基于受流轨特性的磁浮列车定位方法研究*
2013-09-25 07:24刘国清张昆仑靖永志
城市轨道交通研究 2013年9期
刘国清 张昆仑 靖永志
(磁浮技术与磁浮列车教育部重点实验室,610031,成都∥第一作者,助理研究员)
磁浮列车定位系统能够为列车自动防护(ATP)子系统、自动运行(ATO)子系统、自动监控(ATS)子系统提供准确的位置信息。其定位方法的精度和可靠性是确定列车安全防护距离的重要因素,对轨道交通系统的效率、闭塞控制的方式、列车运行控制系统的兼容性和生命周期费用等都具有重要的影响[1]。因此,深入研究列车定位方法,对于推动列车运行控制系统的研究和轨道交通系统的发展具有重要的意义。目前,应用于列车定位系统的技术有多种,如光电感应定位测速、微波定位测速、接近传感器定位测速、交叉感应回线定位测速、GPS(全球定位系统)定位技术等[2-5]。在这些检测方式中,有的地面设备需要带电工作,易受到外界环境的影响,且增加了维护成本;有的检测物体的位置具有间断性,是非连续性的检测方式;有的结构复杂,可靠性差;有的设备昂贵,成本高。
本文通过研究磁浮列车供电系统中受流轨的特性,提出并分析了一种新型的用于磁浮列车的定位方法[7],阐述了该定位方法的原理以及派生出的3种拓扑结构,并利用现有10m磁浮模型车系统对基于该方法实现的定位装置进行了试验验证。试验表明:该定位方法简单易行,可以避免在线路沿线铺设大量的测量装置;其测量系统完全具备室内放置的条件,成本低廉、可靠性高、易于维护,且位置测量值具有连续性。
1 磁浮列车受流轨
受流轨供电也称第三轨供电。其概念由德国西门子公司于1879年提出,并迅速得到了发展。目前,轨道交通例如地铁、轻轨、有轨电车和磁浮列车等均采用了受流轨技术[7]。磁浮列车通常采用侧向受流方式和DC 1 500V供电制,其受流装置通常安装在悬浮架底部,接入±DC 1 500V两条受流轨分别安装在线路基础的两侧,磁浮车受流靴在弹簧力作用下,通过与受流轨机械滑动接触,实现列车供电(如图1所示)。
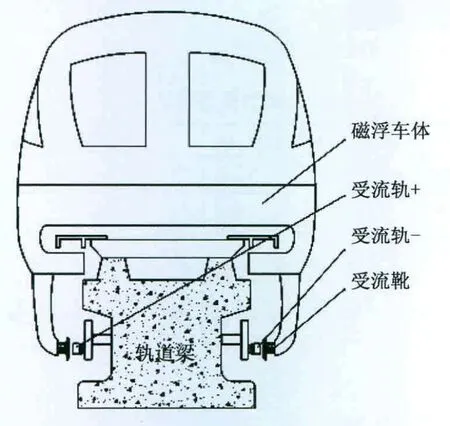
图1 磁浮列车受流示意图
2 基于受流轨特性的列车定位原理
受流轨采用铝合金和不锈钢材料经复合加工而成。其特点是截面单一,材质分布均匀。常规的磁浮列车由线路两端的两个变电站供电[9]。现将磁浮列车当作负载RT,忽略各段受流轨间的接触电阻。设线路总长为L,列车所处位置距线路两端的距离分别为L1和L2,受流轨材料的电阻率为ρ,受流轨截面积为A,利用电压、电流测量装置,可以获得受流轨两端的电压U1和U2,以及流过受流轨的电流i1和i2,如图2所示。

图2 基于受流轨特性的列车定位方法原理图
确定了L1或L2的值,便可实现对列车的定位。图2所示的列车定位方法的数学模型可表示为:


其中,RL1、RL2分别是长度为L1和L2的受流轨对应的电阻值,由受流轨的材料和截面积决定,其表达式为:
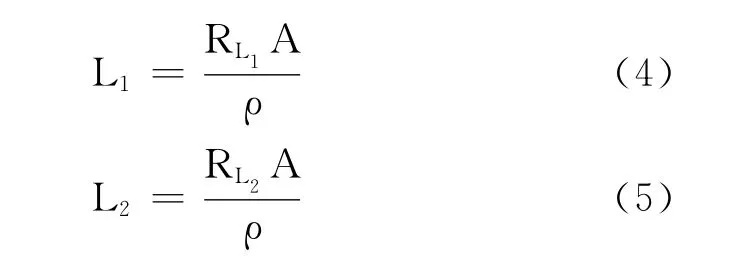
由于磁浮列车在悬浮过程中其悬浮电流是不断变化的,对应的负载RT也不是一个常量。所以,需在列车上布置一电压测量装置实时检测列车两侧受流靴之间的电压值UF,并通过无线通信的方式送入定位系统。该电压值与列车负载的关系为:

