一个简化的混沌系统及其控制器设计
2013-10-15 07:38吴凤娇张建伟
计算机与现代化 2013年11期
吴凤娇,张建伟,王 雷
(西北农林科技大学水利与建筑工程学院,陕西 杨凌 712100)
0 引言
世界的本质是非线性的,非线性是产生混沌的必要条件。自从1963年Lorenz[1]第一次在三维系统中发现混沌吸引子以来,混沌引起了人们的广泛关注。人们发现并提出了很多新的混沌系统,具有代表性的包括1999年陈关荣等[2]发现存在混沌吸引子的Chen系统,2002年吕金虎等[3]发现的Lü系统和2004年刘崇新等[4]进一步提出的Liu系统。随着计算机科学的不断发展,人们对系统的混沌认识逐渐加深。
近年来,相关学者构造了很多新的四维混沌系统[5-7],但对只含有一个立方项的四维混沌系统的研究不多,对其控制进行的文献就更少。人们对于如何控制混沌开展了大量的研究,并已经设计出许多控制方法,包括线性反馈控制方法、模糊控制方法、滑模控制方法以及主动控制方法等[8-13]。本文首先在磁弹体混沌系统的基础上,构造一个新的四维混沌系统,并对其混沌特性进行动力学分析,证实该系统混沌的存在性。并提出一种新的滑模控制方法用于该系统的控制,通过Matlab数值仿真验证所设计的控制器的有效性。
1 混沌系统的提出及分析
1.1 系统的混沌数学模型
混沌是非线性动力系统所特有的行为,而含有非线性项是非线性动力系统的必要条件,故非线性项对系统能否出现混沌具有重要作用。磁弹体系统[14]的混沌模型为:

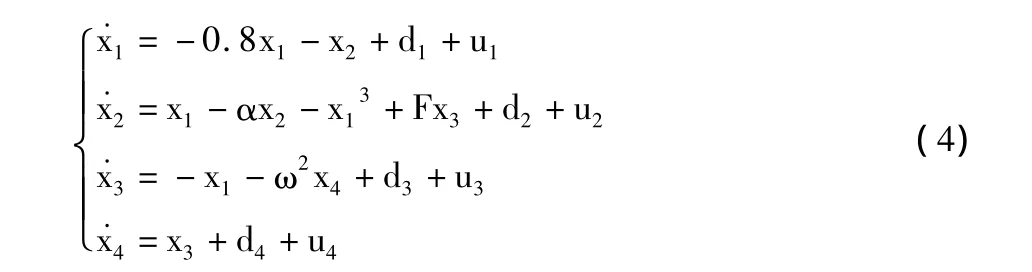
本文在公式(1)磁弹体系统的基础上,通过引入部分线性项,构造只含有一个立方项的新四维动力系统为:
其中,α、F、ω 均是大于零的常数,d1、d2、d3、d4为外界扰动,它们都是有界的,即|di|≤δ,δ为常数。为不失一般性,此处取随机扰动 d1=0.2;d2=0.3*sin(t);d3=0.4*cos(t);d4=0.4。当 α =0.3,F=0.365,ω =1.2时,系统的三维相轨迹曲线如图1所示。
