
阵风发生装置流场测量与分析
2013-11-20 10:12屈晓力聂旭涛
实验流体力学 2013年6期
朱 博,刘 琴,屈晓力,聂旭涛
(中国空气动力研究与发展中心,四川 绵阳 621000)
0 引 言
飞机在大气中飞行,经常会受到阵风(或称突风)和大气紊流干扰,形成附加的气动载荷和机翼弹性模态振动,引起飞机颠簸,最终造成疲劳损伤甚至损坏。国际通用的民用飞机适航条例明确规定新型民用客机必须通过阵风响应检验才能交付使用,合理确定阵风载荷并减缓阵风影响对于确保飞机飞行安全具有重大意义[1-3],因此,阵风发生器作为飞机防阵风设计的试验装备,在国际上得到了有效发展[4-6]。
为了准确评估阵风对飞机模型的影响,首先要掌握阵风发生器产生的流场幅值和频率特性[2,7],但是国内有关阵风发生器的实验研究较少。以叶栅型阵风发生器为研究对象,以电机驱动控制叶栅按照一定规律摆动,在风洞中产生阵风流场,对二维热线测量阵风流场特性的方法进行了研究。阵风气流按类正弦规律变化,阵风剖面的幅值可以调节,在模型中心处,形成较大的阵风幅值(Y向速度)。利用二维热线测量了不同工况下的流场特性,采用角度修正和阵风波形相位分析方法,测量分析了不同来流速度下,叶栅不同弦长、不同组合数、不同摆动频率和不同摆动角度所产生的阵风波形特性。
1 试验设备及试验装置
1.1 风洞设备
试验在中国空气动力研究与发展中心的低湍流航空声学引导风洞的闭口试验段上进行。该风洞为回流式低速风洞,配有可更换的开、闭口两种试验段。
1.2 阵风发生器试验装置
阵风发生器试验装置包括叶栅驱动机构和热线移测装置,见图1。

图1 阵风试验装置Fig.1 Gust generator test system
