
直流微网实验中数字式光伏模拟器的研究与开发
2013-09-22 06:55卢志伟胡仁杰杨文燮
电气传动自动化 2013年2期
卢志伟,胡仁杰,杨文燮
(东南大学电气工程学院,江苏南京210096)
1 引言
能源枯竭和环境污染是目前全世界面临的重大问题,许多国家采取了提高能源利用率、改善能源结构、探索新能源和可再生能源等措施,以达到可持续发展的目的。可再生能源包括太阳能、风能、水能、地热能、生物质能等,其中太阳能和风能应用极其广泛,尤其我国幅员辽阔,东西和南北跨度都在5000km以上,拥有丰富的太阳能资源、风能资源,具有很好的开发前景,相信对于缓解当前能源与环境的压力具有重要意义。微电网,也被称为分布式能源孤岛系统,将发电机、负荷、储能装置及控制装置等系统地结合在一起,形成一个单一可控的单元,同时向用户供给电能和热能。将光伏等发电和蓄电池等储能装置通过DC/DC变换器与直流母线相连的系统,称之为直流微网。直流微网与交流微网相比较,发电设备与直流母线之间仅有一级电压变换装置,系统建设成本低,控制上容易实现,且不用考虑各发电设备之间的同步问题,在环流抑制上更具有优势。
在直流微网实验平台的研究中,如果以真实的太阳能电池和风机作为研究对象,系统的开发会受到自然环境的严重影响,首先太阳能电池板价格昂贵,且大功率光伏模块需要很大的占地面积,其次太阳能电池受太阳光照及温度影响,输出特性曲线会有很大变化,而这些影响完全是随机的,不可控因数的增多让整个系统的开发陷入困境,因此,提出了一个基于Buck斩波器以及DSP28335控制系统的数字式光伏阵列模拟器,利用Simulink中的模块和光伏模块SPG1786T-02E数据手册中提供的电气特性参数构建了光伏模块仿真模型[1],通过对光伏仿真模型的跟踪,设计了一个输出功率为500W左右的光伏模拟器,仿真验证表明,模拟器的输出特性非常接近光伏阵列的工程模型,并具有良好的动态响应。
