
ITCC系统用户程序中的缺陷分析与改进
2013-10-31 00:48韩平
石油化工自动化 2013年3期
韩平
(中海石油建滔化工有限公司,海南 东方 572600)
ITCC系统用户程序中的缺陷分析与改进
韩平
(中海石油建滔化工有限公司,海南 东方 572600)
分析了ITCC系统用户程序中存在的缺陷以及对设备运行和联锁保护的不利影响,从安全生产和设备运行实际需要出发,对用户程序进行了探讨和论证,针对性地制订出有效的改进方案,成功地弥补了原程序的漏洞,从而增强了该用户程序的适用性、严密性和可靠性,为装置安全运行和稳定生产打下了坚实的基础。
透平压缩机 机泵 用户程序 缺陷
透平压缩机一体化控制系统ITCC(Integrated Turbine Compressor Control)被广泛用于石油化工等行业生产装置中大型机械设备和复杂程度较高的机组、机泵的监测、操作与管理。该系统除了采用以三冗余结构为基础的硬件设备,同时功能强大、组态灵活的系统软件和应用软件也广受青睐。由于工程技术人员对工艺、设备和操作方面认识的局限,编制用户程序时难免会出现一些错误和缺陷。笔者结合3个实例,分析了ITCC用户程序缺陷的原因与采取的改进措施。
1 压缩机透平冷凝液泵控制程序的分析改进
1.1现象
合成气透平压缩机主冷凝器设置有三冗余液位变送器LT021861A/B/C,控制逻辑中选取三者中值进入比较器,低于设定值时触发联锁保护。
某仪表人员发现A变送器示值较B,C示值低约10%,对其进行了检查处理。经过重新对负向导压管充灌冷凝液,开表后发现指示值逐渐升高,当液位达到56%时冷凝液备用辅泵联锁自启动。
按照选定中值的方案,逻辑表决规定只有三冗余变送器中至少有2台示值达到高限时才能触发备用泵联锁自启动,为什么仅1台达到高限就引发联锁动作了呢?
1.2分析程序
解读应用程序,涉及合成气压缩机主冷凝器液位的联锁动作有三种情况。
1.2.1液位高高触发透平跳车
冷凝器液位高高触发透平跳车的逻辑框图如图1所示。
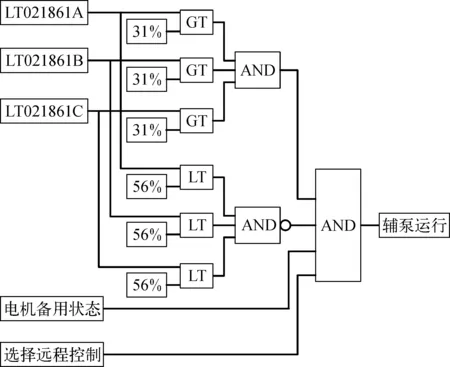