叶栅驱动机构用于实现叶栅按类正弦规律摆动,安装在风洞闭口试验段上,组成主要包括NACA0018翼型的叶栅组件、曲柄摇臂机构、驱动电机、电机支架、支撑圆盘、支撑框架、支撑架等。叶栅摆动频率分为4、6、9、12和15Hz等5个状态,叶栅摆动角度分为8°、14°、22°和30°等4个状态,叶栅弦长分为50、75和100 mm 等3种类型,叶栅组分为1片叶栅、2片叶栅和3片叶栅等3种构型,来流速度分为20、30和40m/s等3个状态。
1.3 热线风速仪
采用丹麦DANTEC 公司Stream Line CTA 多通道热线风速仪系统,设备主要技术指标:频率响应:≤450k Hz;测速范围:0.02~300m/s。
2 流场测量方法
2.1 二维热线测量方法及在线角度修正
采用X 型二维热线探针测量风洞中的X和Y向速度,X 型热线探针结构和测量原理图见图2。一般情况下,二维热丝使用前要进行速度系数标定和方向角标定[8]。由于二维热丝两个传感器的一致性差异会导致探头的输出初始测量角度不一定为零,因此必须在标准校准器上进行角度标定,从而消除角度零点。
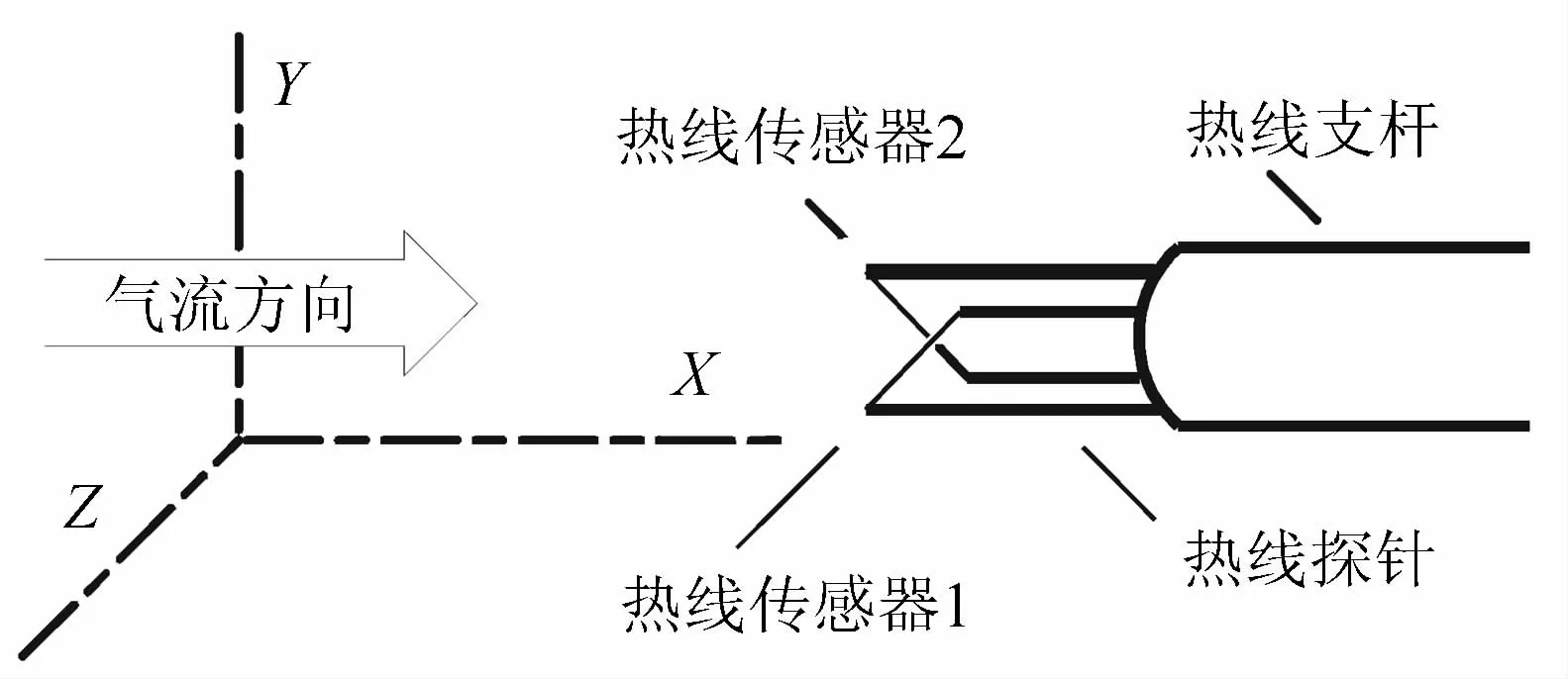
图2 X 型热线探针结构和测量原理Fig.2 Structure and measurement of X-array hot wire
但是在试验中,即使进行了预先的角度标定,风洞洞体安装角度、模型安装角度和热线探头支架安装角度的偏差还会重新引入测量角度误差。如果采用机械调校的方法,每个工况都要单独调试,不仅难度大,而且效率低,几乎难以达到理想的效果。因此考虑把这三种角度偏差综合为一个探头的初始俯仰角度,以每个工况下的叶栅角度调平后的热线测量值反算这一初始角度,把这一初始角度带入这个工况下的试验数据中进行修正计算。采用这种在线角度修正方法,可以提高试验效率和测量精度,具体方法如下:
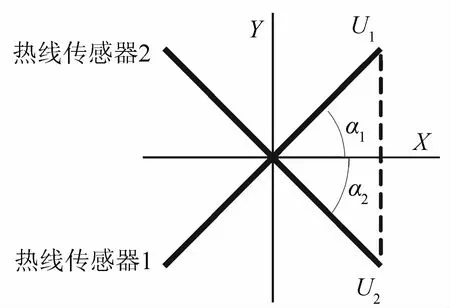
图3 X 型热线探针速度分量测量原理Fig.3 Component velocity measurement of X-array hot wire
