关节臂式柔性坐标测量机测量空间分析
2013-12-10 14:07合肥工业大学
电子世界 2013年4期
合肥工业大学 柯 龙
传统的笛卡尔式正交坐标测量机[1]由于体积大、结构复杂、造价昂贵,而且受相互垂直的导轨和安装环境的限制,因此有量程小、不易实现在线测量等缺点,不能满足很多场合的应用要求。随着柔性化和在线测量等要求的不断提出,新型非笛卡尔式的柔性关节臂式坐标测量机以其便携、灵活、造价低、量程大的特点发展迅速,应用也愈发广泛,测量精度也越来越高,适宜于工业现场的使用。
1.测量机结构
关节臂式柔性坐标测量机的结构设计模仿了工业机器人手臂的构造,如图1所示,测量机由基座、3根测量臂、6个转动关节和一个接触式测头组成,6个转动关节处安有圆光栅角度传感器,前端的测头通过接触被测工件触发信号,此信号被反馈给计算机处理系统,再结合各个旋转关节处圆光栅读取的关节转动角度值,通过程序的运算,得到被测量点处的坐标值(如图1所示)。
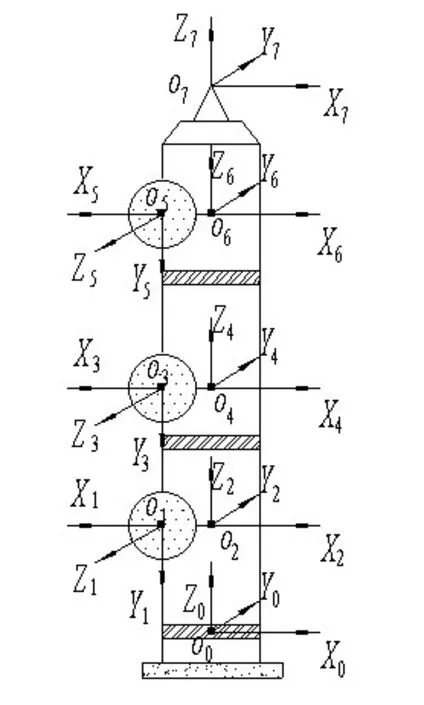
图1 被测量点处的坐标值
2.测量机数学模型
由关节臂式柔性坐标测量机的结构形式不难看出,其结构类似于工业生产中的机器人手臂,因此关节臂式坐标测量机的模型建立也可以参照工业机器人的建模方法。Denavit和Hartenberg[2,3]在1955年提出了两个相互连接且相对运动的构件之间相互关系的分析方法,D-H方法是在两个相互连接且相互运动的杆件上各自固定一个坐标系,然后用一个4×4的齐次变换矩阵即D-H矩阵来描述相邻两连杆的空间关系。通过依次变换可最终推导出末端点位置相对于基座坐标系的位置,从而建立坐标测量机系统的数学模型。利用齐次变换矩阵我们可以表示为T07=T01T12T23T34T45T56T67,模型参数包含有杆件的长度li、杆件的扭角iα、关节变量iθ和杆件i的偏置量di(i=1,2,…,6)。其测量模型,如式(1)所示。

3.测量空间分析
柔性关节臂式坐标测量机的测量空间我们可以定义为测量机处于正常工作状态下,末端测头所能测量到的空间中所有点位置的集合。在理想状态下,测量机的测量空间应为一实心球体,并且测头能够探测到空间内的任意一点。但是在实际情况当中,由于受到测量机结构的影响,除去基座位置因为固定不动而不能测量到以外,测量机的测量空间有可能会出现测量“死角”,如图情况下所示的“空腔”位置,也就是测量机测头无法探测到的区域。当测头长度l,杆件偏置d3,d5杆长l4满足时会出现如图2(a)所示的空腔,该测量空腔球径为,而当d3≤d5-时,坐标测量机会出现图2(b)所示的空腔情况,此时的球径,由上述关系我们可知,要想不出现如图所示的空腔,必须满足即
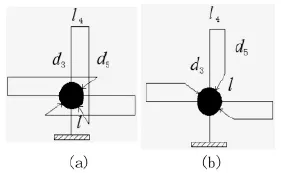
图2