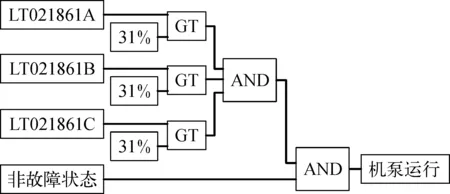
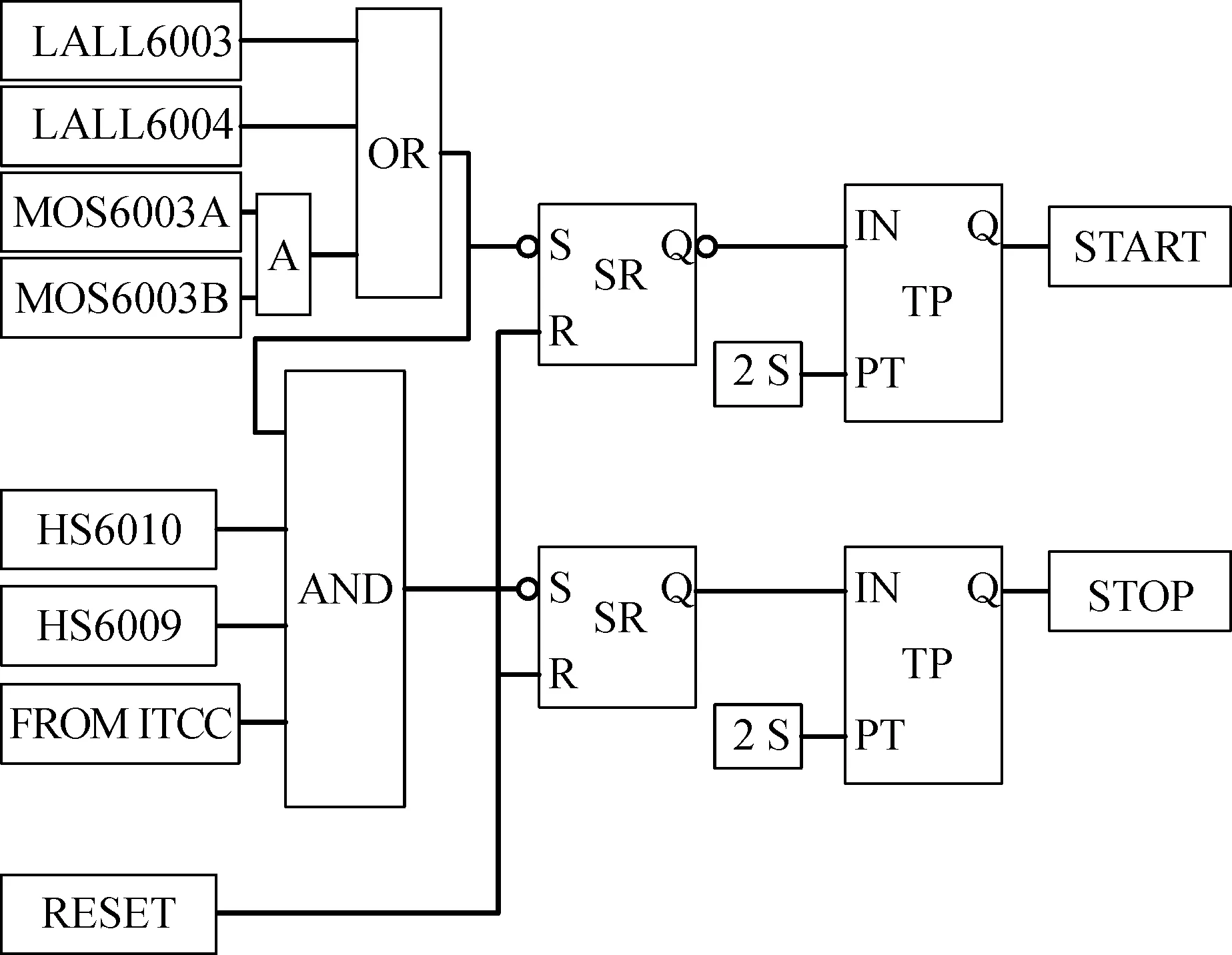
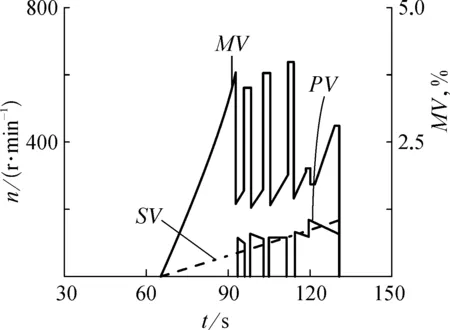
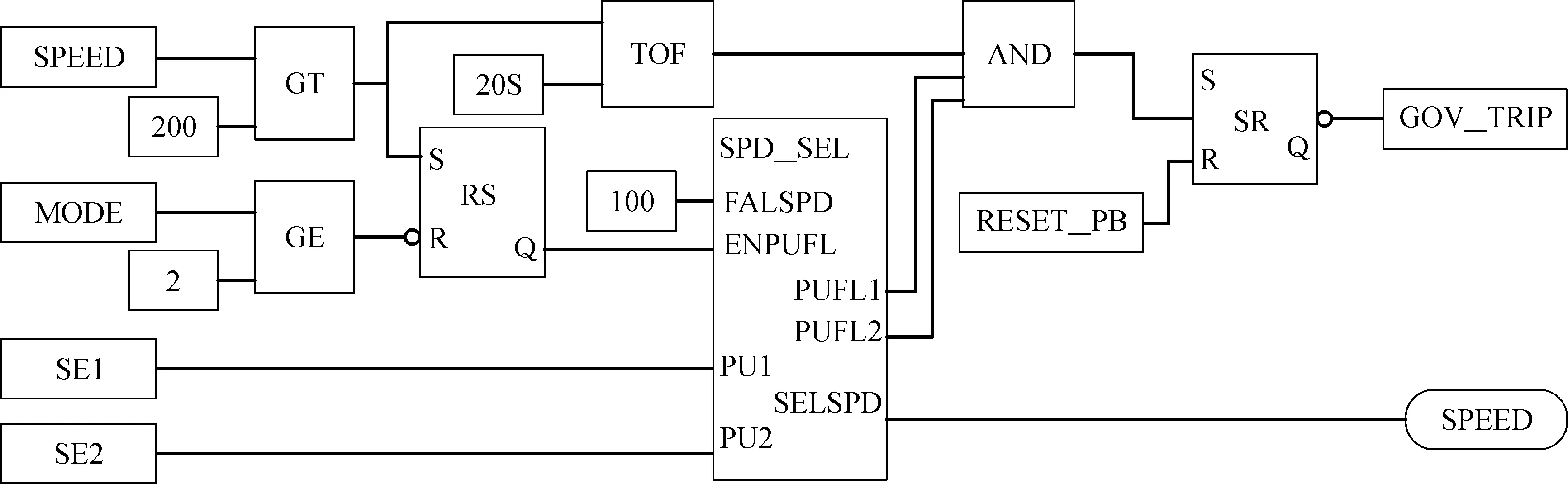
图1中,LT为数据比较模块,当X 图1 冷凝液液位高高触发透平跳车逻辑 1.2.2冷凝液备用泵自启动 冷凝液备用泵自启动逻辑框图如图2所示。图中,GT为数据比较模块,当X>Y时输出为1,否则为0;X代表进入GT比较模块的第1个输入值,Y代表进入GT比较模块的第2个输入值;运算规则是当X>Y时,输出成立;冷凝液备用泵自启动的逻辑,必须同时具备四个条件: 备用泵处于正常备用条件;备用泵控制开关选择在远程操作位置;LT021861A/B/C示值均大于31%;LT021861A/B/C任意1台示值大于等于56%。可见后两个条件都没有遵守多数表决的原则,以上遇到的问题就来源于最后一个条件所触发的结果。 图2 冷凝液备用泵自启动逻辑 1.2.3冷凝液泵自动停运 冷凝液泵自动停运逻辑框图如图3所示。 图3 冷凝液泵自动停运逻辑 由图3可知,使冷凝液泵自动停运的条件: LT021861A/B/C任意1台变送器示值不大于31%;电泵发生故障。 显然第一个条件也不符合多数表决的原则。假如有1台变送器故障示值不大于31%时,无论其操作开关是否位于远程控制位置,都将使正在运行的冷凝液泵自动停运。更为重要的是停泵后主冷凝器的液位必然升高,当达到液位的高报值56%时,若错误信号仍然存在,则其钳位作用使2台 冷凝液泵都无法自启动,此时如果处理不及时液位势必上升最终达到联锁跳车值67%而触发透平联锁跳车。 1.3联锁逻辑改进 1) 冷凝液泵自动停运联锁程序修改。将冷凝液液位低低联锁逻辑中的与门逻辑块改成“三取二”逻辑表决器功能块,实现多数表决有效。 2) 冷凝液备用泵自启动联锁程序修改。将冷凝液液位低低和液位高自启备用冷凝液泵逻辑中的与门逻辑块改为“三取二”逻辑表决器功能块,实现多数表决有效。