分析X 型热线探针速度分量测量原理见图3。其中,热丝传感器1与热丝传感器2互相垂直,在理想状态下分别与流向速度的夹角为45°。U1为热丝传感器2测量到的理想流场速度分量(在测量平面上垂直于热丝传感器2),α1为热丝传感器1与流向速度的夹角,U2为热丝传感器1测量到的理想流场速度分量,α2为热丝传感器2与流向速度的夹角。流场X向速度UX和Y向速度UY可以根据下式计算:

通过标定,可以使得水平放置的二维热线探针的Y向速度UY为零,但是由于风洞洞体安装角度、模型安装角度和热线探头测量支架安装角度的偏差,导致UY不为零,因此,UY初始值反映了综合角度偏移量,可以通过UY的初始值反算综合俯仰角。
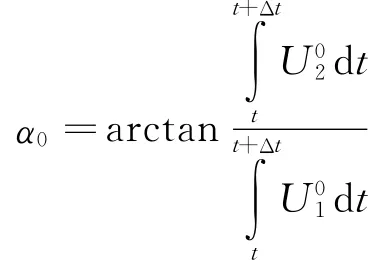
把α1+α2=,理论Y向速度UY0=0,热丝传感器1测量到的初始流场速度分量U01,热丝传感器2测量到的初始流场速度分量U02,带入(1)式得到综合俯仰角α0:
修正后的Y向速度UYc为:

二维热线角度修正效果见图4。该图是弦长为50mm 的叶栅,摆动角度为8°,摆动频率为4Hz,来流速度为40m/s,热线综合俯仰角为37°条件下获得的流场测量结果和修正结果。结果表明,修正前的Y向速度零点位置偏移到y=-8m/s轴线附近,修正后的Y向速度沿y=0m/s轴线对称;修正前在速度中值部分有较大的尖峰,修正后较合理;修正前后的阵风幅值相差约4%~5%。
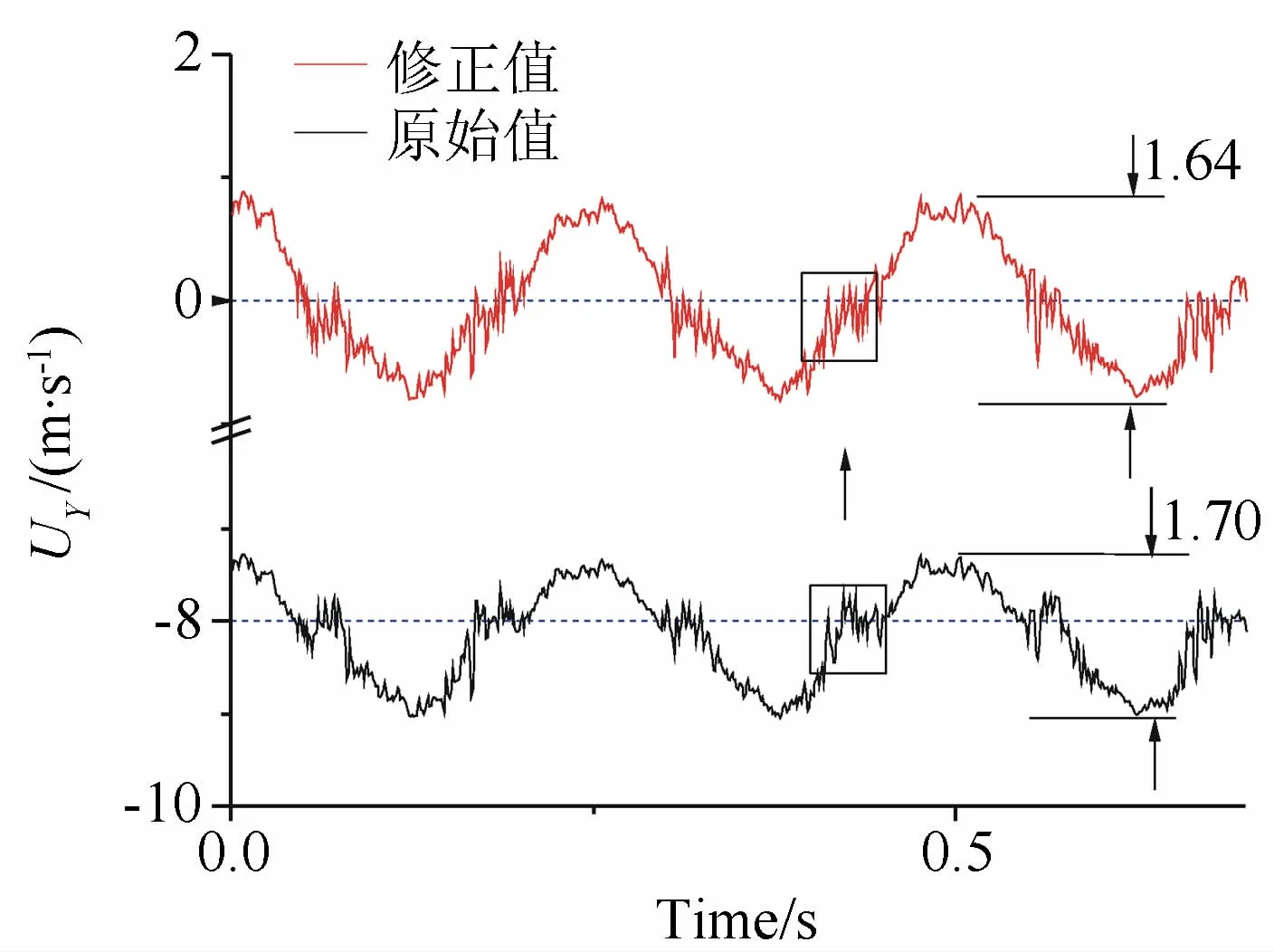
图4 二维热线角度修正效果Fig.4 2D hot wire measurement angle correction
2.2 类正弦阵风的幅值和稳定性计算方法
