单手柄差动控制系统在四绳抓斗吊车中的应用
2014-01-01 02:57马涛
铜业工程 2014年1期
马 涛
(江西铜业集团公司贵溪冶炼厂,江西贵溪 335424)
1 引言
贵溪冶炼厂备料车间3#精矿库抓斗吊车支持机构与开闭机构采用的是单手柄差动开关控制系统[1],差动开关不仅可使抓斗实现开斗快、慢速上升和下降,闭斗快、慢速上升和下降,抓斗各极限位置自动停车,还可自动实现“沉抓”。单手柄操纵杆在固定导槽中运动,司机可以准确地控制抓斗的各种工况。通过控制线路中的转换开关,可方便地单独控制支持机构电动机和开闭机构电动机,为快速、安全地更换钢丝绳创造了条件[2]。
2 差动控制系统简介
2.1 差动控制系统组成
四绳抓斗差动控制系统,是专门用于四绳抓斗5t-20t桥抓、门抓、装卸桥中控制支持和开闭电动机工作的一套电气与机械配合动作的半自动化装置。系统由差动开关、辅助减速装置、带H导槽的单手柄联动控制台、控制柜、电阻器、换绳装置六大部件组成。
2.2 采用差动控制系统的目的
四绳抓斗起重机采用单手柄差动开关控制系统,其目的是使没有直接连接的开闭机构卷筒和支持机构卷筒的驱动可进一步简化。不像应用两个单独的主令控制器,分别控制抓斗开闭机构电动机和支持机构电动机,要依赖司机的熟练程度进行动作。本控制系统尽最大可能使加在这两个机构上的电动机的载荷均衡,特别在抓斗沉抓完毕起升瞬间前,一定使支持绳是拉紧的,实现两个电动机同时工作,能避免抓斗开闭机构电动机过载或烧毁。并防止抓斗开斗下降时闭合绳松弛,使闭合绳从滑轮组中跳出,导致闭合绳缠在滑轮轴上,使闭合绳加快磨损,降低使用寿命。
另外双主令控制器由单手柄操纵,而且单手柄在一个H型固定导槽中运动,防止司机误操作,从而也大大减轻了司机的劳动强度。而且可实现抓斗张开和闭合结束后都能自动切断相应的控制电路,且有上、下限位位置的控制断电能力。
3 差动控制系统与原控制系统的优缺点比较
3.1 原控制系统的缺点
(1)由于支持机构、开闭机构是独立控制的,司机的熟练程度决定抓斗在动作时的协调性,所以司机劳动强度大[3],易疲劳,导致产生事故;
(2)在完成物料抓起、起升的瞬间,由于司机疏忽开闭机构单独受力,电动机容易过载,从而导致烧毁[4];
(3)抓斗打开和闭合无极限位置,钢丝绳容易跑槽,跳出滑轮组,再次动作时,磨损钢丝绳,缩短使用寿命。
(4)抓斗更换钢丝绳时,操作人员和钳工维修人员协调困难,极易出现工伤事故;
(5)下降极限位置不易控制,易过限位行程,导致动作反向。抓斗开斗下降时速度很快,易与料堆或铁路钢轨强烈碰撞,从而损坏抓斗和钢轨;