修改后完善了原有程序,使得联锁动作更加合理、可靠。 2.1异常现象 在装置年度整修后恢复开车阶段,电机驱动的中压锅炉给水泵已经运行,但从ITCC操作画面上却发现联锁处于跳车状态。查看ESD在线程序,虽然各联锁条件均已满足,但因没有进行联锁复位操作,所以该联锁一直处于跳车状态。更为严重的是,即使设备出现故障需要停车保护时却无法获得有效执行,显然有逻辑错误存在。 2.2程序分析 2.2.1联锁逻辑 锅炉给水泵的控制逻辑如图4所示。 图4 锅炉给水泵控制联锁示意 图4中,OR为或门逻辑块;SR为置位优先的双稳态触发器;TP为脉冲输出块。从图4可以看出其动作原理如下: 1) 工艺条件停车。当脱氧槽液位降低到开关LALL6003和LALL6004设定值时,所有锅炉给水泵停车。该联锁设有超驰开关,需要时通过软、硬开关共同作用生效。 2) 人工手动停机。可以使用机泵旁就地停车按钮HS6009或者在DCS操作画面上软开关HS6010实现停机。 3) 机械故障跳车。来自ITCC的停车信号,当机组振动、位移、超速等达到高限时停机保护。 4) 开车操作。上述各停车条件都不存在,通过ITCC中满足允许起动条件,随后按下复位按钮投用联锁后,点按现场操作按钮起动电机运行。 5) 停车动作。机泵运行中,若出现停车因素之一时,SR触发器被置位,触发TP功能块发出 2s 正脉冲将接点送MCC跳闸。 2.2.2联锁缺陷 由于程序设计中仅考虑到送MCC启动和停止信号互为反向,各TP块输出送MCC的2s脉冲之后,该接点恢复到断开状态,即此后MCC无法辨别联锁的真实意图。即使操作方面在没有投用联锁的情况下,只要脱氧槽液位正常之后按下复位按钮,仍可起动电机运行。 2.2.3逻辑改进 通过调查,MCC接受来自仪表控制的两组接点用于电动机的合闸和分闸控制,它是利用电机综合保护器来实现的。仪表的合闸、分闸信号由时长2s的脉冲触发,当现场就地/远程选择开关在远程位置,合闸接点闭合且分闸接点断开,电机会通过操作按钮起动运行;无论是在远程还是就地状态,只要分闸接点闭合,电机就会停运。