阵风的幅值和稳定性是阵风试验最关心的流场参数。风洞中典型的类正弦阵风时间历程见图5,其幅值在不同时间历程上是波动的,但是为了实现模型试验数据的可重复验证性,要求阵风发生器产生的阵风幅值和波形稳定而且测试结果可重复验证。
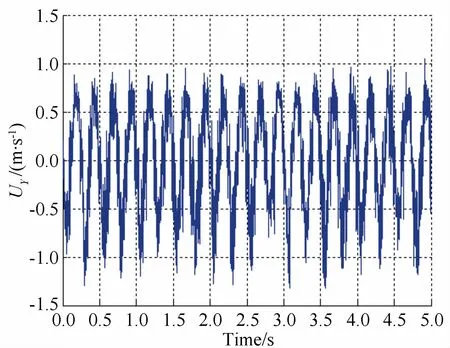
图5 类正弦阵风时间历程Fig.5 A typical sinusoidal gust history
在CFD 计算中一般采用Y向幅值的最大值UYmax来表示阵风幅值(速幅)[9],但是在实验中由于洞壁的干扰作用,导致UYmax不稳定,因此采用Y向各相位的平均幅值的最大值来描述阵风的Y向速度幅值AY:

其中,U¯YΦ为相位相同的Y向速度的平均值,Φ。
一般气流的稳定性用脉动量和湍流度来表示,定常气流的脉动速度可以表示为当前速度减去平均速度,但是类正弦气流的平均速度基本为零,不适合用于计算气流脉动量,因此采用等相位速度脉动量U′Φ来描述类正弦气流波形的不稳定性:
其中,UΦ为相同相位的瞬时速度值,¯UΦ为相同相位的平均速度值。进而相同相位的气流湍流度可以表示为:

图6是对图5的阵风时间历程进行相位特性统计的结果,由图可见,其直观地表示了各个相位上的气流脉动量、阵风幅值和波形特征。

图6 一片叶栅的波形相位特征Fig.6 Gust phase character with one vane
3 测量结果和特性分析
3.1 叶栅组数和摆动频率对阵风波形特性的影响
图6~8是在试验段安装不同数量的叶栅(一片叶栅、两片叶栅和三片叶栅,叶栅的弦长为50mm,间距为60mm),在来流速度为30m/s的情况下,调节叶栅摆幅为8°,摆动频率为4 Hz,测量距叶栅后缘100mm 处流场的Y向相位速度、相位平均速度、相位速度脉动量。测量数据采样率1k Hz,采样长度5s。