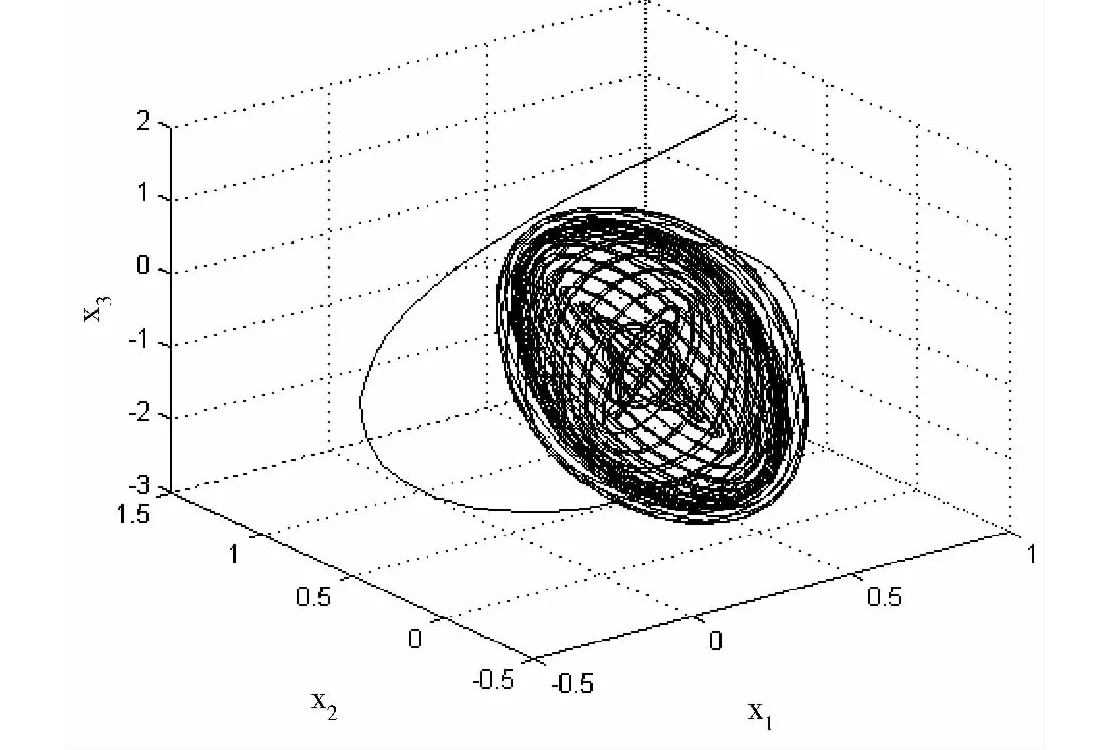
图1 公式(2)系统的x1-x2-x3相轨迹运动曲线
1.2 系统的混沌特性分析
1.2.1 耗散性分析
对系统进行耗散性分析有助于更好地发现系统的混沌特性,对式(2)做梯度运算可以得到:

经过上述分析计算可以看出,公式(2)系统的梯度小于零,即系统具有耗散性结构,随着时间的推移,系统的运动轨迹最终将会趋于一个体积为零的极限吸引子上,收敛的速度是以指数-0.8-α的形式收敛到零。
1.2.2 Poincaré截面分析
利用Poincaré截面可以更好地认识系统的混沌特性,是一种经典的混沌系统分析技术。可以通过观测庞加莱截面上点的分布对系统进行定性分析,做出公式(2)系统在x1-x4平面点的分布情况如图2所示,在图2中点的分布是成片分形密集的,说明系统存在混沌行为。
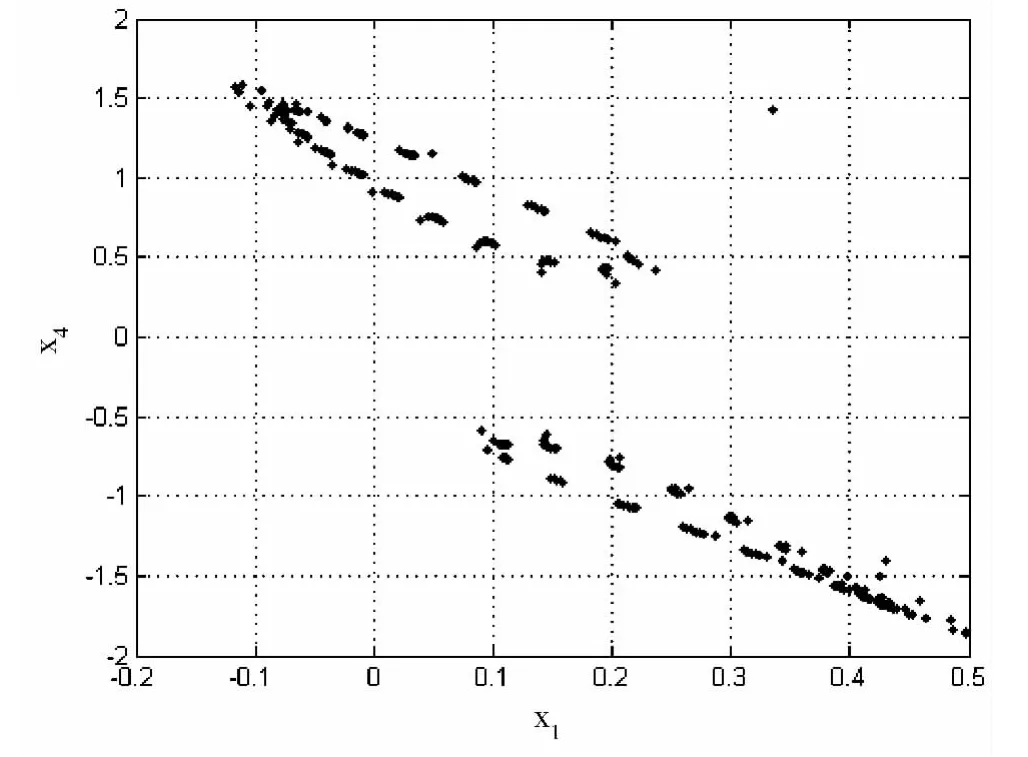
图2 公式(2)系统的庞加莱截面
1.2.3 Lyapunov 指数
李雅普诺夫是一种非常经典的非线性动力学系统分析技术,通过观察李雅普诺夫随系统参数变化的动态规律,可以非常方便地对系统是否存在混沌做出判断。当系统的李雅普诺夫指数有一个大于零时,称其为混沌系统;当系统存在2个李雅普诺夫指数大于零时,称其为超混沌系统。当 α =0.3,F=0.365,ω =1.2时,做出公式(2)系统的李雅普诺夫指数随参数F的变化规律如图3所示,可以从图3中明显地看出,系统有一个Lyapunov指数大于零,因此公式(2)系统存在混沌特性。
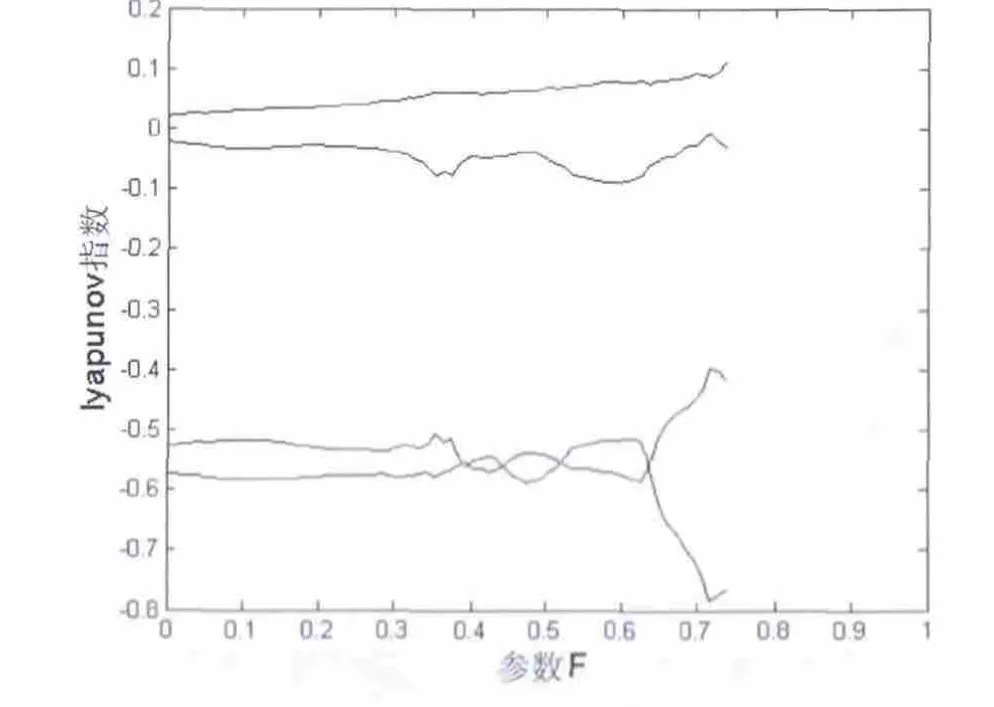
图3 公式(2)系统的Lyapunov指数谱
2 系统混沌模型的滑模变结构控制
2.1 系统的受控模型
公式(2)系统在控制器作用下的受控模型为:
式(4)中 u1、u2、u3、u4为待设计的控制器,定义如下矩阵:
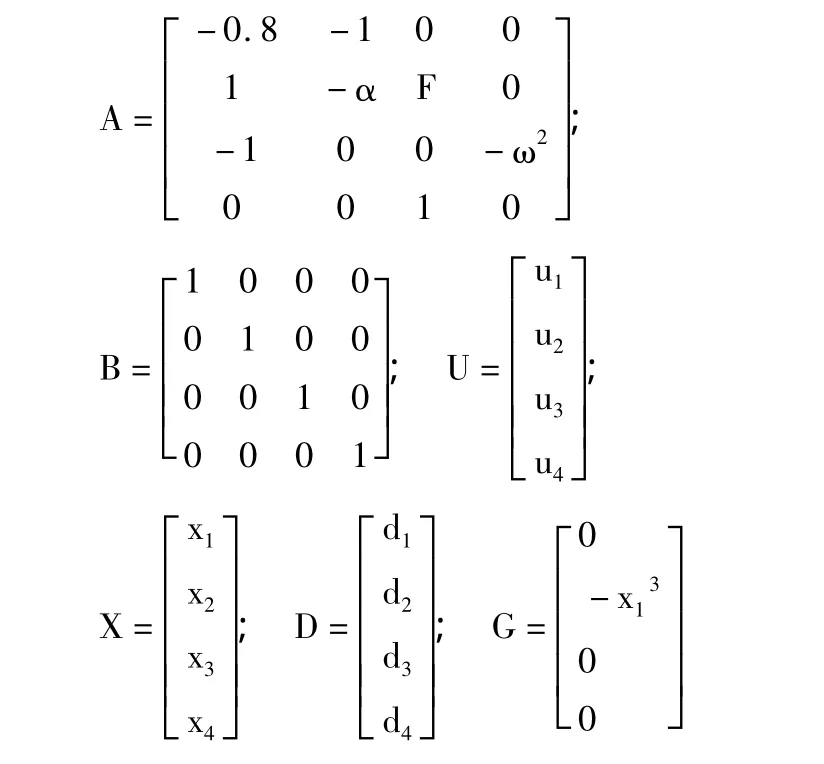
其中,A为系统的线性矩阵,B为系统的控制矩阵,U为控制向量,X为状态向量,D为外界扰动向量,G为系统的非线性向量。