2 光伏阵列输出仿真模型
太阳能电池的基本特性和二极管类似,当半导体材料吸收光能后,由光子激发出电子—空穴对经过分离就会产生电动势,其等效电路如图1所示。
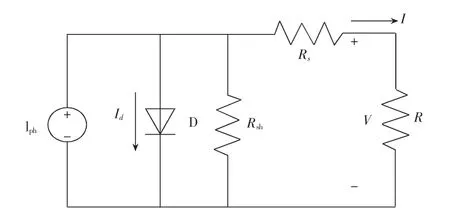
图1 太阳能电池的等效电路
提出了光伏模块的工程用数学模型,对大量太阳能电池进行实验[1],该模型可以保证与实际情况的误差小于 6%[2]。
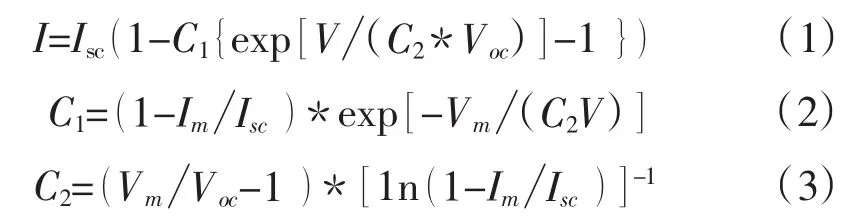
式中:Vm、Im分别为模块在最大功率点的电压和电流;Voc、Isc为模块的开路电压和短路电流。代入Isc、Voc、Im、Vm,就能得到标准测试条件(STC)下的光电流。根据这些已知条件可推算出在新的日照强度和新的电池温度下的I′sc、V′oc、I′m、V′m,公式如下:
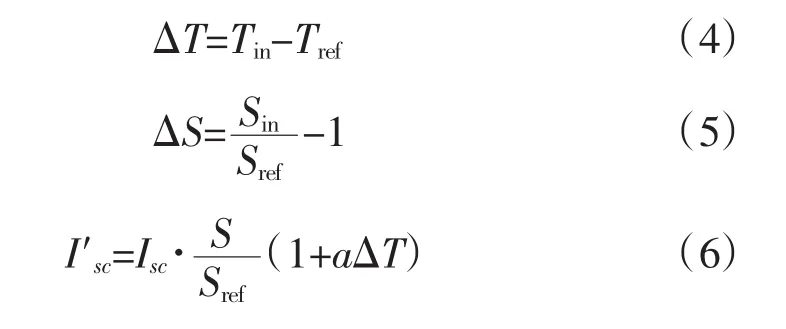
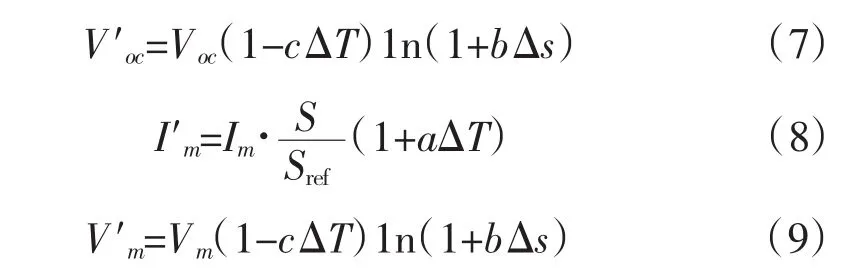
其中系数 a、b、c 的典型值分别为 0.0025/℃、0.5、0.00288/℃。
根据光伏模块SPG1786T-02E数据手册中提供的电气特性参数和以上模型构建了光伏模块仿真模型,光伏模块具体参数如下,Voc=49.8V,Isc=8.15A,Vm=23.8V,Im=7.15A。图 2(a)所示为当光伏电池温度为25℃,光照强度分别为1000、850、700、500W/m2时的 I-V 特性曲线,图 2(b)所示为当光照强度为1000W/m2,光伏电池温度分别为55℃、40℃、25℃、10℃时的 I-V 特性曲线。
由图2可知,光伏模块的输出特性与光照强度和电池温度有关。当温度不变时,随着光照强度的增大,光伏模块开路电压缓慢增大,短路电流迅速增大,最大功率也随之增大;当光照强度不变,随着电池结温的升高,光伏模块开路电压迅速减小,短路电流略有上升,变化不大,最大功率也随之减小。