结果表明,单片叶栅在各个相位产生的速度脉动都较大;多片叶栅比单片叶栅产生的正弦气流幅值稳定,即多片叶栅的波峰波谷气流速度脉动量较小,说明多片叶栅可以有效抑制带迎角的翼尖流动分离,对类正弦流动的峰谷波形整流效果较好;各种组数条件下都在叶栅水平位置附近产生较大的速度脉动,说明翼根与流速夹角在0°方向发生正负方向切变时,由于翼尖上下压力差发生突变,导致尾流涡产生方向发生突变并释放,形成较大的流动分离,各种叶栅组合方式对其都无明显改善,这是下一步进行优化设计需要研究的问题。

图7 两片叶栅的波形相位特征Fig.7 Gust phase character with two vanes
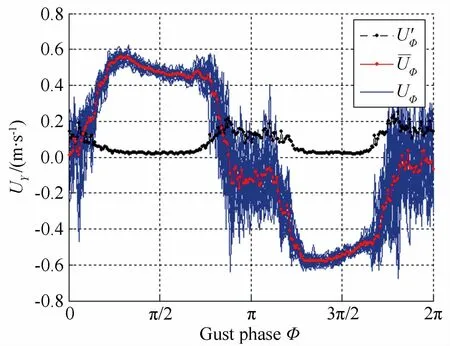
图8 三片叶栅的波形相位特征Fig.8 Gust phase character with three vanes
在一般情况下,风洞中的阵风波峰波谷振幅对称,因此阵风幅值等同于阵风波峰值,采用波峰速度脉动量U′peak和波峰湍流度εpeak就可以描述阵风幅值的不稳定性。图9是不同组数的叶栅在摆幅8°、不同摆动频率下产生的Y向风速峰值的速度脉动量和湍流度值。由图可见,由于一片叶栅产生的阵风峰谷流动分离较大,导致其产生的峰值脉动量高于多片叶栅,但是当摆动频率增加时,叶栅摆动的整流机制逐渐控制尾流大涡结构的产生机制,导致其峰值气流脉动量随摆动频率的增加而逐渐减小;由于多片叶栅产生的峰谷流动分离较小,因此其产生的峰值脉动量随摆动频率的增加无明显变化,但是,由于平均幅值随摆动频率的增加而变大(见图10),因此峰值湍流度随摆动频率的增加而变小。
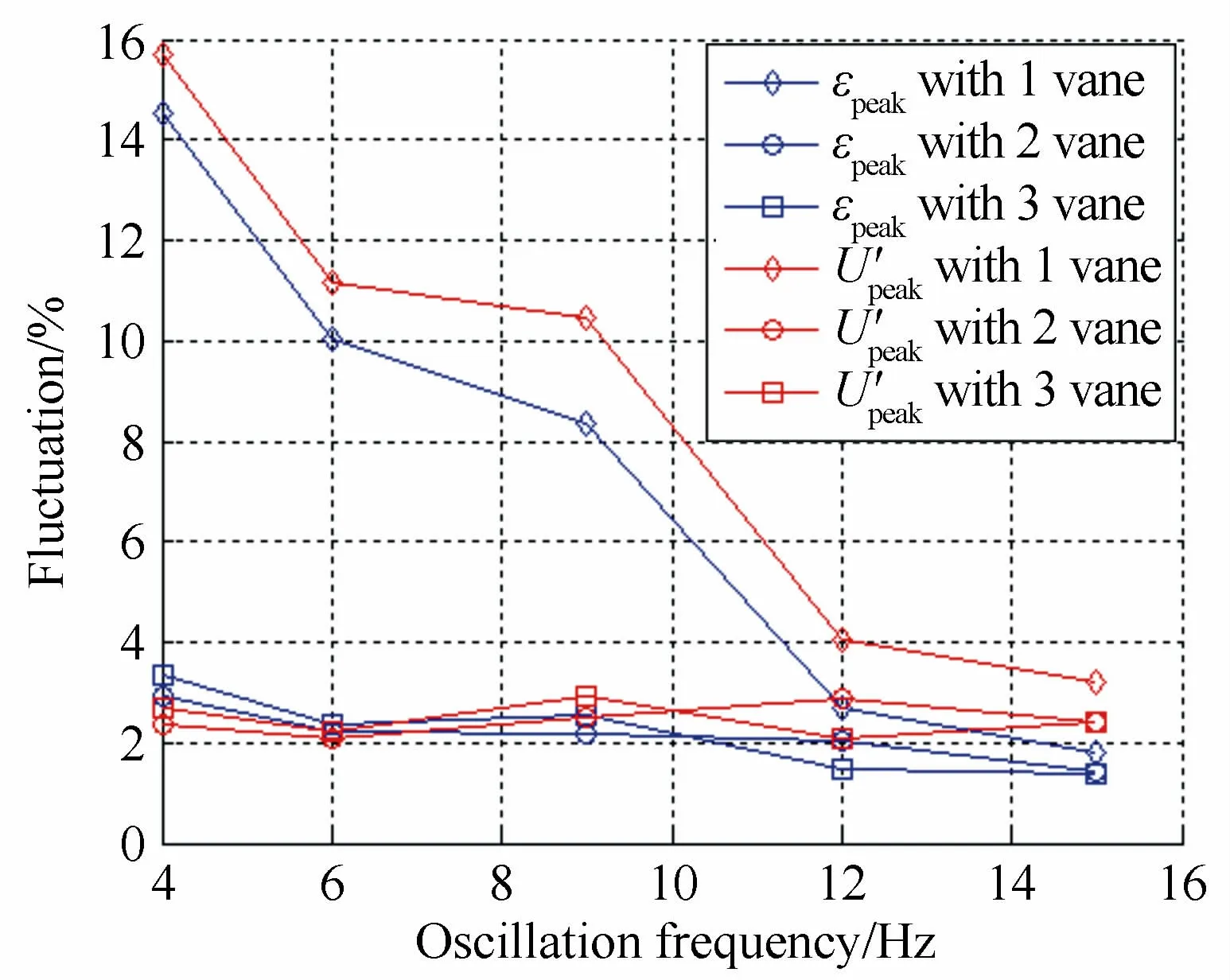
图9 叶栅数量和摆动频率对气流峰值脉动量的影响Fig.9 Gust peak fluctuation vs numbers of vane and oscillation frequency
3.2 叶栅摆动频率和来流速度对阵风幅值的影响
