
固定闭塞下具有容错性质的车次追踪模型
2013-11-26 07:11袁志明
铁路计算机应用 2013年8期
袁志明,迟 骋,郭 戬
(1.中国铁道科学研究院 通信信号研究所,北京 100081;2. 中国铁道科学研究院 运输及经济研究所,北京 100081)
随着铁路信息化建设的不断发展和完善,智能化的调度指挥系统已逐步成为我国铁路行车指挥中不可或缺的重要部分。列车调度指挥系统(TDCS)和分散自律调度集中(CTC)系统提高了行车指挥的效率和安全性,成为调度人员制定调度决策,指挥列车运行的必要工具。
调度指挥人员从调度指挥系统中获取列车的时空位置,结合其他信息制定列车的运行决策,或对列车的运行状态进行适当调整。因而车次号的正确性是制定调度指挥决策的基础之一,也是CTC系统自动化功能正常运行的基本条件。但在实际运营中,由于采集设备的扰动、通信信道的干扰或线路上轻车跳动等原因,导致车次信息的丢失或车次显示错误,通常需要人为地频繁介入才能保证调度系统中车次信息的完全正确性。
文献[1]、[2]中对于车次追踪算法的研究,在车站元素的状态与列车的状态可以建立完备对应关系的基础上,以进路和线形连接元素模式为主导,站内追踪过程与车站的进路完全绑定,站间追踪绑定区段对象,这限制了算法实现的灵活性。由于车站拓扑形式、进路形式以及站间连接关系的多样性,很难将所有的模式进行详细的归类划分,而车站与车站间的联系也并不一定以区间的方式连接,诸如有些大的编组站存在多个场间通过道岔实现过渡连接,这些均会增加系统实现的复杂性。
本文在车次追踪问题分析的基础上,结合有限自动机理论,以提高追踪车次的正确性为优化目标,提出了一种以车站对象为主导并具有容错性质的车次追踪模型,并对算法进行了实际应用。
1 车次追踪问题的分析
在固定闭塞模式下,调度系统通过车站元素的占用情况来推算列车的实际位置,同时结合计划信息、人工输入、无线车次号系统等辅助信息来获取初始列车车次信息以及纠正错误的车次信息。
由于调度指挥系统没有同线路上的列车建立直接的联系,其获取的所有列车的位置信息均是建立在间接的推算上,即主要通过车站元素(道岔,区段,股道等)的状态信息来推算列车的实际位置,即车站元素与列车位置存在的相互对应性,在理想情况下,这种对应性可以视为完备的。而在实际的非理想环境中,调度系统获取到的车站元素状态信息并不能与列车的位置建立起完全的对应关系,如列车占用某车站股道,该股道应为占用状态,但也有可能由于轻车跳动等原因,导致股道状态显示为空闲。而某股道为占用状态,也并不能以此确定该股道上有列车停留,也有可能是由于计轴故障或是发生了其他问题,导致了该股道继电器导向了安全侧。另外由于传输系统的原因,也可能导致调度系统获取的车站元素状态信息并不完备,从而也干扰到了其输出的车次追踪结果的正确性。
目前为改善调度系统车次追踪信息的准确性,许多线路上均设立了无线车次号信息装置,其基本原理都是将机车监控装置中的车次号、机车号、公里标等信息通过专用安全接口在规定的地点和规定的时间发送到调度集中系统[2],调度集中系统结合无线车次信息对车次追踪的结果进行修正。但由于无线车次号系统的信息与固定位置有关,不能实现在全线路上信息的连续性,只是在有限的部分点提供信息,这也只能在一定程度上修正车次追踪的结果。