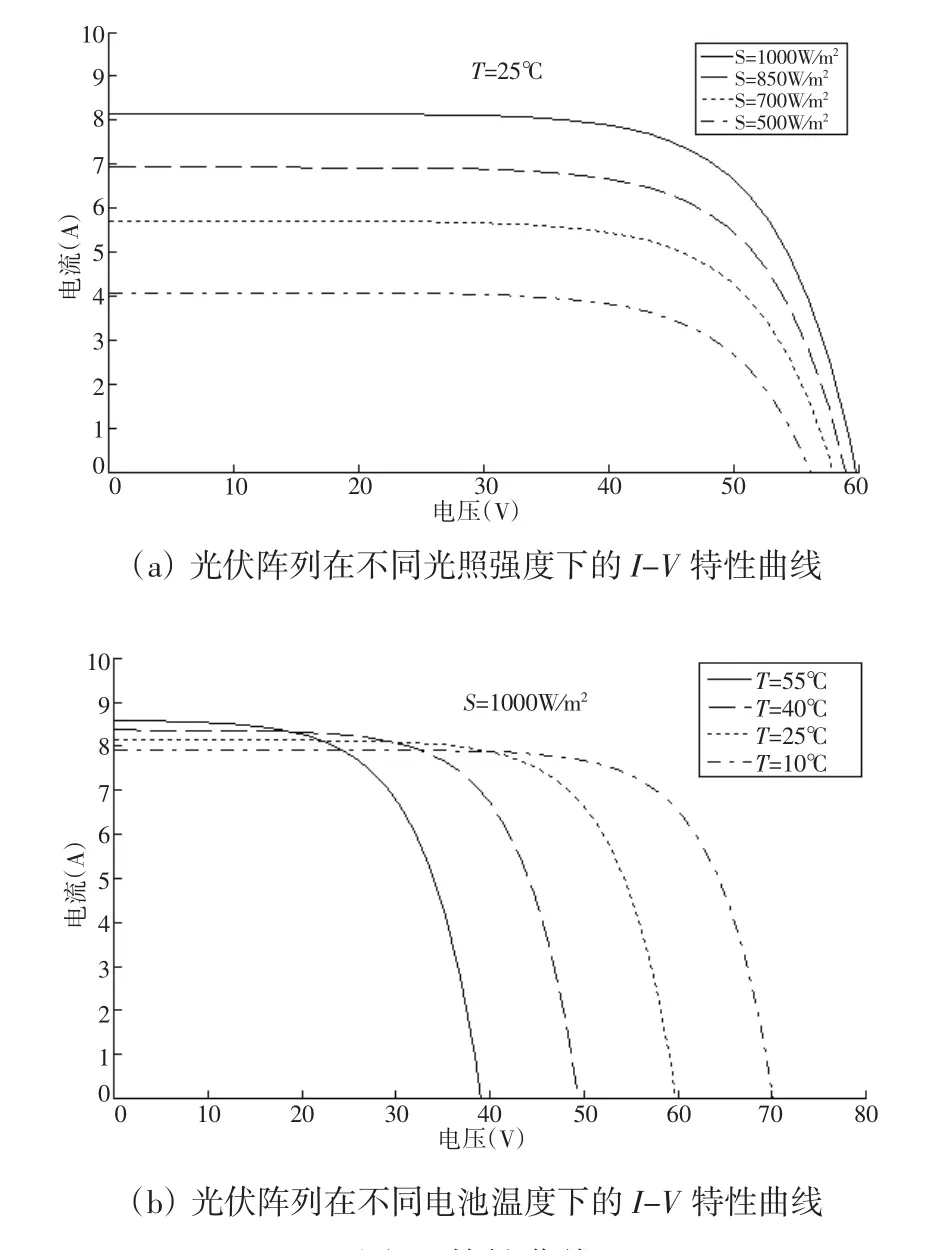
图2 特性曲线
3 光伏模拟器的设计及其跟踪策略
3.1 模拟器结构及硬件电路设计
图3所示为模拟器的设计原理图,将市电进行整流后输入Buck或半桥变换器(小功率开发时用Buck变换器,大功率用半桥变换器),由DSP28335检测负载输出电压电流,采用双闭环调节,根据光伏模拟器的数学物理模型输出,计算出PWM驱动波形,控制主电路中的MOS管的通断,从而实现对太阳能电池板输出特性的跟踪模拟。
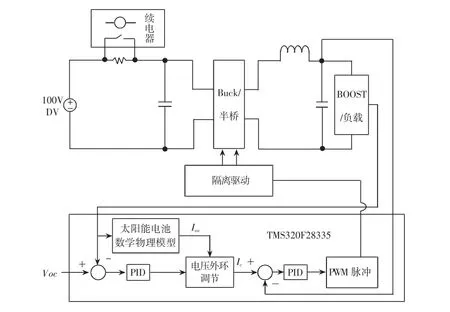
图3 数字式光伏模拟器结构图
本系统所选控制器为TMS320F28335,因其具有强大的数据处理能力,且内存优于TMS320F2812,更适合逐点差值法跟踪光伏曲线,具有精度高、速度快、集成度高等特点,适合控制领域。主电路输出及输入的电压和电流由电压电流传感器负责采集,采集后经过信号调理电路送入DSP,DSP则根据设定的算法对采集信号进行处理,输出PWM波形。PWM波形经过驱动电路控制MOSFET的开通或关断,实现符合光伏模块的输出特性的电压及电流输出,简单的讲,光伏模拟器就是特殊的开关电源,只不过其输出符合光伏特性而已。
系统硬件包括功率电路、检测电路及驱动电路。其中功率电路设计时,主要是滤波电容、输出电感的选择,滤波电容主要是考虑纹波的要求,本系统中电容的选择是结合工程经验,选用470μF,而电感的选择则是考虑到Buck电路的续流问题,按照最小电流保证电感电流临界连续的条件,导出电感值,当电感电路连续时,满足以下条件:
其中
