塔吊远程上锁及控制系统研究开发
2014-01-16 05:56陈文林王龙晓郝丽娜
电子设计工程 2014年6期
陈文林,王龙晓,安 震,郝丽娜
(1.东北大学 资源与土木工程学院,辽宁 沈阳 110004;2.东北大学 机械工程与自动化学院,辽宁 沈阳 110004)
据建设部统计资料,2012年上半年,全国共曝光了52起塔机事故,52起塔机事故中死亡45人,57受伤人[1]。根据近年来塔吊事故统计情况,主要有以下几种问题:第一、塔吊的长时间使用导致其疲劳损坏。操作人员违规吊运超过最大安全载荷的重物,造成塔吊横臂梁掉落、塔身断裂等事故;第二、操作人员出现失误而造成重物从吊钩坠落;第三、塔吊在工作过程中与周围相近的建筑物或其他设施碰撞,或者有塔吊群一起工作时互相造成碰撞;第四、在恶劣天气下(如大风、暴雨等天气)为了赶工期而继续施工导致翻塔、塔身折断或者塔吊与建筑物以及其他塔吊碰撞等事故。
由于国家对建筑行业安全的重视度越来越高,相应的塔吊监控系统在国内的发展速度也越来越快。2010年,黑龙江的戚本志等人设计了实现建筑塔吊单机运行和群塔干涉作业防碰撞的实时监控与声光报警系统[2],提高了塔吊在工作过程运行的安全性。2008年西安的彭万仓等人设计了一款基于编码技术的塔吊防碰撞系统[3]。2011年中北大学开发了一套塔吊悬臂角度无线监测系统,有效地解决了塔臂在运行过程中角度状态的实时监测。2008年Shapira A,Rosenfeld Y,Mizrahi I设计了一套基于视觉监控系统的塔式起重机,解决了塔吊操作者的视觉死角,开阔了操作者的视野[4]。欧美地区塔吊制造技术比较先进,多数欧美塔吊制造商所制造的塔式起重机均自带塔吊运行监测系统,所以单独针对塔吊监控系统的而建立的公司数量较少。单独的塔吊监控技术是近几年发展起来的,采用了许多先进的技术,如利勃海尔、波坦、特雷克斯、WOLFFKRAN、JASO、MORROW、GEDA 等欧美知名品牌企业所生产的塔吊。这些塔吊制造商运用多种新技术,比如德国企业制造的塔吊采用微波传感定位技术防止塔吊碰撞;英国企业制造的塔吊将先进近场感应技术加入监控系统等。其中国外最为著名的SMIE公司推出最新一代的AC30塔吊防撞系统,该系统能够阻止塔吊设备在特定的区域运行,这些特定的区域包括医院、电力设备、学校、广场等公共区域。