图3 抽样的点的集合
4.测量机测量空间
对于前面关节臂式柔性坐标测量机测量空间中存在测量“死角”的问题,我们可以通过寻找坐标测量机的测量空间来进行验证。我们借鉴工业机器人工作空间[4]的分析方法。机器人工作空间的分析方法主要有:几何法、解析法及数值法。针对我们坐标测量机的机械结构及测量模型,我们选择数值法当中的蒙特卡洛法[5-7](Monte Carlo),它是一种采用随机抽样来解决数学问题的数值方法,广泛用于物理模型的建立、金融工程学、生物医学、空气动力学、宏观经济学等。通常利用蒙特卡洛方法处理问题的步骤如下:
(1)描述并确定数学问题的概率模型;
(2)在随机样本中进行随机抽样;
(3)将样本代入到模型当中进行统计估计。
我们坐标测量机的测量空间可以表示为如下的形式:

上式中,S表示空间中点的集合,P为末端测头处点位置坐标,f为坐标测量机测量模型,θi为广义关节变量,Q为关节变量取值范围,R3表示三维空间。测量机模型前面已经给出即坐标测量机测量模型,广义关节变量即我们的随机抽样样本需要通过随机数的产生来获得。
首先我们利用RAND函数来产生均匀分布的[0,M]随机数即我们进行抽样分析的随机样本,我们取M=106,使×RAND÷M,其中θ分别为关节变量的最大、最小值。这里我们取十万组随机样本即十万个形态位姿,将这些随机样本代入式(1)中的模型,我们便可以得到各个测头点位置处的坐标(xi,yi,zi)。
利用软件进行模拟仿真,我们可以得到所抽样的点的集合,如图3所示,即为关节臂式坐标测量机的测量空间,所取样本数越多,测量空间就越精确。从图上我们可以看到该测量空间为一完整的曲面球体,并没有出现前面所讨论的存在测量“死角”的情况,也反映了我们坐标测量机结构参数设计的合理性。
5.结论
本文阐述了关节臂式坐标测量机的结构与数学模型,并基于结构讨论了测量机测量空间中测量“死角”的情况,采用了蒙特卡洛理论对测量空间进行了分析与软件仿真,验证了我们坐标测量机测量空间当中并无测量“死角”的存在,证明了我们坐标测量机结构设计的合理性。为我们今后找寻坐标测量机的空间误差分布规律与最佳测量区域奠定了理论基础并提供了帮助。

表1 柔性坐标测量机的结构参数
[1]张国雄.三坐标测量机[M].天津:天津大学出版社,1999:1-3.
[2]于连栋,程文涛,费业泰.基于激光跟踪仪的关节式坐标测量机参数标定[J].中国科学技术大学学报,2009,39(12):1329-1332.
[3]汪平平.柔性坐标测量机精度理论及应用技术研究[D].合肥:合肥工业大学,2006.
[4]王兴海,周迢.机器人工作空间的数值计算[J].机器人,1988,2(1):50-53.
[5]Rastegar J,FardaneshB.Manipulator workspace analysis using the Monte Carlo method[J].Mechanism & Machine Theory,1990,25(2):233-239.
[6]曹毅,王树新,李群智.基于随机概率的机器人工作空间及其解析表达[J].组合机床与自动化加工技术,2005(2):1-6.
[7]张孝泽.蒙特卡罗方法在统计物理中的应用[M].河南:河南科学技术出版社,1991.
猜你喜欢
东北农业大学学报(2022年11期)2022-12-27
内燃机与配件(2022年2期)2022-01-17
四川建筑(2021年1期)2021-03-31
装备制造技术(2020年11期)2021-01-26
建筑机械化(2020年7期)2020-08-15
制造技术与机床(2019年6期)2019-06-25
发明与创新·中学生(2017年1期)2017-01-20
中国设备工程(2017年10期)2017-01-20
光学精密工程(2016年3期)2016-11-07
科技创新与品牌(2016年8期)2016-09-29