(6)为实现合适的抓斗工况,司机经常点动操作或打回车,电器元件或电动机经常处于疲劳状态,降低了元件的使用寿命。
3.2 差动控制系统的特点
(1)抓斗可在任何高度由单手柄操纵杆操纵抓斗的张开和闭合,且会使抓斗张开和闭合完毕后,自动使电动机断电;
(2)当抓斗升到调整时确定的最高位置,或下降到调整时予置的最低位置时,使系统自动断电;
(3)当抓斗开斗下降到料堆上时,单手柄操纵杆从开斗下降经过零位放到“起升2”位置时,抓斗能自动实现“沉抓”,抓斗的满斗率大大提高,当“沉抓”结束后自动提升,从而使生产率显著提高;
(4)单手柄操纵杆在固定导槽中运动,因此司机控制抓斗工作状态,准确无误,大大减轻司机的劳动强度,避免了误操作;
(5)由于差动开关的控制,支持机构和开闭机构起升时同步运行,避免开闭电动机单独工作,防止开闭电动机过载或烧毁;
(6)由于差动开关有防松绳措施从而避免闭合绳从滑轮组中跳出;
(7)防止闭合绳单独受力,延长闭合绳使用寿命;
(8)控制系统有工作位置和调整位置,工作可靠,调整方便;
(9)该系统设有慢速挡,当抓斗张开快速下降距料堆1米左右,将操纵杆放到开斗慢降,防止抓斗和物料强烈冲撞,延长抓斗使用寿命;
(10)本系统全部机构可在司机室内操纵,如需检修时,将工作状态转换到调整位置,司机可小车上用专用换绳装置进行操作,使更换钢丝绳安全、方便、快速。这是该控制系统最大突出特点;
3.3 差动控制系统的缺点
(1)差动开关精度要求较高,同时还要改造卷筒出轴,安装、调试费用较高;
(2)在沉抓条件下,由于支持、开闭两机构的滑轮比不同,差动开关也难以反映闭斗的准确位置,同时在运行中制动器的松紧会使差动开关积累误差。所以差动开关的动作位置需要经常调整,增加专业技术人员的负担;
(3)由于控制系统中,使用的中间继电器增加,故障点相应增加。
4 差动开关的控制原理
差动控制系统的原理见图1,开关结构示意图见图2。

图1 开关控制系统原理图
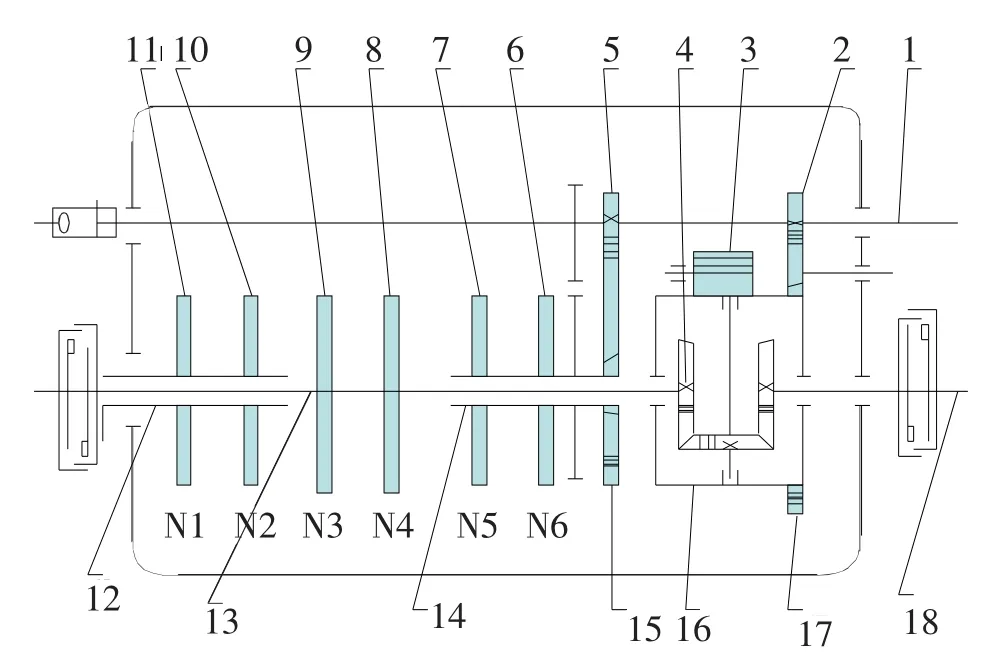
图2 开关结构示意图
4.1 机械部分
(1)抓斗在起升过程中差动开关的支持轴和闭合轴需同步。此时空心轴12、13不动,空心轴14一转速比4∶1转动[6],即轴1每转4转相当于轴14转1转,支持轴上的主动齿轮5的齿数C1为24,空心轴14上的被动齿轮15的齿数C2为96,其传动比为:

(2)受开关的结构限制,在抓斗起升的全过程中,支持轴1和开闭轴18的最大有效工作转数为3转,对空心轴14的有效工作转数只能是3/4转(约270度)(即抓斗打开到抓斗闭合)。
4.2 电气部分