本文设计的远程塔吊远程上锁及控制系统,能够对塔吊进行远程上锁,避免施工方在恶劣的天气环境下违章作业,同时基于GPRS的无线传输模块能够实现对塔吊的远程控制,防碰撞检测系统可以及时的检测到障碍物,防止塔吊与塔吊以及塔吊吊篮与建筑物等其他物体的碰撞。提高了塔吊操作的安全性,能够避免塔吊操作不当以及恶劣气候下违章操作等带来的安全事故。
1 总体设计
嵌入式系统与无线通信技术相结合的应用模式是当今电子科技发展的主流,本文研究利用PC机、GPRS无线通信模块以及单片机的塔吊远程上锁及控制方案。该系统远程上位机采用VB语言来编写监控中心软件,并通过PC运行。下位机包括GPRS模块和单片机,两者之间由RS-232接口进行连接。PC端监控中心通过Internet网络-GPRS网络对下位机发送指令和获取从下位机发回的信息。下位机获取命令后由单片机控制执行机构对塔吊进行上锁和控制。本系统的设计总体路线图如图1所示。
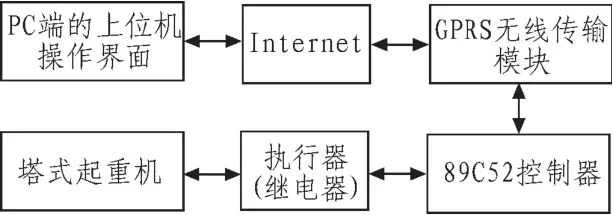
图1 本系统设计整体路线图Fig.1 The route of system design
2 系统硬件设计
本系统的硬件主要指远端执行系统的硬件,主要由GPRS无线收发模块、89C51单片机控制模块、继电器执行机构、串口通信模块。GPRS无线模块、单片机以及单片机控制的执行机构构成,无线模块和单片机由RS-232相连。GPRS无线模块通过GPRS无线网络获得命令后,通过RS-232及时地传输给单片机,单片机得到命令后并分析,最后根据命令通过继电器对塔吊进行相应的动作控制。本系统的硬件电路结构图如图2所示。
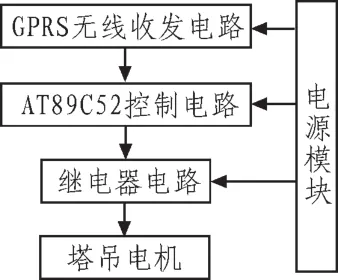
图2 系统主要电路结构图Fig.2 The main circuit structure diagram
GPRS无线模块[5-6],本设计采用的是北京振鸿伟业公司所生产的GPRSDTU,内置SIMCom公司生产的SIM900无线模块。SIM900完全采用SMT封装形式,同时采用了功能强大的ARM926EJ-S芯片处理器。GPRSDTU集成了标准的RS-232接口以及SIM卡接口,可以在PC机上用AT命令通过串口对其进行设置和调试。它不同于普通的GPRS模块,它是一种实现RS-232/485与TCP/UDP/IP协议透明转换的嵌入式设备,能够满足用户对数据进行无线传输业务的需求。可以方便地为远程数据通讯提供无线接口,可以实现将嵌入式系统直接与Internet相连,实现网络的互连互通。适用于工业控制中的数据实时传输、工业抄表以及远程测控等[7]。