这是从安全角度出发,设计成分闸优先,即当两接点同时闭合时保持停车结果。 依据控制程序的原理,利用MCC停车优先的条件可修补原有程序的漏洞,即将送MCC分闸信号前的TP脉冲块取消,只有联锁投运正常时才能起动电机,从而保证无论何时,一旦触发联锁保护动作就一定能使电机停运。经过修改程序并通过空载和联动试验,成功消除了原程序的缺陷。 3.1现象 当装置经历停车检修之后启动中压锅炉给水泵透平时,重复两次在出现转速后不久发生联锁保护跳车,报警信息提示“转速探头故障跳车”,当时相关数据的趋势记录如图5所示。 图5 趋势记录示意 图5中转速设定值(SV)按照程序设置的速率逐步接近目标转速;调速阀的信号(MV)逐渐升高到一定值才能反映出转速变化;实际转速(PV)冲转后应跟随设定转速爬升。 由图5可见,当启动指令发出时,目标转速从0跳变至500r/min,转速设定值引导输出值逐渐变大,调速阀达到一定开度后进入透平的蒸汽做功克服机械摩擦力使转子运动,开始的转速信号(约180r/min)超过了设定值,输出随即变小使得转速回0后反复跳变。跳车时距离首次出现转速仅 40s, 转速还不到200r/min,且当时转速指示并无异常,何以触发联锁保护跳车呢? 3.2原因分析 3.2.1检 查 由于连续两次起动都以失败告终,并且表现形式相同。首先检查探头有无问题,事实上停车期间探头没动,并且从键相探头和超速保护“三取二”转速探头指示值都能够证实调速器转速探头示值正确无误。 通过进一步分析ITCC内部程序也没有修改过,调速系统唯一变化的是更换了调速阀的阀门定位器。把原安装在阀体上的整体型电/气定位器改装成脱离阀体安装的分体式阀门定位器,其目的是克服阀门振动和高温对定位器的不利影响,以获得更高的转速调节品质。再次检查阀门定位器动作正常,记录曲线也证明阀门动作灵敏正常。 3.2.2程序分析 透平测速探头使用的是无源磁性探头(peak-up),它不能像普通4~20mA信号的变送器那样简单地设置1个超出量程的阀值去定义变送器故障。测速探头是无源的,无转速条件下检测回路内既无电流,也无电压,不好界定其是否存在故障。 