
自主移动机器人避障算法研究及展望
2013-09-03 10:51张玉婷邹彤雯王艳丽任滨侨
黑龙江科学 2013年7期
张玉婷,邹彤雯,王艳丽,任滨侨
(黑龙江省科学院高技术研究院,哈尔滨150020)
自主移动机器人是机器人研究领域的核心内容之一,其研究集中体现了一个国家自动化、智能化研究水平的高低,它的研究跨机械、电子、通信等多学科、多领域。自主移动机器人综合运用传感器技术、信息处理技术、无线通信技术、机电一体化技术等前沿科技。随着科学技术的不断发展,移动机器人技术也在日新月异,可以说,移动机器人的研究水平是一个国家科技发展水平、国防工业技术的高度体现[1-2]。
1 自主移动机器人的关键技术
自主移动机器人研究,涉及信息融合技术,通信技术,机电一体化技术等领域,而且随着研究的不断深入,会有更多的新技术得到应用。自主移动机器人研究领域应用较为广泛的技术有:
结构体系优化技术。采用分布式结构可以提高移动机器人的实时性和准确性。
多传感器信息融合技术。单一传感器的应用只能获取单一的外部信息,这就要求把多种类、多数量的传感器综合起来应用,对多个传感器读取的信息数据加以融合,以期得到准确的环境信息,从而建立精确的外部环境模型[3]。
导航与定位技术。在机器人运动过程中,定位分为两种,一种是全局定位,一种是机器人姿态定位[4],全局定位是机器人在起始点与目标点之间的位置确定;姿态定位是确定移动机器人导航角和相对于坐标原点的距离。
2 自主移动机器人避障算法
在移动机器人的运动过程中,机器人能否主动避开前方的障碍物,寻找出一条到达目标点的安全路径,是机器人能否实现自主作业的关键,直接影响到机器人的智能。移动机器人的避障算法按照其对外部环境的感知状态可以分为两种,第一种是外部环境先验的全局规划,第二种是通过传感器系统建立外部环境模型的局部规划,也就是实时路径规划。
典型的避障算法包括:
2.1 人工势场法
人工势场法的原理是把机器人的运动看成是在虚拟力场中的运动,当移动机器人靠近障碍物时,它们之间产生斥力场,且离得越远斥力越小。但是总体上移动机器人和终点产生的是引力场[3]。移动机器人通过斥力场躲避前方出现的障碍物,通过引力场朝向目标点前进,这种势力场是虚拟力场,但是对于机器人的自动导航有着良好的效果。
人工势场法的优点:该算法思路简单清晰、结构简洁,而且便于底层的实时控制,避障程序的编写也较为方便。
人工势场法的缺点:容易产生局部最小值问题,当移动机器人运动到墙角及狭窄地带容易产生锁死现象,而且当两个障碍物之间的距离较近的时候,该算法难以发现躲避路径;另一个缺点是势场力决策选择时,移动机器人在障碍前容易产生振荡现象,难以保证避障的平稳性。
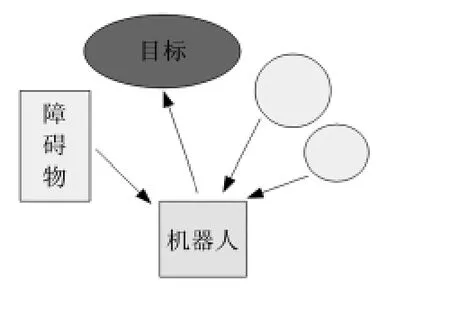
图1 人工势场法原理图Fig.1 The schematic of artificial potential field method
2.2 A* 算法
A*算法是一种启发式的避障算法,基本原理可以概括为动态最短路径法。A*算法利用空间启发式信息,通过对比选择恰当的估价函数,然后通过动态搜索策略,求出移动机器人的最优规划路径,A*算法可以分成两类,基于C空间的A*算法和基于四叉树的A*算法[5]。
A*算法的优点:算法引入了启发式函数,减少了搜索的环境空间、有很高的搜索效率,将该算法应用到移动机器人的自主避障于导航上有很好的实时性。
A*算法的缺点:算法搜索出的路径比较粗糙,是一个可行性路径,但是路径的优化性较差,而且对于比较复杂的未知环境,其搜索效率并不高。
2.3 RRT 算法
RRT算法是快速扩展随机数算法的简称,该算法采用了随机查询采样的搜索方法,随机采样的意思是指不建立外部空间映射,而是经过一个优化策略对外部空间进行信息采样,然后执行最佳路径策略。
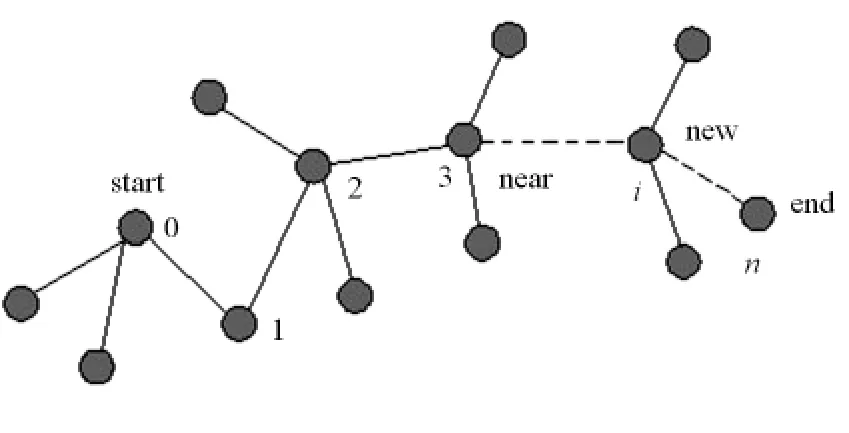
图2 随机树拓展搜索Fig.2 Expand search by random tree
2.4 滚动窗口避障算法