图10是一片叶栅在摆幅为8°,不同摆动频率和来流速度下,在下游100mm 处测量得到的侧向正弦阵风平均幅值。实验结果表明,由于测点距离叶栅比较近、阵风速幅损失小,在4~15Hz的摆动频率范围内,阵风速幅随着摆动频率的增加而增加,未观测到阵风速幅对频率的极值,随着频率继续增加和效率损失,理论上存在这一极值,考虑到试验目标和安全性问题故而未继续增加摆动频率;在来流速度30m/s以下,阵风速幅随来流速度的增加而增加,在来流速度30~40m/s之间有一个阵风速幅的极值。以上关于阵风速幅与摆动频率、来流速度的关系,和文献[9]的CFD 计算结果吻合。
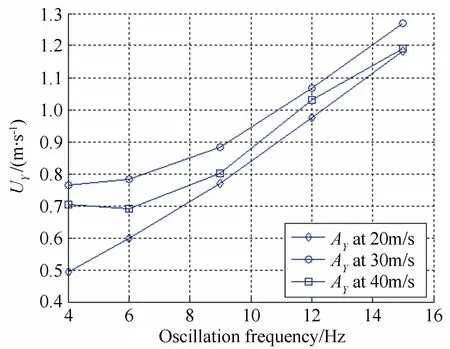
图10 叶栅摆动频率和来流速度对波形幅值的影响Fig.10 Gust amplitude vs.flow speed and vane oscillation frequency
3.3 叶栅不同摆动角度对阵风幅值和脉动量的影响
图11是一片弦长为100mm 的叶栅,摆动频率为6Hz,在不同摆动角度和来流速度的条件下,在下游100mm 处测量得到的侧向正弦阵风平均幅值和峰值脉动量。实验结果表明,弦长为100mm 的叶栅在同等条件下产生的阵风幅值比弦长为50mm 的叶栅产生的阵风幅值大;在8°~30°的范围内,摆动角度越大则阵风幅值越大;摆动角度大于14°以后,由于大迎角流动分离作用,导致阵风的峰值气流脉动量明显增大,例如图12是来流速度20m/s、摆动角度14°产生的阵风波形相位特性,由图可见,波峰波谷的气流脉动量明显较大,与相位平均值相差较大的速度域是流动分离最明显的地方,这也是导致此工况下阵风峰值脉动量和速幅偏大的原因。
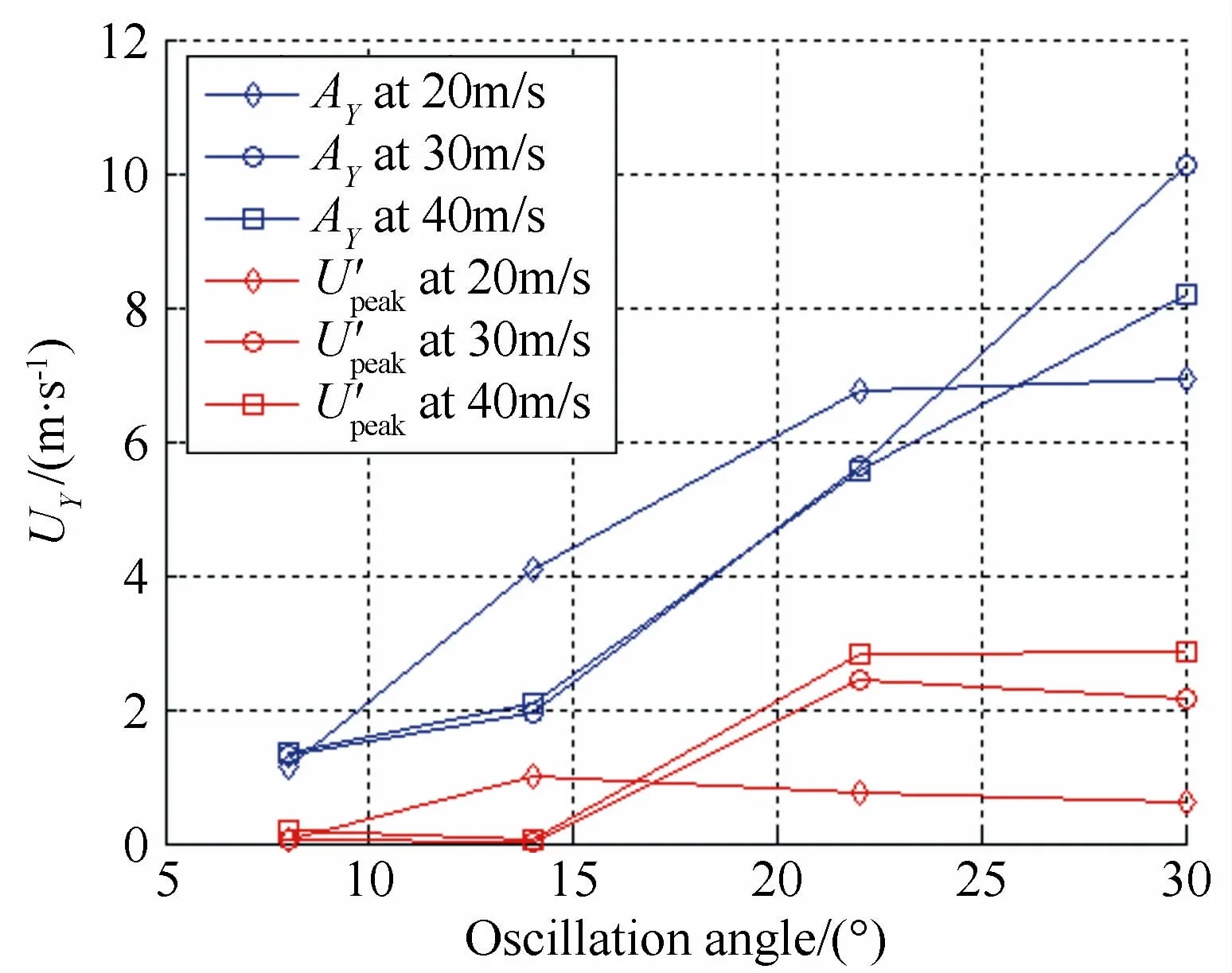
图11 叶栅摆动角度对波形幅值和峰值脉动量的影响Fig.11 Gust amplitude and peak fluctuation vs vane oscillation angle