当透平转子转动时,测速探头通过测速齿轮切割磁力线产生与实际转速成正比的系列脉冲信号传给ITCC,而脉冲的多少实际上也无法定义转速探头是否故障。程序中对测速探头故障认定的方法是当测速探头的指示值达到一定量之后,再发生转速值下降至不可能出现的过低数值时,该机组设置高于200r/min激活测速探头故障检测功能,当示值小于100r/min时,即视为故障状态。联锁逻辑中的功能块如图6所示。 图6中,GE为数据比较模块,当X≥Y时输出为1;RS为复位优先的双稳态触发器;SR为置位优先的双稳态触发器;TOF为延时断开功能模块;SPD_SEL为转速选择处理模块。 解读设计逻辑,当机组运行模式大于2,即冲转暖机及以后阶段,选取两个测速探头输入信号中的高值大于200r/min时,激活探头故障检测功能;若出现所有转速都小于100r/min时即判定为探头故障,同时以此发出跳车保护指令。 图6 转速探头故障示意 3.2.3结 论 通过分析不难得到结论: 由于更换了定位器,新的定位器比旧的反应更加灵敏,得到冲转指令后很快有了转速反应,但这时转速设定值还未达到200r/min,只能围绕设定值跳变。当透平转速一旦到达或者超过200r/min时,即启动测速探头故障监测程序,此后发生的低于100r/min情况便触发“测速探头故障跳车”联锁动作。 3.3程序改进 通过修改触发检测测速探头故障的阀值,脱离转速变化跳变区,即可有效地避开可能引发跳车的区段。调出过去的升速曲线,发现当高于300r/min 以上时跳变就消失了。按照确定方案,把ITCC程序中设置的激活测速探头故障检测值由200r/min修改为300r/min。按修改后的程序,进行前述操作,有效地防止了不必要的跳车现象发生。 综合以上事例,表明初始编制的用户程序难免会存在一些缺陷和不足。技术人员需结合设备运行条件及工况的实际要求,有针对性地对问题根源和程序细节加以研究并制订出改进措施,使之逐步得到完善,能够有效地保证机组设备在实际应用场合的各种条件变化时都能够实现安全、稳定运行。 [1] 陆德民,张振基,黄步余.石油化工自动控制设计手册[M].3版,北京: 化学工业出版社,2000. [2] 王树青,乐嘉谦.