由以上分析可知,在未能获取详尽的列车位置信息的情况下,只依据车站元素的状态进行间接运算,即便有其他辅助手段,车次追踪系统输出的车次结果也不可能完全正确。但根据列车运行本身的特性,建立特定有效的算法模型,可以提高车次追踪的正确性,进而降低因修正车次问题导致的人员参与性,降低相关人员的工作强度,提高整个调度系统的可靠性。
2 有限自动机
有限自动机是计算机软、硬件研究的重要基础理论。在软件设计中为设计者提供一种有效的解决问题的思想和方法,具有任意有限数量的内部格局或状态,用来记忆过去输入的有关信息,根据当前的输入可以确定下一步的状态和行为,从状态移动到状态。一个有限自动机等价于一个状态转移图。这样的状态转换图可以应用于有限自动机有关定理和算法的等价变换、约简,然后用程序实现。
一个有限自动机包括:
(1)一个有限的状态集合,通常记作Q;
(2)一个有限的输入符号集合,通常记作∑;
(3)一个转移函数,以一个状态和一个输入符号作为变量,返回一个状态。通常记作δ;
(4)一个初始状态q0,是Q中状态之一;
(5)一个终结状态或接受状态的集合F,集合F是Q的子集;
通常用“五元组”来记录以上有限自动机:
A = (Q, ∑ ,δ, q0, F)
3 固定闭塞下的追踪模型
3.1 理想情况下的追踪模型
在固定闭塞制式下,列车的运行具有其独特的时空属性,即列车在某一时刻完全拥有某一闭塞区间或进路的占有权,这种占有权具有完全的排他性质。列车的运行具有时间和空间上的连续性,即时间上列车每一时刻均有其固定的位置;空间上,列车在线路上的位移是连续的,从一个车站元素移动到下一个车站元素,不会有在元素之间出现跳跃的现象。车次追踪的过程即是动态实时的标识每一列车的所在位置的过程。
基于列车空间上运行的连续性和位置占有权的排他性,可以认为列车依次经过其路径上的每一元素,故可以将车次与元素间建立对应关系,即元素依次显现的占用状态体现了列车的行进路径,这样就可以忽略掉其与车站内进路的依赖关系,仅通过计算车站元素状态即可实现列车车次的追踪。
定义下列标识:
G:线路元素的集合(股道,区间,道岔等);
定义元素连接函数:

定义G的子集E(p) :

表示所有与元素p相邻接的车站元素。
定义元素的信号状态函数:

由(1)、(2)、(3)可得出列车位置转移函数为:

3.2 基于有限自动机的容错模型
由以上分析可知,列车的位置依赖于车站相邻元素间的信号状态和列车状态,但在实际环境中,车站元素的状态并不能完全体现列车的位置。由于各种外界干扰,信号设备本身的故障,以及传输设备可能出现的信息抖动或丢失,使得列车位置和元素状态间依赖关系并不牢固。
对于实际运营中的车次追踪系统经常出现的问题,将故障划分为两大类:一类是因为实际的信号状态与列车状态的不匹配,如元素处于占用状态,但实际上该位置并无列车;一类为调度系统接收到的信号状态由于传输设备等的原因,出现数据包的抖动或丢失。针对以上两类问题可以用在理想模型上建立基于有限自动机的状态转移模型,以及引入元素抖动抑制算法解决。
3.2.1 状态转移模型