图12 来流速度20m/s,摆动角度14°的阵风波形相位特性Fig.12 Gust phase character at vane oscillation angle of 14°and wind speed of 20m/s
4 结 论
给出了二维热线测量叶栅型阵风发生装置流场的测试方法、分析方法和测试结果,实验结果表明:
采用风洞在线角度修正,可以提高二维热线的Y向测量精度和测试效率。
采用波形相位分析方法,可以满足阵风发生器产生的周期性波形的幅值和流场脉动量分析。
阵风幅值与4~15Hz的叶栅摆动频率、8°~30°的叶栅摆动角度、50~100mm 的叶栅弦长成正比关系。阵风幅值与来流速度有一定关系,在来流速度30~40m/s之间有一个阵风幅度的极值。
单片叶栅产生的峰值气流脉动量大于多片叶栅产生的峰值气流脉动量。
阵风波形的不稳定性(等相位速度脉动量)与叶栅摆动角度、来流速度有一定的线性关系,在本试验范围内随叶栅摆动角度、来流速度的增加而增加,同时,适当的叶栅摆动频率可以降低叶栅的波形不稳定性。分析原因,主要是阵风气流的等相位速度脉动量取决于叶栅尾流分离涡的形成和脱落,而分离涡的发展又取决于来流速度和叶栅迎角产生的叶栅上下表面压差,因此较大的叶栅摆动角度、来流速度可导致较大的尾流脉动,同时,适当的叶栅摆动频率在一定程度上可以影响分离涡的形成和脱落,从而达到整流效果。
[1] DANIELLA E Raveh.CFD-based models of aerodynamic gust response[J].Journal of Aircraft,2007,44(3):888-897.
[2] 陈磊,吴志刚,杨超,等.弹性机翼阵风响应和载荷减缓与风洞试验验证[J].工程力学,2011,28(6):212-218.
