liang,WU Xiao-feng.Research on the position of patrol plane carrier formation in combined theatre of war[J].Ship Electronic Engineering,2008,28(3):43 -45.
[6]李瑛诺,吉春生,王继兵.潜艇为编队阵地入口实施反潜警戒的配置研究[J].科技创新导报,2009,3(2):20.LI Ying-nuo,JI Chun-sheng,WANG Ji-bing.Study on the disposition of submarine to perform antisubmarine warning for formation in entrance to battle field[J].Science and Technology Innovation Herald.2009,3(2):20.
[7]孙涛,郭岩,薛钰娟.拖曳声纳搜潜使用方法研究[J].舰船电子工程,2009,29(4):152 -154.SUN Tao,GUO Yan,XUE Yu-juan.Study on the using of towed liner array sonar[J].Ship Electronic Engineering,2009,29(4):152 -154.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
北京航空航天大学学报(2021年4期)2021-11-24
小学科学(学生版)(2019年6期)2019-07-10
兵器知识(2018年5期)2018-05-30
无人机(2017年10期)2017-07-06
现代兵器(2017年6期)2017-06-28
现代兵器(2016年9期)2016-09-14
畅谈(2016年5期)2016-07-04
现代防御技术(2016年1期)2016-06-01
中国疗养医学(2009年3期)2009-03-23