本设计控制器采用AT89C52单片机[8],通过串口,实现与GPRS模块的通信,完成对PC机的指令接收,实现对塔吊的上锁和控制。单片机和GPRS无线通信模块之间、在PC端调试单片机时以及利用PC机对GPRS无线通信模块调试时,均采用标准的RS-232接口来实现通信传输。由于RS-232电平和单片机TTL电平并不相同,在RS-232信号的传输过程中是用-3~-15 V表示1,+3~+15 V表示0,而在PCB板上TTL电平一般以5 V表示1,0 V表示0。这样以来就必须在单片机和PC之间加上电平转换芯片。SP3232芯片可以良好的使得电平进行高低转换。
3 系统软件设计
信息技术的不断发展,使得各个领域对计算机的网络化的依赖性变的更大,计算机网络在各个应用领域地位变得不可取代,建立在TCP/IP协议[9-10]技术基础之上的网络互联也发展的很快。然而TCP/IP协议的开发编程比较复杂,Visual Basic 6.0提供了基于Windows Sockets网络编程接口的Winsock控件,它使开发通讯程序变得简单方便。本上位机软件设计流程图如图3所示,打开上位机界面首先进入的是用户验证界面,输入账号和密码进行验证,如果密码连续三次输入错误就会自动退出软件,密码正确就会进入控制界面,用户在控制界面可以对塔吊进行远程上锁、解锁和控制,控制指令通过互联网发送。
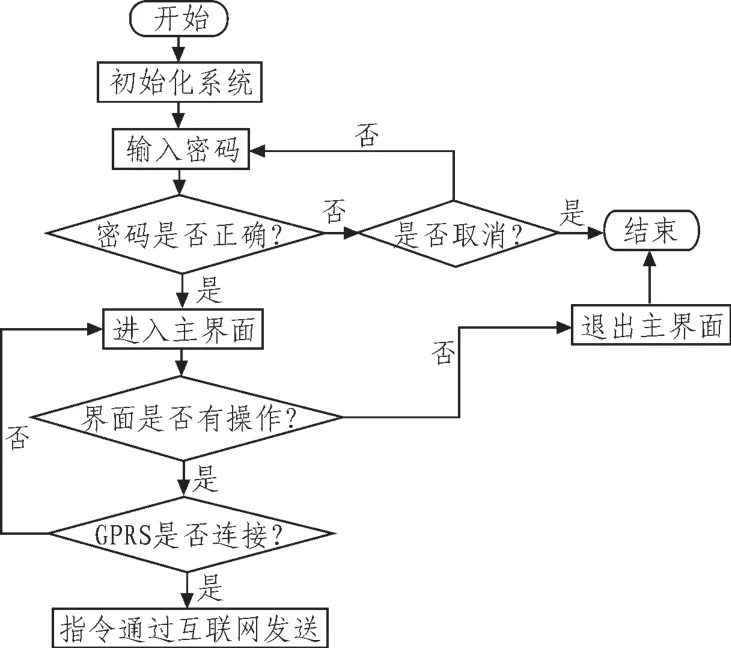
图3 上位机系统软件设计流程图Fig.3 Host computer software design flowchart
监控系统上位机PC端是整个塔吊远程上锁及控制系统的操作中心。它肩负着跟远程塔吊使用现场中的控制终端进行通信,通过对获取的和本地的数据进行处理,并对远程控制终端发送相关上锁及控制指令。监控中心的主要功能介绍如下:
1)查看功能:监控中心利用VB ADO控件与数据库连接,可查看到各个设备的具体参数,如设备ID号,SIM手机卡号,端口号以及是否上锁等状态。
2)连接与断开功能:点击操作界面上的连接设备或者断开连接,可以相应地连接或断开所选择的设备。
3)控制功能:对整个控制中心监控的所有塔吊设备进行上锁或者解锁。通过点击上锁或者解锁,将控制命令下发给远程监控终端,让远程监控终端在指定的方案中运行。