当满足上述条件时,电感电流零界连续,电感值与输出电流和占空比有关,且D小于0.5时,电流基本不变D(1-D)单调增加,带入本系统各参数,计算得L≈0.1mH,本系统最大占空比为0.598,用D=0.59带入,计算得L≈1.3mH,考虑部分余量本系统选择L=0.1mH,很明显电路截止频率=134Hz~20kHz。同时,在主电路中加入了缓启动环节,防止对整个电路产生冲击。
检测电路主要就是电压电流传感器的选择,以及电压电流的调理和过保护设计,本系统采用托肯霍尔电流传感器TBC25D,电压传感器则采用TBV10/20X,由于输出均为交流,因此需对输出进行调理,且DSP输入应小于3.3V,调理电路加入限幅保护功能,中间加入一级绝对值电路,调理及保护电路分别如图4、5所示。隔离驱动电路中,选用HCPL-3120光耦隔离PWM驱动信号,MOS管用IRF460,MOS管并联MBR20200肖特基二极管,具体驱动电路如图6所示。
3.2 模拟器跟踪算法设计
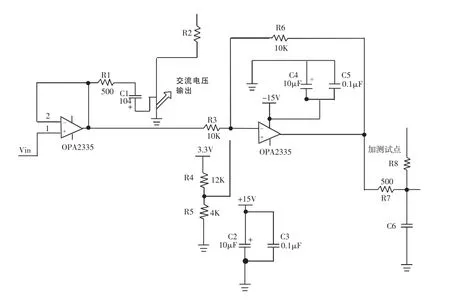
图4 电压采样调理电路
整个模拟器最核心的部分就是光伏阵列特性跟踪,即输出工作点的确定,而模拟器的工作点则是光伏输出特性和所带负载特性曲线的交点,不同的负载,伏安特性不同,与光伏阵列输出特性曲线的交点也不同,控制模块通过一定的算法,迅速找到这些工作点,并让整个系统稳定在该工作点上,且负载变化时,或光伏曲线变化时,模拟器应该能迅速找到新的工作点并稳定运行。实际情况中,光伏模拟器一般都接入DC-DC最大功率跟踪(MPPT)电路,因此能否迅速跟上后级MPPT电路是衡量光伏模拟器的一个重要指标。而本系统研究的是直流微网实验系统,该系统将光伏、风电模块发出的电量接入48V直流母线,直流母线上还接有蓄电池、超级电容等储能模块以及三相逆变模块,本系统中,光伏模拟器接入BOOST电路,BOOST电路具有最大功率跟踪功能,因此,设计的光伏模拟器在接入MPPT后应能稳定工作于最大功率点。
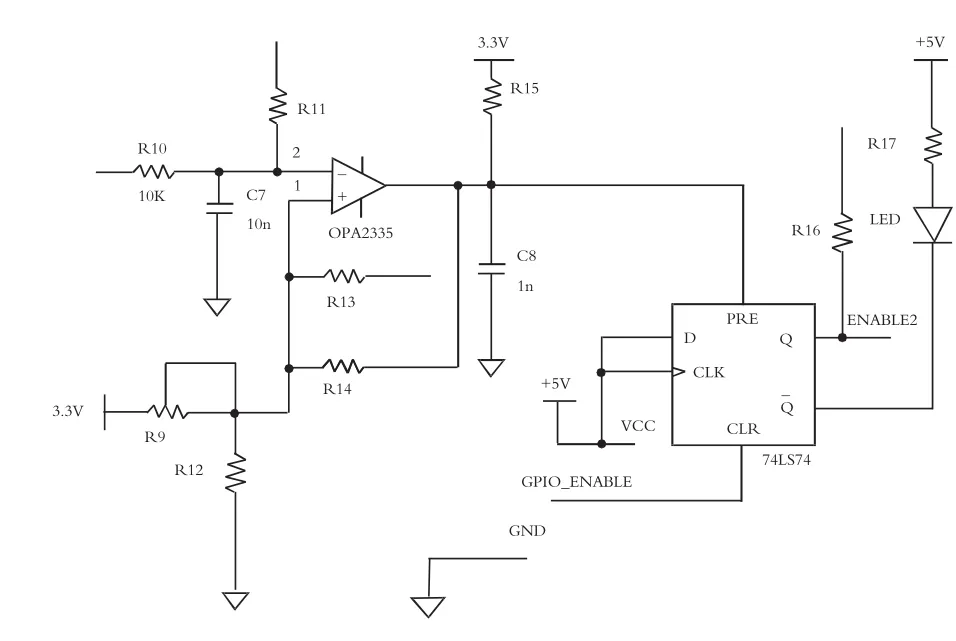
图5 直流过压保护电路