(1)差动开关的凸轮和接触组的排列以及内部接线见图3,此图中表示的是抓斗闭合并在最高位置时差动开关的工作状态。

图3 差动开关凸轮角及其内部接线
(2)差动开关内凸轮及接触组的作用见表1。
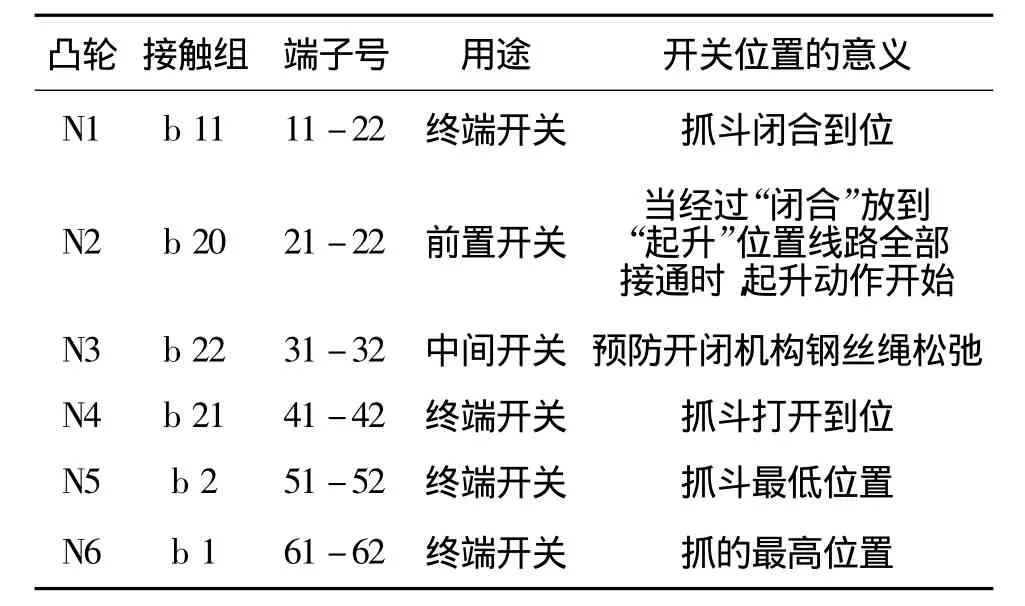
表1 凸轮片的作用及控制
4.3 差动开关的调试步骤[5]
差动开关的调试步骤见表2。
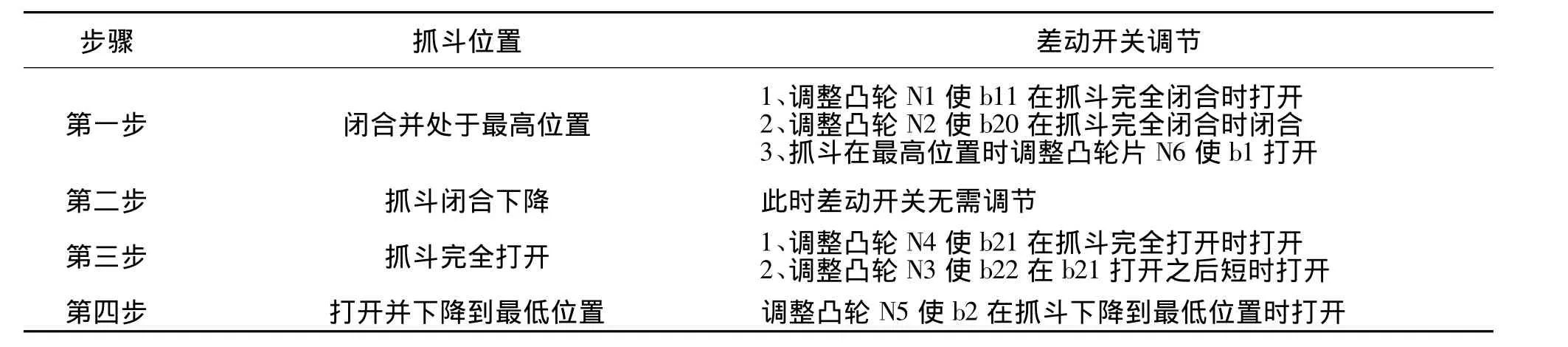
表2 开关调试步骤
5 抓斗工况的控制
采用差动开关后,由于增加了转子回路电阻,使电动机可以工作在正、反向电动状态和反接制动状态,利用附加电阻可以调整支持绳在沉抓时不致太松[6]。
电动机的机械特性见图4。
5.1 抓斗的慢档控制
(1)在单手柄差动控制系统中,在支持机构和开闭机构上增加了慢档动作,这样可以更好的控制抓斗的行程,使抓斗准确、无误的完成各工况动作。

图4 电动机的机械特(机械效率n=0.8)
抓斗在打开慢速下降时,要注意支持和闭合卷筒的制动器应打开,而且不允许有滑动现象。开闭电动机在这种工作方式时被断电,而它的制动器被打开,因此通过抓斗的自身重量往下拉的作用,使闭合绳往下运动,如果摩擦阻力较大,闭合绳往下运动的行程短,抓斗可能闭合,在这种情况接触组b21闭合,这时开闭电动机用全部电阻在下降方向接通,阻止抓斗闭合。b21重新打开,使闭合卷筒和支持卷筒转速一致。假如在b21打开,开闭电动机转速比支持电动机的转速高,例如从“下降快档”转到“下降慢档”时打开抓斗行程闭合钢丝绳松绳,在这种情况下b22打开,使闭合卷筒制动。
要注意的是,b22必须必b21晚些打开,正常情况下b22总是闭合的,只有闭合绳松绳时才被打开。
(2)抓斗在闭合慢速下降时,当转子接触器接通时,开闭电动机的电阻值必须和支持电动机的电阻值相等。也就是转子加速接触器K442和K441所连接的电阻相同。在这一级工作时满斗大约以30%的额定速度下降。抓斗抓取物料较少时相应下降速度要小些。
5.2 抓斗的沉抓和自动上升
抓斗的沉抓和自动上升是抓斗闭合慢速上升和闭合快速上升的连续动作,所以要充分了解这两个动作的机理。这两种动作时电动机工作状态如下:
在沉抓时期,支持机构定子接触器K11接通,使电动机正向接通[6]。支持机构转子串有全部电阻即工作电阻和附加电阻(如图5),这时电动机的特性变得相当软(如图4电动机的机械特性曲线中的第1条曲线)。由此可知,这时支持电机处于深度反接状态,而抓斗又落在物料上,受抓斗及钢丝绳自重,即可将电动机往抓斗下沉方向旋转,这时支持绳是松弛的。此时差动开关的工作状态:b11、b1、b2闭合,b20断开,而b21、b22在开斗下降到物料堆时应是断开的,抓斗闭合时是闭合的。