在控制器输入为0时,系统的状态轨迹曲线以x1为例如图4所示,可以看出,公式(2)系统在未加控制器时,其运动轨迹是非周期的随机运动。因此设计目标就是在加入控制器后,能够将公式(2)系统控制到指定的固定点或周期轨道。
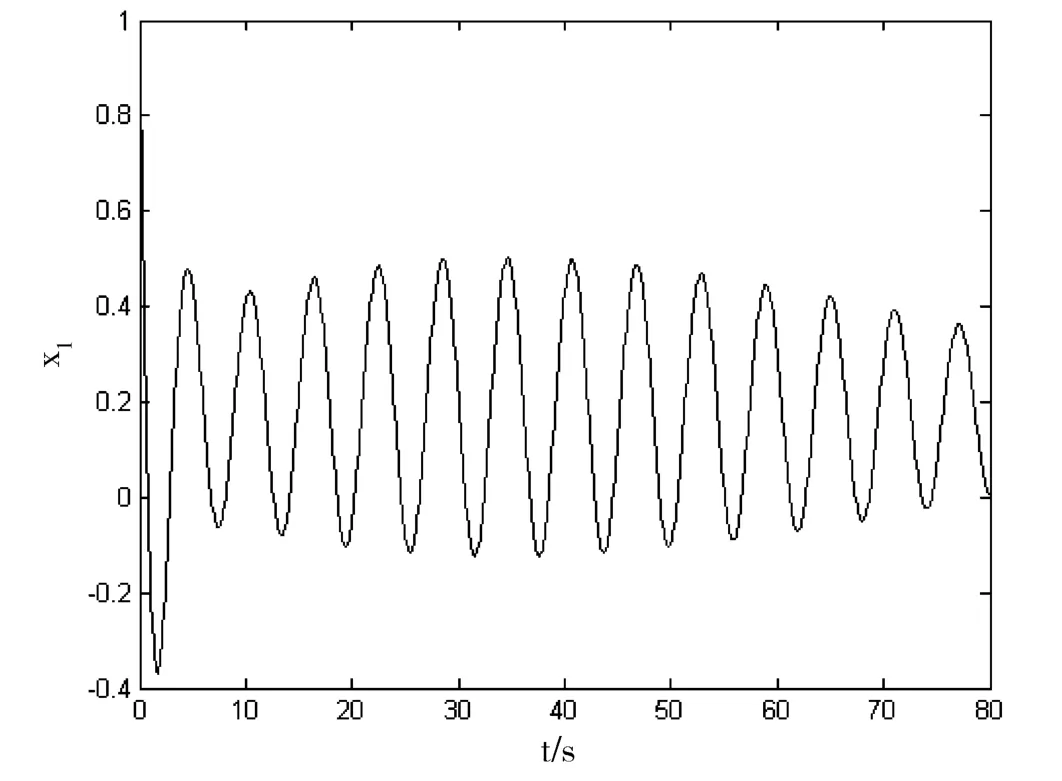
图4 受控前公式(2)系统状态变量的时域图
2.2 控制器的设计
滑模控制器的设计分为2步:(1)等价控制器的设计,通过构造滑模面使系统达到期望的轨道;(2)不连续的趋近率的设计,保证系统在滑模面外的运动都能在有限的时间内达到滑模面上,保证系统的鲁棒性。
控制的目标是使系统的状态X=[x1x2x3x4]T跟踪期望的状态 Xd=[xd1xd2xd3xd4]T,因此,定义系统的跟踪误差:

其中,E= [e1e2e3e4]T为系统的跟踪误差向量。可以得出误差动力系统为:

设计滑模面S=S(E,t):
其中,需要满足条件 det(KB)≠0,此处取 K=diag(1,1,1,1),并且满足 A-BL 为负定矩阵。
总的滑模控制器设计为:

其中,ueq是等效控制器,ud为不连续的趋近律。
在滑模状态下,必须满足:

在不考虑外界扰动时,由式(6)、式(7)和式(9)可得:
因此由式(10)可以得到等效控制器:

为了保证系统在滑模面上运动的鲁棒性,设计不连续的趋近律:

将式(11)和式(12)代入式(8)可得,系统总的控制器设计为:

其中,sign( x)是 x的符号函数,当 x>0,sign( x)=1;当 x=0,sign( x)=0;当 x<0,sign( x)=-1。
命题 若ε为常数,且满足ε>δ,则前述设计的式(13)控制器可将公式(2)系统从混沌态控制至稳定运行状态。
证明 李雅普诺夫函数选择为:
从式(7)和式(13)可以得到:

证毕。
从上面的证明可以看出,设计的式(13)控制器具有很好的鲁棒性,具有对外界干扰不敏感的优点。
2.3 数值模拟
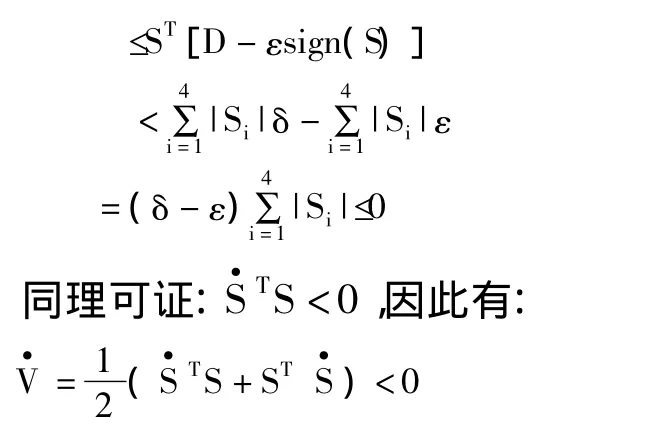
为将公式(2)系统从混沌态控制到期望的目标,取矩阵 A-BL的特征根为 P=[-5,-4.99,-5,-5.01],故可确定矩阵:
根据式(7)可确定滑模面如下:
系统的初值取为[x(0),y(0),z(0),u(0)]=[1,1,1,1],期望目标 xd1=xd2=xd3=xd4=xd。可以得到控制器为:
2.3.1 控制到固定点
在这里取参考状态xd=0.3为例,在刚开始不加入控制器,等系统运行至t=10s时加入控制器,采用Matlab数值模拟绘制系统的状态变量和滑模面的运动轨迹分别如图5和图6所示,此时对应的参数取值为 α =0.3,F=0.365,ω =1.2,ε =7。
通过观察图5和图6系统的状态变量以及滑模面时域图可知,系统在加入控制器后在很短的时间内最终被控制至参考状态xd=0.3,证明所设计控制器的有效性。
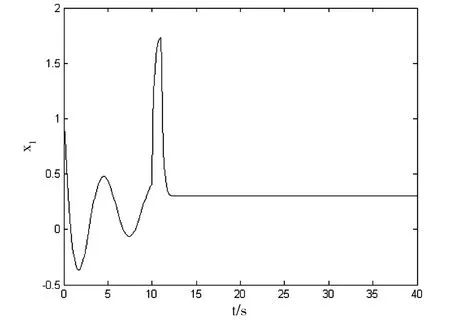
图5 受控后公式(2)系统状态变量的时域图(xd=0.3)
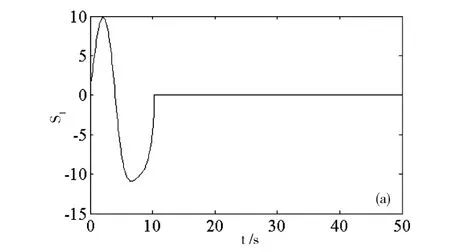
图6 受控后公式(2)系统滑模面的时域图
2.3.2 控制到周期轨道
在这里取参考状态xd=0.5sin(0.5t)为例,在刚开始不加入控制器,等系统运行至t=10s时加入控制器,采用Matlab数值模拟绘制系统的状态变量的运动轨迹如图7所示。
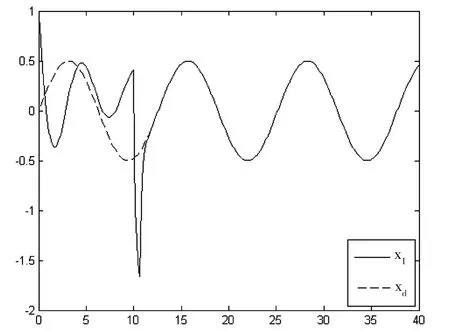
图7 受控后公式(2)系统状态变量的时域图(xd=0.5sin(0.5t)
通过观察图7系统的状态变量时域图可知,系统在加入控制器后在很短的时间内最终被控制至参考状态 xd=0.5sin(0.5t),证明所设计控制器的有效性。
3 结束语
本文构造了一种只含一个立方项的非线性系统,通过对其相图、耗散性、Lyapunov指数等动力学特性进行分析,证实了该系统的混沌存在性。并设计了一种新的滑模控制方法对其混沌运行轨迹进行控制,分别将其控制到期望的固定点和周期轨道,理论分析和Matlab数值仿真结果完全一致,证实了设计的控制器的合理性和有效性。