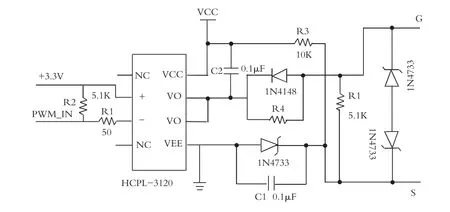
图6 PWM隔离驱动电路
而对于光伏特性曲线与负载特性曲线的交点的求法有很多种,目前主流的方法主要有两种。一是将光伏特性曲线用折线替代,因为光伏阵列的模型是一个复杂的函数,如果在控制器里编程则会涉及到多次对数运算,对于DSP等控制器来说完成对数运算难度太大,用多点折线法再配合最小二乘法拟合出4段或者5段甚至更多段曲线。这样,只要测得负载电阻,拟合曲线与负载特性曲线的交点将很容易得到,再利用闭环或者开环调节,就可以实现光伏曲线跟踪。另一种方法是将光伏特性曲线离散化,然后通过迭代法实现向光伏曲线的逼近,常见的迭代法有差值法、牛顿下山法等。当然,如果有强大的上位机支持,查表法不失为最准确的一种方法,且查表法的光伏数据可直接来自于光伏电池的测量,这样模拟器的工作将更为真实。但不同型号光伏电池参数的获得还是很困难的,除非是要求精度特别高的场合,否则一般不采用这种方法。本系统所选用的是逐点差值比较法,它也是一种迭代法,基本原理是以相同的迭代步长,相同的迭代函数依次进行迭代。首先,设定初始指令电流值 I0,一般取 I0=0.1Isc,I0与负载特性曲线交于P0点,此时负载的电压为U0,U0所对应的太阳能电池阵列特性曲线上的点为Q0点,则下一次的指令电流为I1=I0+λ(f(U0)-I0),其中,f(U0)为太阳能电池阵列的数学物理模型,λ是迭代步长,一般取0.1,指令电流I1与负载伏安特性交于P1,此时负载电压为U1,U1所对应光伏阵列伏安特性 Q1点,则下一次的指令电流为 I2=I1+λ(f(U1)-I1),依次迭代下去,指令电流为 I0、I1、I2……I*,负载工作点为 P0、P1、P2……P*,最终收敛在太阳能电池阵列的负载工作点,迭代步长越大,收敛越快,步长越小,稳定性和精度越高。具体负载工作点确立如图7所示。