[3] 袁刚,李爱军,王长青,等.多舵面大型民机阵风减缓系统设计[J].飞行力学,2011,29(4):65-67.
[4] TANG D M,CIZMAS Paul G A,DOWELL E H,et al.Experiments and analysis for a gust generator in a wind tunnel[J].Journal of Aircraft,1996,33(1):139-148.
[5] 刘志强,史志伟,白鹏,等.双翼微型飞行器水平阵风响应实验研究[J].实验流体力学,2009,23(3):54-57.
[6] 史志伟,刘志强,丁超,等.柔性翼微型飞行器水平阵风响应特性实验研究[J].实验流体力学,2010,24(6):1-5.
[7] RICCI S,SCOTTI A.Wind tunnel testing of an active controlled wing under gust excitation[R].AIAA 2008-1727.
[8] 盛森芝,徐月亭,袁辉靖.热线热膜流速计[M].北京:中国科学技术出版社,2003.
[9] 刘晓燕,吴志刚,杨超,等.阵风发生器流场特性分析与试验验证[J].北京航空航天大学学报,2010,36(7):803-807.
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
军事文摘(2021年19期)2021-10-10
军事文摘(2021年17期)2021-09-24
实验流体力学(2021年2期)2021-05-18
实验流体力学(2021年2期)2021-05-18
实验流体力学(2021年2期)2021-05-18
风机技术(2021年1期)2021-03-24
航空世界(2018年12期)2018-07-16
舰船科学技术(2015年8期)2015-02-27
延河(下半月)(2014年2期)2014-02-28