[1]Lorenz E N.Deterministic nonperiodic flow[J].Journal of the Atmospheric Sciences,1963,20(2):130-148.
[2]Chen G R,Ueta T.Yet another chaotic attractor[J].International Journal of Bifurcation and Chaos,1999,9(7):1465-1466.
[3]Lu J H,Chen G R.A new chaotic attractor coined[J].International Journal of Bifurcation and Chaos,2002,12(3):659-661.
[4]Liu C X,Liu L,Liu T,et al.A new butterfly-shaped attractor of Lorenz-like system[J].Chaos,Solitons and Fractals,2006,28(5):1196-1203.
[5]张宇辉,齐国元,刘文良,等.一个新的四维混沌系统理论分析与电路实现[J].物理学报,2006,55(7):3307-3313.
[6]Chen Y,Yang Y Q.A new four-dimensional chaotic system[J].Chinese Physics B,2010,19(12):120510.
[7]王发强,刘崇新,逯俊杰.四维系统中多涡卷混沌吸引子的仿真研究[J].物理学报,2006,55(7):3289-3306.
[8]Aline S P,Marcelo A S.A multiparameter chaos control method based on OGY approach[J].Chaos,Solitons &Fractals,2009,40(3):1376-1390.
[9]Sadeghpour M,Khodabakhsh M,Salarieh H.Intelligent control of chaos using linear feedback controller and neural network identifier[J].Communications in Nonlinear Science and Numerical Simulation,2012,17(12):4731-4739.
[10]王校锋,薛红军,司守奎,等.基于粒子群算法和OGY方法的混沌系统混合控制[J].物理学报,2009,58(6):3729-3733.
[11]Wang C C,Pai N S,Yau H T.Chaos control in AFM system using sliding mode control by backstepping design[J].Communications in Nonlinear Science and Numerical Simulation,2010,15(3):741-751.
[12]Liu H,Yu H J,Xiang W.Adaptive fuzzy nonlinear inversion-based control for uncertain chaotic systems[J].Chinese Physics B,2012,21(12):120505.
[13]郑珍,谭满春.不确定参数时滞混沌系统的自适应反同步[J].计算机仿真,2012,29(12):207-210.
[14]王琳.磁弹体混沌系统的电路实现及混沌控制[D].长春:东北师范大学,2011.
猜你喜欢
佳木斯大学学报(自然科学版)(2022年1期)2022-01-14
数字技术与应用(2021年2期)2021-04-22
电子世界(2021年22期)2021-02-28
湖南大学学报·自然科学版(2021年1期)2021-02-21
自动化学报(2019年8期)2019-09-15
安徽师范大学学报(自然科学版)(2015年3期)2015-04-25
电子世界(2015年16期)2015-03-24
博客天下(2014年24期)2014-09-25
西安交通大学学报(2014年7期)2014-04-16
海外文摘(2009年11期)2009-12-31