本文先将光伏模块的工程数学模型折线化[3],根据曲线的特性,利用最小二乘法实现5段折线拟合给定I-V曲线,端点坐标分别取:(0,8.15)、(30,8.15)、(40.6,7.85)、(47.6,7.15)、(53,5.9)、(59.8,0)。
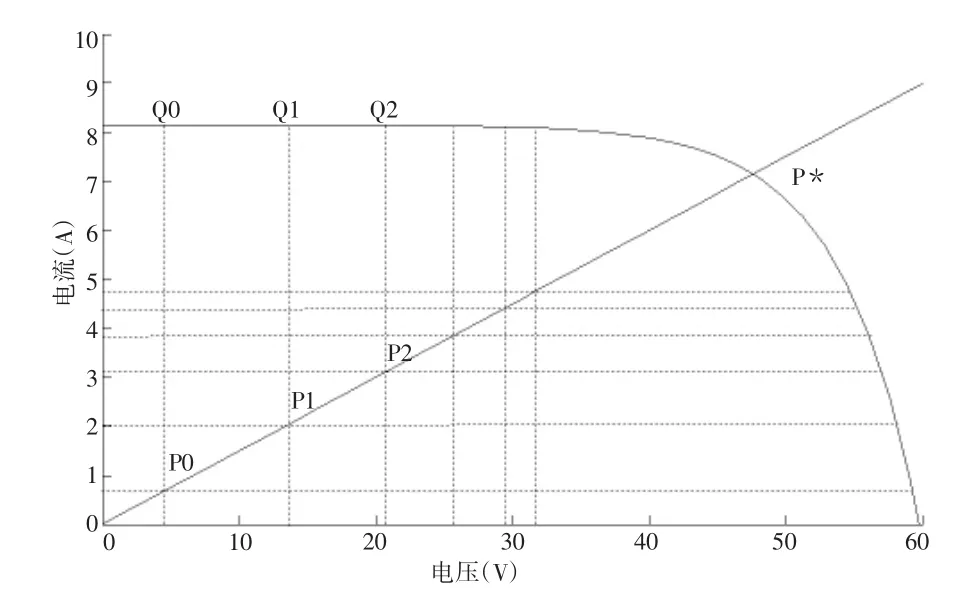
图7 光伏模拟器工作点跟踪示意图
如图8所示为光伏模拟器拟合曲线。由图8可知,拟合后的折线与模型曲线相差很小,可以满足模拟器的精度要求。经过拟合,原本复杂的函数变为一个分段线性函数,对拟合曲线与负载特性曲线的交点主要用以下三种方法:一是开环调节,即直接计算得拟合曲线与负载特性曲线的交点电压,将该电压除以BUCK输入电压,得到的值作为占空比控制MOS管的通断,该方法简单、迅速,但稳定性差,精度也不高,原因是输入电压一般都有波动,因此一般只是在调电路初期使用;二是直接计算得拟合曲线与负载特性曲线的交点电压,但是控制上采用闭环控制,就是将指令电压与实际输出电压的差值通过PI调节后,产生PWM控制MOS管,使得输出跟随指令电压,只要电压符合,由于阻性负载的特性,电流也必然符合光伏特性输出;三是基于差值迭代法的双闭环指令电压电流分段调控,在短路电流点附近,光伏输出接近恒流,因此适合进行电流跟踪,在开路电压点附近,电压的变化量较小,适合于电压跟踪,同时当内环为电流指令调节时,外环则采用电压调节,为了保证系统的外环快速性,外环还采用积分分离调节,模拟器的具体控制流程如图9所示。
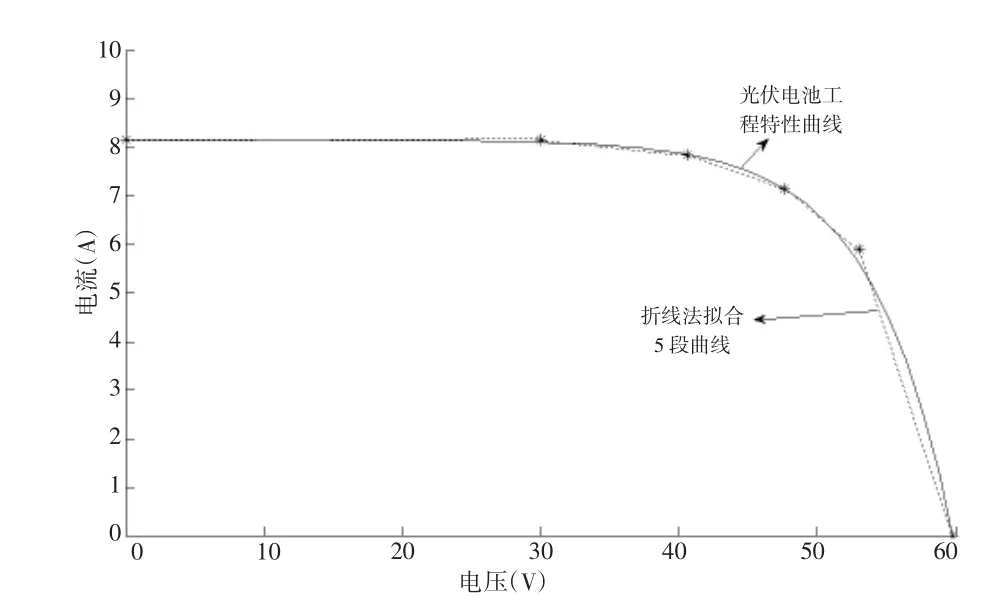
图8 光伏模拟器拟合曲线
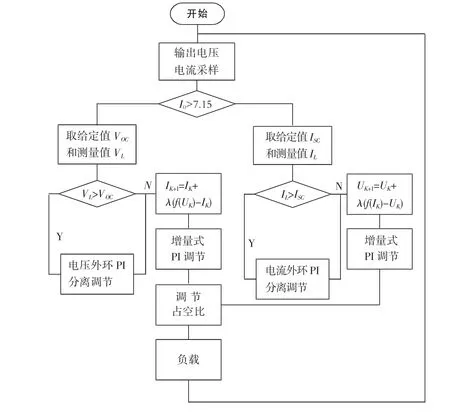
图9 光伏模拟器控制流程图
4 实验结果及误差分析