滚动窗口避障算法是一种基于预测理论的寻优算法,该算法的原理是移动机器人搭载了多传感器系统,通过该系统在机器人前方建立半径为R的滚动窗口,该窗口实时探测障碍物信息并建立外部环境模型,然后通过启发式算法生成优化子目标,并且做出相应的避障策略,滚动窗口不断更新外部环境信息,产生多个优化子目标,每个优化子目标点的叠加,使机器人到达终点[5]。
滚动窗口算法的优点:搜索出的避障路径较为优化,使移动机器人能够很好地避开障碍物,并且算法简洁、信息存储量小,机器人的实时性较好。
滚动窗口算法的缺点:在复杂的环境中移动机器人容易产生局部极小值。

图3 滚动窗口的建立Fig.3 The establishment of a scrolling window
表1为常用的避障算法进行综合对比说明。
3 自主移动机器人避障算法的发展方向
以往研究的移动机器人避障算法,自身的局限性较大,而且受到传感器技术的制约,有些算法在移动机器人的实际应用中难以实现。未来在移动机器人避障算法的研究领域,要把算法的理论性与实际应用性结合起来,实现机器人搜索路径的高效性、实用性、优化性,这种模式是未来机器人算法的发展趋势。
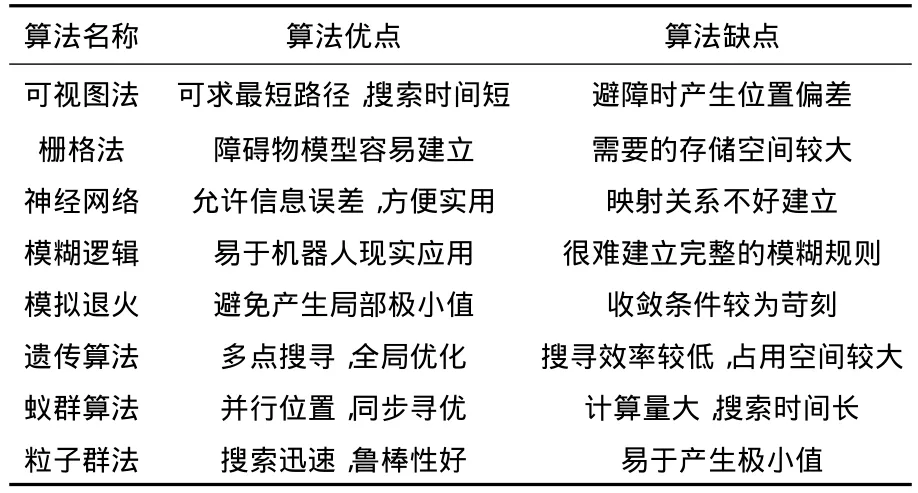
表1 移动机器人避障算法汇总Tab.1 The summary of obstacle avoidance algorithm for mobile robot
综合考虑各种因素及以往多方面的研究,未来自主移动机器人避障算法将会朝着以下方向发展:
(1)智能算法在未来的研究中将不断创新和改进。传统算法都有其自身的局限性,只适合在特定的条件下应用,这就要求未来的研究要朝着算法融合的方向发展,把各种算法的优良性能融合到一起。
(2)在移动机器人自主避障与导航领域,多传感器信息融合技术将得到广泛的应用。传感器系统为机器人提供环境信息,多传感器信息融合技术可以使机器人建立更加准确的外部环境模型,以供机器人做出导航策略。
(3)动态未知外部环境的研究将成为热点。在以往避障算法的研究中,主要以静态外部环境的研究为主,以动态外部环境的研究为辅,显然动态外部环境更加贴近现实,更具有现实应用意义。以往关于动态障碍物的研究,是基于动态障碍物匀速直线运动这一假设的,因此动态障碍物多种类、多数量、速度随机、方向随机的研究将是移动机器人自主避障研究领域的重点课题。
4 结论
笔者主要针对移动机器人的避障算法进行了深入研究,通过对不同算法的优、缺点的比较与分析,对未来自主移动机器人避障算法的研究方向进行了探讨。研究结果表明,不同算法的融合技术、多传感器融合技术及动态未知环境下的移动机器人自主避障研究将是移动机器人避障算法研究的重点领域。
[1]任立敏.基于激光测距仪的移动机器人避障感知与避障策略研究[D].哈尔滨:哈尔滨工业大学,2007.
[2]唐鸿儒,宋爱国.基于多传感器信息融合的侦察机器人模糊路径跟踪行为研究[J].传感技术学报,2007,20(8):1809—1814.
[3]冯建农,柳明,吴捷.自主移动机器人智能导航研究进展[J].机器人学报,1997,19(6):468—473.
[4]Motamed C,Wallart O.A Temporal Fusion Strategy for Cross-Camera Data Association[J].Pattern Recognition Letters,2007,28(2):233—245.
[5]丛岩峰,基于滚动优化原理的路径规划算法研究[J].长春:吉林大学,2007.
[6]何伟烽,自主式移动机器人路径规划研究及软件仿真实现[D].西安:西安电子科技大学,2011.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
制造技术与机床(2017年3期)2017-06-23
中小企业管理与科技·下旬刊(2016年12期)2017-01-17
中国检察官(2015年14期)2015-02-27
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
城市道桥与防洪(2014年5期)2014-02-27
天津大学学报(社会科学版)(2013年4期)2013-03-11