利用电压、电流测量装置获得的值,可计算出列车所处位置对应的受流轨的电阻值,进而确定列车的位置。由式(1)、(2)和(3)可以看出,利用一种或数种电压、电流测量装置的搭配,即可实现对列车的定位。
在获得列车的位置信息后,只需将该位置数据实时地送入数据处理器件,如单片机、DSP(数字信号处理器)、FPGA(现场可编程逻辑门阵列)、PC机、工控机等。利用速度-位移公式即可得出列车的运行速度。

式中:
v——列车运行速度;
ΔT——采样的时间间隔;
ΔL——采样时间间隔内的位置变化量。
基于受流轨特性的列车定位系统的结构框图如图3所示。

图3 列车定位系统结构框图
3 不同拓扑结构的测速定位方法
3.1 双端测量法
由式(1)和(2)相减可以消去列车负载,得到:

由式(8)和式(3)可以确定列车位置。其定位方法的拓扑结构如图4所示。
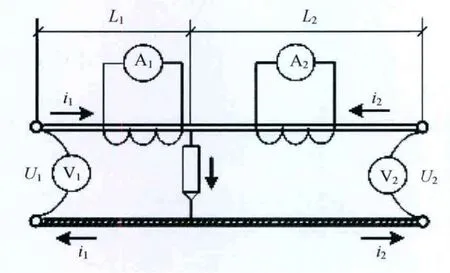
图4 双端测量法拓扑图
采用这种方法可以将电压、电流测量装置放置于室内,沿线路铺设一条专门的通信线缆,或利用无线传输的方式将测量数据送入数据处理装置。
3.2 单端测量法
利用式(1)和(3)可以实现列车定位。其定位方法的拓扑结构如图5所示。
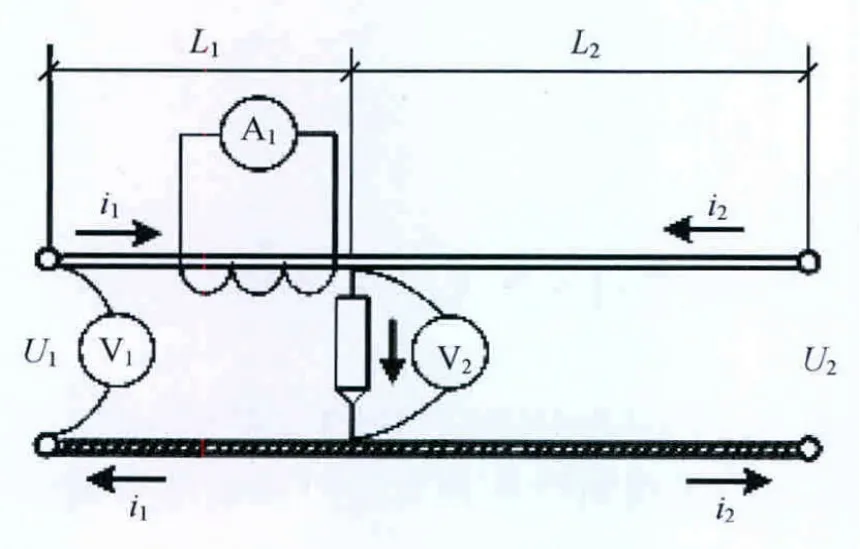
图5 单端测量法拓扑图
采用这种方法可以将一组电压、电流测量装置放置于室内,将另一电压测量装置布置在列车上,必须利用无线通信的方式将测量值送入数据处理装置。
利用式(2)和(3)也可以实现列车定位,与上述双端测量法、单端测量法唯一的区别只是测量装置放置地点的不同。
4 在10m长磁浮线上模型车的试验验证
4.1 列车定位装置的实现
利用现有10m长磁浮线上模型车系统,对基于该原理的列车定位装置进行试验验证。该模型车受流轨的参数如表1所示。