自动提升时期,抓斗即将闭合时,差动开关b20闭合,此时支持电动机由原来处于深度反接转变为正向电机状态,切除全部电阻(见图6),并与开闭机构同步上升,避免了闭合绳单独上升的问题。差动开关的调整应使b20在b11打开之前闭合,至于它们的关系要看物料的情况而定。
5.3 更换钢丝绳
在换绳的时候,为了防止差动开关的内凸轮片变化,在控制回路中有一转换开关可选择工作状态或换绳状态,此外还设有一个手动控制按钮盒,供抓斗穿钢丝绳使用,可以单独动作支持机构或开闭机构。换绳时需注意以下事项:
(1)司机应将抓斗放至平整的地面上,应使两个机构的钢丝绳长度一致;
(2)将差动开关和附加减速器相连的联轴器脱开,再利用按钮盒放掉所要更换的钢丝绳;
(3)用按钮盒穿好钢丝绳,并调整到更换前的姿势(绳的长度一致的姿势);
(4)连接上脱开的差动开关的联轴器,此时即可用联动台工作;
(5)如有少许出入可用差动开关的微调进行调试,不用每次都打开差动开关的端盖。
6 结语
四绳抓斗采用差动控制装置后,通过操作人员的配合,可完全实现自动控制,解决了起升瞬间支持绳不出力的缺陷,避免烧毁开闭电动机,且操作简便,可降低操作人员劳动强度,提高生产力,增加社会效益与经济效益。
[1]金国钜.四绳抓斗单手柄操作的控制操作[P].中国专利:94247361,1995.
[2]大连起重机械厂.四绳抓斗单手柄操作带差动开关的控制系统[P].中国专利:92100762,1993.
[3]郑盛果.桥式起重机抓斗控制系统的改进[J].广西蔗糖,2004(2):22-24.
[4]刘建立.单手柄控制在桥式起重机中的应用[J].今日科苑,2007(20):56-57.
[5]大连起重电控设备厂.四绳抓斗单手柄操作带有差动开关的控制系统调试大纲[Z].1991.
[6]曲而刚,王健明.四绳抓斗差动控制系统[J].起重运输机械,1993(3):16-21.
猜你喜欢
中国修船(2022年2期)2022-04-28
装备制造技术(2020年11期)2021-01-26
重型机械(2020年2期)2020-07-24
电子制作(2019年10期)2019-06-17
船舶与海洋工程(2018年5期)2018-11-14
电子制作(2018年14期)2018-08-21
电子制作(2018年11期)2018-08-04
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
科普童话·百科探秘(2015年5期)2015-05-26