根据上述主电路以及控制方案,其中Buck电路 中 电 感 L =3mH,C1=470μF,C2=22μF/470μF,MOS管的开关频率为20kHz。仿真运行了开环、闭环以及迭代法双闭环等条件下的变电阻跟踪模拟,同时进行了MPPT接入后的仿真试验,并绘制了输出的拟合曲线,在开环条件下,负载由10Ω经过 0.01s跃变为 6.657Ω(最大功率点电阻)。研究发现,该控制控制简单,跟踪速度快,但是系统稳定效果差,且受到输入波动的影响,系统精度不是很高。在闭环条件下,负载由10Ω经过0.01s跃变为6.657Ω,研究发现,与开环相比,稳定性得到一定的提高,跟踪速度稍慢于开环系统,系统精度与开环相比也得到一定的改善。
最后仿真研究了该项目所采用的迭代法双闭环跟踪策略,具体输出波形如图10所示,由图10可见,系统的响应速度、精度、稳定性都是最佳的,由此可知,负载跃变后,系统的动态响应时间约为0.002s左右,系统初始 R=10Ω 条件下 0.005s达到稳定,在 t=0.008s,R 突变为 6.657Ω,模拟器稳定跟踪在工作点(47.6V,7.15A)。
根据以上模型,改变负载电阻,得到光伏模拟器的多个工作点,绘制出光伏模拟器的真实输出特性曲线,如图11所示。
5 结论
该文根据光伏模块的数学物理模型的输出特性,采用基于DSP28335控制的Buck斩波电路实现光伏特性的输出,给出了主电路及检测保护电路的设计,分析并研究了光伏跟踪的几种算法,最后采用迭代法双闭环跟踪策略实现光伏模拟器的实时跟踪。实验证明,该模拟器电压和电流稳定值与模型的误差完全满足本实验系统的运行需要。
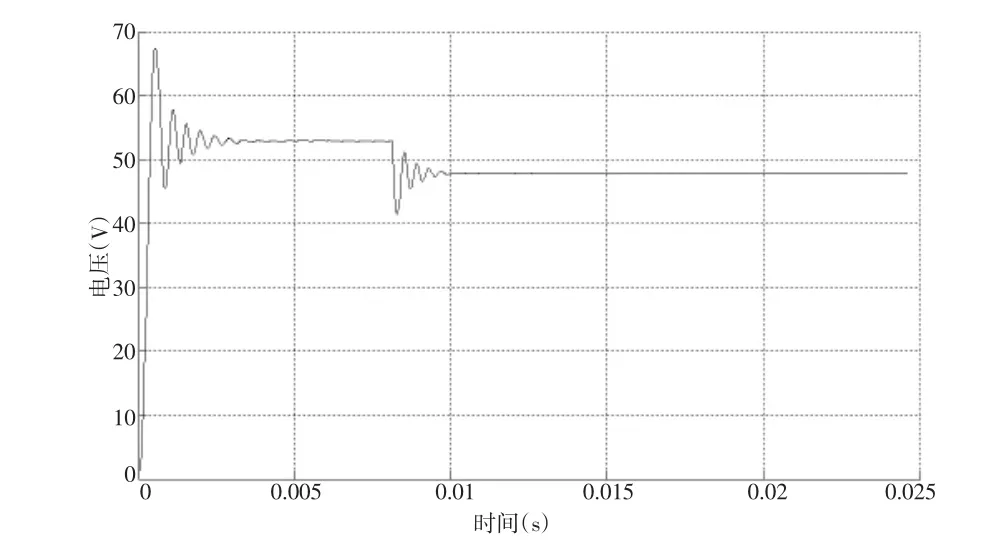
图10 光伏模拟器跟踪波形
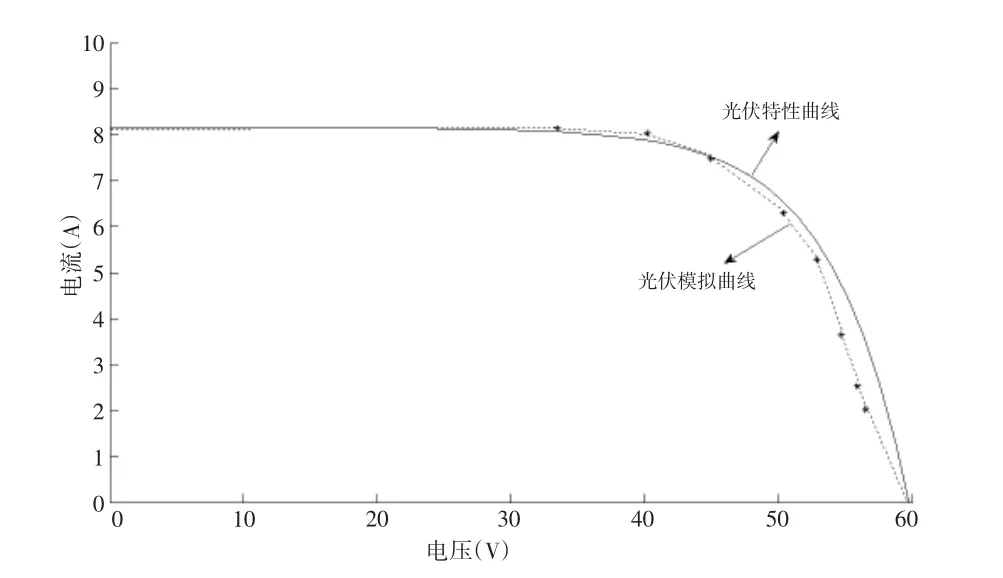
图11 光伏模拟器输出特性曲线