建立有限自动机模型,A = (Q, ∑,δ,q0,F),其中:
Q:车站所有元素的集合;
∑:列车经过路径上的元素集合;
δ:列车位置转移函数,见公式(4);
q0:车站元素的初始状态;
F :列车在元素上的状态集合;
由于实际环境中,车站元素和列车实际占用状态存在多种组合,而列车的行进依赖于列车的位置转移函数,现以列车路径上相邻的两元素A、B为例,列车行进方向为从A至B,实现的列车状态转移如图1所示。
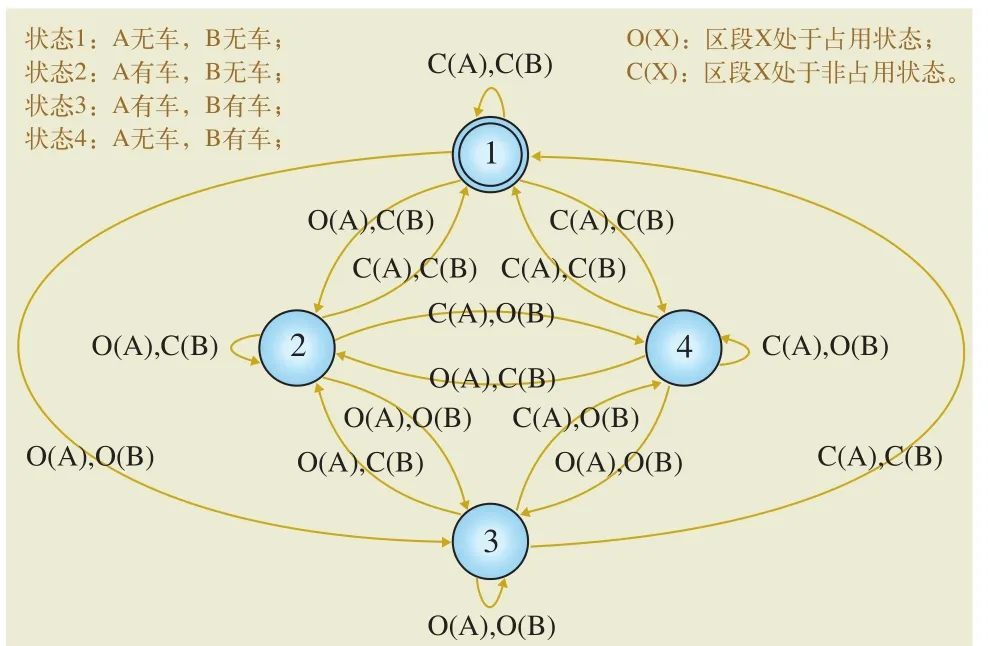
图1 状态转移图
3.2.2 元素抖动抑制算法
在实际应用中,调度集中系统接收到元素状态信息经常会出现抖动,即元素的状态在很短的时间内不断变化。这种变化若不被及时处理,则会导致车次追踪系统内列车状态转移表出现絮乱,无法给出列车追踪的正确结果。为提高系统的容错性能,必须过滤掉此类干扰。
由于列车行进的连续性和速度的限制性使得列车不可能在很短的时间内从一个元素快速地行进到下一个元素。而列车占用位置的排他性,也不允许被占用的车站元素刚刚出清,就在很短的时间内被占用,故在模型内引入元素抖动抑制算法来对信号的抖动现象进行处理,对信号的抖动状态进行滤波处理,使处理后的信号状态更贴近于理想中的信号状态。抖动抑制算法的实现流程如图2所示。
3.2.3 容错模型
最终的车次追踪容错模型如图3所示。
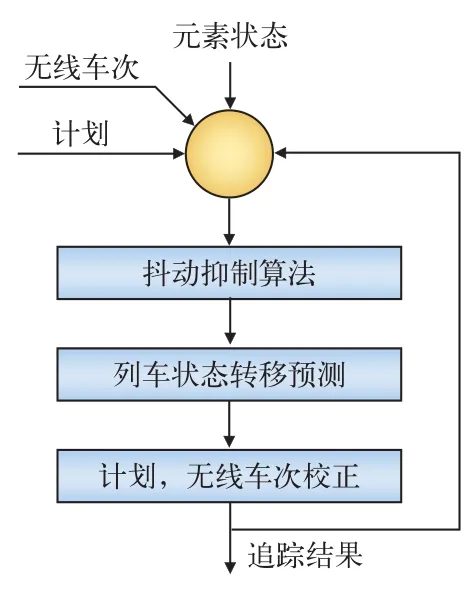
图3 追踪模型
模型的输入信息为车站的元素状态,计划信息和无线车次号信息。元素的状态信息和已建立的元素间的邻接关系是推算列车位置的基础,在对元素的状态进行抖动滤波后,结合系统上一次的运算结果,查询列车的状态转移表,对列车的状态进行预测运算,运算结果结合计划和无线车次号信息进行校正,校正后的结果作为下一次预测的基础和最终的结果输出。
4 结束语
本文在对车次追踪问题分析的基础上,基于有限自动机模型理论,提出了元素抖动抑制算法,建立了具有容错性质的车次追踪模型,该模型具有高可靠性,高灵活性,并能有效提高车次追踪系统的可靠性,对改善调度集中系统的车次号正确性具有重要意义。
[1]王建英. 铁路行车调度指挥仿真系统[J]. 中国铁道科学,2007(5):110-116.
[2]王建英. 分散自律调度集中系统中车次追踪算法的研究[J]. 铁路计算机应用, 2007,16(9):45-48.
[3]John E.Hopcroft. 自动机理论、语言和计算导论[M]. 孙家骕 ,译.北京:机械工业出版社, 2008.
猜你喜欢
铁路通信信号工程技术(2022年6期)2022-06-27
计算机工程与科学(2022年2期)2022-03-22
数学物理学报(2021年3期)2021-07-19
智慧少年·故事叮当(2021年4期)2021-05-06
铁道运营技术(2020年4期)2020-10-13
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
西北大学学报(自然科学版)(2018年2期)2018-04-18
领导决策信息(2017年17期)2017-06-21