自动化与仪表工程师手册[M].北京: 化学工业出版社,2010. [3] 鄢景华.自动控制原理[M].哈尔滨: 哈尔滨工业大学出版社,2000. [4] 阳宪惠,郭海涛.安全仪表系统的功能安全[M].北京: 清华大学出版社,2007. [5] IEC. IEC 61511流程工业领域安全仪表系统的功能安全[S].IEC,2003. [6] IEC. IEC 61508电气/电子/可编程电子安全系统的功能安全[S].IEC,2000. [7] 李红春,夏毅.压缩机综合控制系统在催化裂化装置中的应用[J].石油化工自动化,2012,48(04): 41-42. [8] 周春辉.化工过程控制原理[M].2版,北京: 化学工业出版社,1998. [9] 张宇.仪表保护装置的新解读[J].石油化工自动化,2009,45(05): 90-92. [10] 王茂君.用PLC实现电动机分批再启动及自动切换[J].石油化工自动化,2007,43(04): 63. 稿件收到日期: 2013-02-26。 韩平(1956—),男,现就职于中海石油建滔化工有限公司电仪技术部,主要从事化工仪表自动化设备维护检修工作,任工程师。 TP273 B 1007-7324(2013)03-0061-04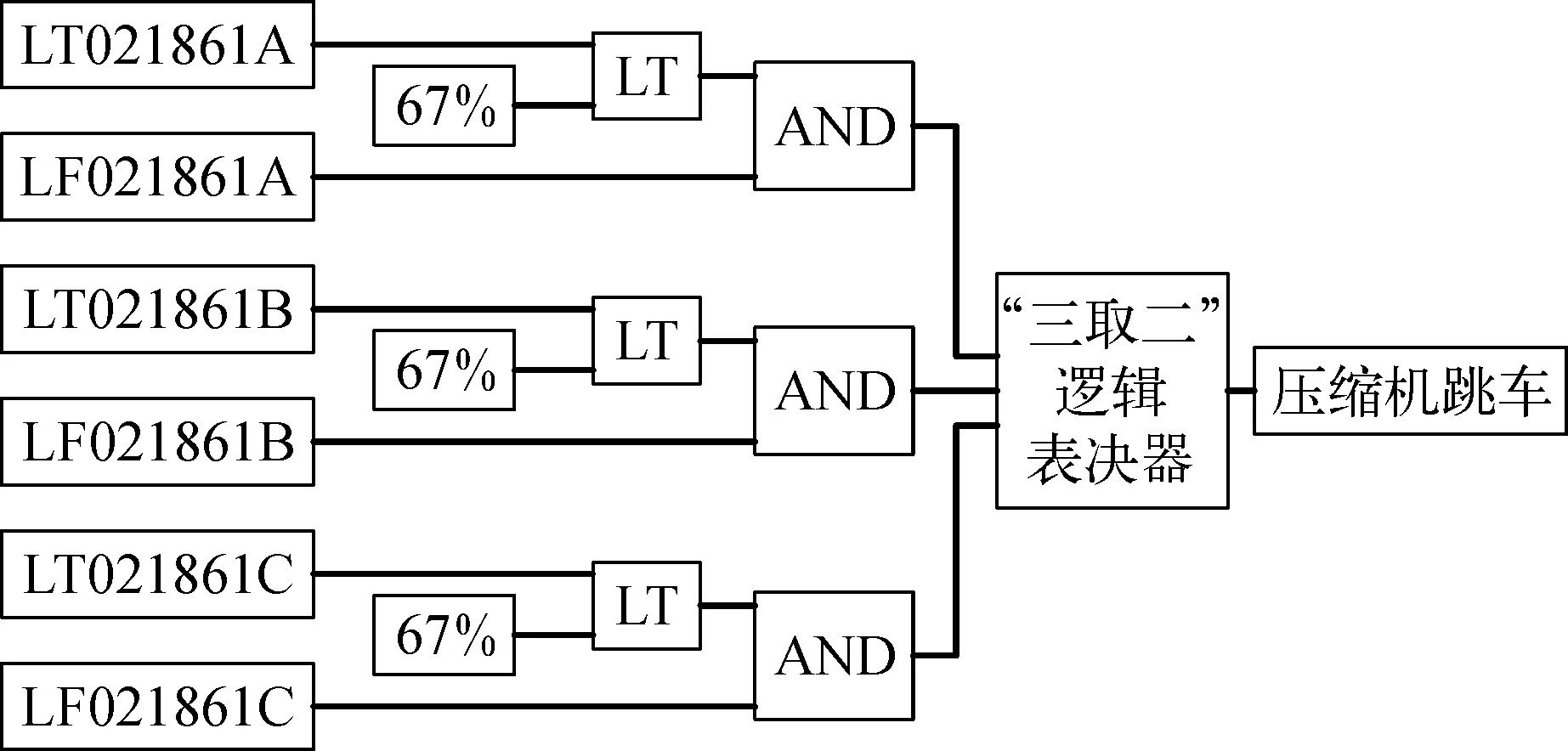
2 锅炉给水泵联锁控制程序的改进
3 透平转速故障停机程序的改进
4 结束语
猜你喜欢
机械工业标准化与质量(2021年7期)2021-10-12
电子技术与软件工程(2020年17期)2020-02-02
工程与建设(2019年1期)2019-09-03
意林原创版(2019年5期)2019-06-05
质量技术监督研究(2018年1期)2018-03-26
中国公路(2017年15期)2017-10-16
中国公路(2017年11期)2017-07-31
电脑知识与技术(2017年14期)2017-07-10
中国公路(2017年12期)2017-02-06
电子设计工程(2014年8期)2014-03-28