[1] WangNianCHun,XuQingSHan.Model of SPG1786T-02E Photovoltaic Module in Matlab simulink[J] .IEEE Transaction on Energy Conversion,2007.22(2):439-449.
[2] 苏建徽,余世杰,赵 为,吴敏达,沈玉梁,何 慧.硅太阳电池工程用数学模型[J] .太阳能学报,2001,22(4):409-411.
[3] 张熙霖.基于DSP2407的光伏方阵仿真电源的设计与研究[D] .北京:中国科学院电工研究所,2004.
[4] H S Rauschenbach.Solar Cell Array Design Handbook,Litton EducationalPublishing Inc,1980.
[5] 汉斯.S.劳申巴赫,太阳电池阵列设计手册.宇航出版社,1987.
[6] 沈玉梁,跟随样品太阳电池的光伏阵列模拟器[J] .太阳能学报,1997(10):448-451.
[7] 宋平岗.再生能源系统中太阳能电池仿真器的研究[J] .电力电子技术,2003,37(4):42-45.
[8] 韩朋乐.数字式光伏电池阵列模拟器的研究与设计[D] .电子科技大学,2009.
[9] 刘万明.数字式太阳能电池阵列模拟器的研究[D] .电子科技大学,2009.
猜你喜欢
科学大众(2022年23期)2023-01-30
小哥白尼(趣味科学)(2021年6期)2021-11-02
现代畜牧科技(2021年4期)2021-07-21
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
流行色(2020年9期)2020-07-16
家庭影院技术(2018年9期)2018-11-02
小哥白尼(趣味科学)(2018年4期)2018-06-21
CHIP新电脑(2017年6期)2017-06-19
少儿科学周刊·儿童版(2015年7期)2015-11-24