表1 模型车受流轨参数
由于工作电流不大(DC 48V,20A),该磁浮模型车没有设专门的变电站供电,而是采用1 000W的开关电源。电源接入受流轨的方式是两端接入,如图6所示。
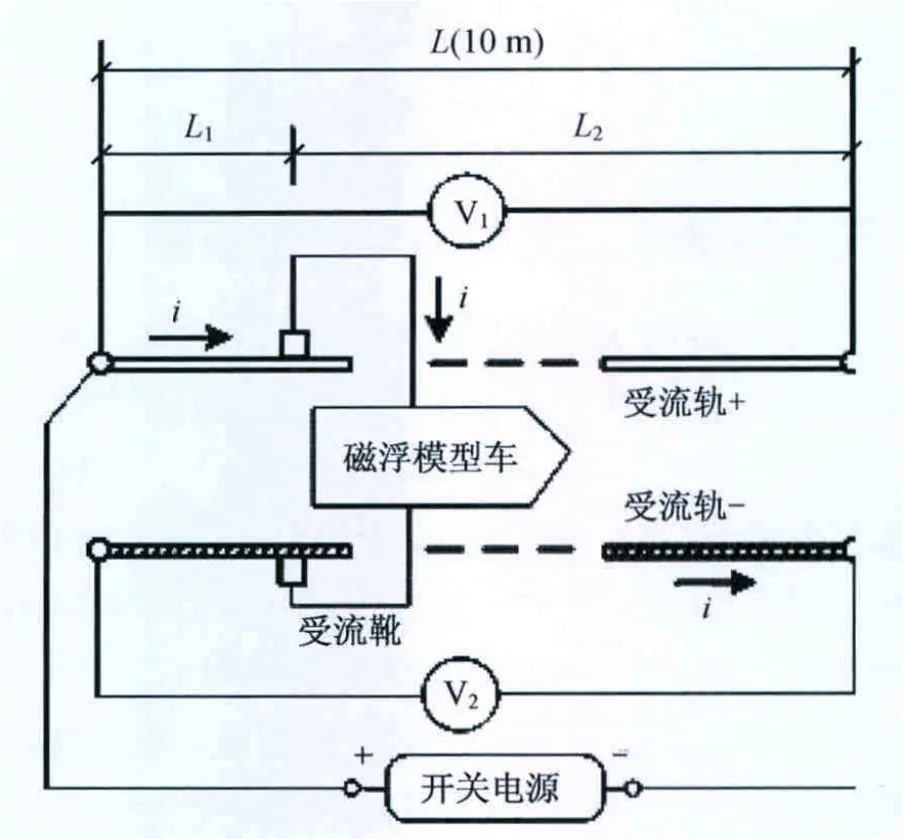
图6 10m长磁浮线上模型车定位装置原理图
开关电源的正负极分别接在两侧受流轨的两端,利用先前建立数学模型的方法可以得出:

从式(9)可得出:对于磁浮模型车系统来说,只需要测量其两侧受流轨端部的电压值便可确定列车位置。采用两通道以上12位的A/D(模/数)采样芯片(MAX1312)采集电压值,并利用 DSP(TMS320F2812)进行数据处理,制备出一套定位装置。
4.2 试验方法和结果
在模型车轨道上每隔0.5m设立一位置标志,将磁浮模型车浮起后,手动推动模型车前进,将其准确停靠在每个标志位,并利用定位装置对处于每个位置标志的模型车进行位置测量,最后将定位装置得到的位置信息和位置标志进行比对。试验结果如表2所示。

表2 定位试验结果
由表2可以得出,磁浮模型车在10m长轨道上运行时,利用该定位装置可以较精确地测量出列车的位置。
5 结语
利用受流轨的电阻率特性和材料的一致性,可以得到一种新的用于磁浮列车的定位方法,利用该方法实现的测量装置可放置在室内,并具有成本低廉、易于维护的特点。利用该方法可以得到几种不同拓扑结构的定位模型。这几种模型各有自己的优缺点,可根据实际的需要选择定位模型。
利用该方法实现的定位装置,其模型试验的测量精度小于5%。如果需要更高的定位测量精度,则需要对受流轨的材料和截面形状的一致性提出更高的精度要求,并需采用更高精度的电压和电流测量装置。通过在磁浮模型车系统上的试验表明,该定位方式是可行的。
本文提出的方法用在具有整段受流轨的线路上较为合适,而在实际的轨道交通线路中,由于受流轨间存在接缝,会引出接触电阻的问题,目前正利用查表法尝试解决这一问题。目前的难点在于如何实现较高的位置测量精度。但无论如何,该方法还是具备一定的应用价值,可作为现有磁浮列车定位技术的一种补充。
[1]张湘,连级三,张昆仑.磁浮列车机械制动系统的自适应控制研究[J].铁道学报,2002,24(3):18.
[2]郭小舟,王滢,王式雄.高速磁悬浮列车定位测速系统[J].西南交通大学学报:自然科学版,2004,39(4):455.
[3]龙志强,李晓龙,周文武,等.磁悬浮列车的定位和测速技术研究[J].国防科技大学学报,2003,25(4):83.
[4]杨建勇,连级三.基于轨间电缆的磁悬浮列车定位测速[J].机车电传动,2001(1):30.
[5]戴春辉,薛松,龙志强.基于长定子齿槽的磁浮列车测速定位传感器信号处理[J].传感技术学报,2009,22(6):823.
[6]刘国清.一种受流装置的定位方法:中国,200910222254.7[P].2011-06-15.
[7]胡基士,潘慧龙.磁浮列车受流器设计依据分析[J].西南交通大学学报:自然科学版,2000,35(2):171.
[8]吴祥明.磁浮列车[M].上海:上海科学技术出版社,2003:192.
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
小学生学习指导(低年级)(2019年6期)2019-07-22
知识经济·中国直销(2018年3期)2018-04-12
浙江工业大学学报(2017年5期)2018-01-22
北京航空航天大学学报(2016年5期)2016-11-16
测绘科学与工程(2016年4期)2016-04-17
中国房地产业(2016年9期)2016-03-01