4)存储数据功能:存储运行过程中产生的信息放到本地数据库当中,以便于针对具体目的塔吊进行控制。
5)安全性:为了监控中心操作的安全,登陆监控中心必须验证用户名和密码,防止对监控中心进行人为的非法操作。
6)模拟功能:对塔吊和建筑物的相对位置进行模拟,使用户能方便直观的看到现场塔吊和建筑物的相对位置。
4 实验应用
对所设计的上位机软件进行实际操作测试,验证系统是否可靠,具体操作步骤如下:
1)登陆界面:监控中心为了安全管理,对所有用户操作人员都要进行相应权限验证,并设置相应的登录密码,登录密码界面如图4所示。

图4 系统登陆界面Fig.4 The interface of logining on the system
2)主操作界面:监控中心的主操作界面如图5所示,在设备情况一栏中以图表的形式显示监控中心所监控所有设备的主要信息,并实时查看塔吊的上锁以及解锁状态;在连接设备一栏中,可对图表中所选中的设备进行连接或者断开连接;上锁控制一栏中,对选取的设备进行相应的锁定或者解锁控制;运动控制一栏中,可对图表中选中的设备进行相应的控制,如横梁顺时针或者逆时针旋转,塔吊小车拉近或者远离等操作。
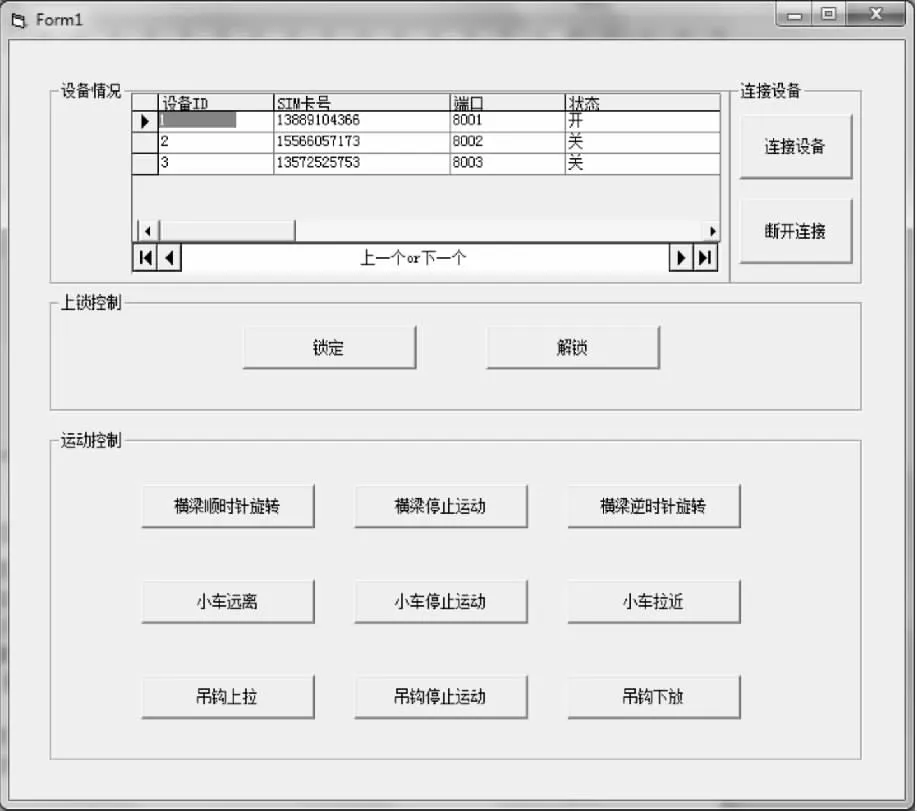
图5 操作界面Fig.5 Operation interface
3)模拟界面:在对塔吊进行现场安装时记录下塔吊的位置,并对建筑物的最大障碍尺寸进行测量。最大障碍尺寸即设想出采用一个立方体,这个立方体能够正好完全地容纳所要进行施工的建筑物。根据现场情况建立如图所示的坐标系,原点(0,0)点为现场左上角点,以此点开始往右为X轴正向,往下为Y轴正向,建筑物和塔吊均包含在此坐标系内。
①建筑物轮廓模拟:如图所示,在各点坐标参数一栏输入“第一点位置坐标”和“第三点位置坐标”,点击“位置预览”按钮即可看见如图6所示的建筑物的最大方形轮廓。
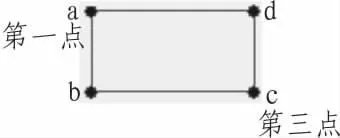
图6 位置预览例图Fig.6 Location preview case diagram
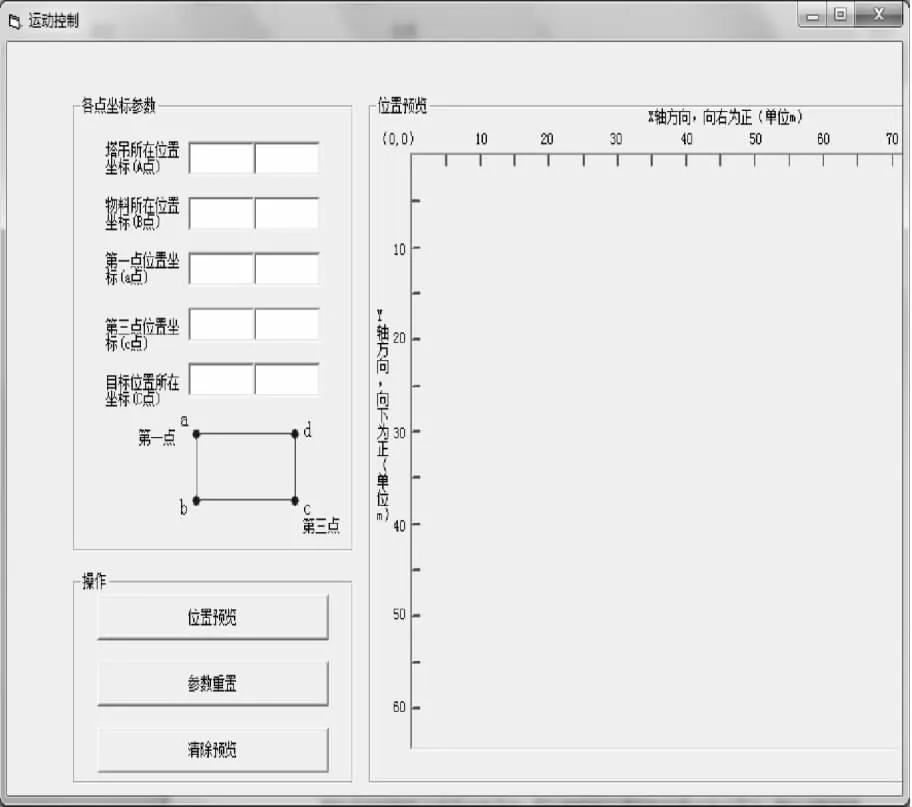
图7 位置预览前界面示意图Fig.7 Before previewing the location schematic diagram
例如在各点坐标参数内输入相应的坐标值(举例说明),点击“位置预览”可得到以下结果,图8右半部分的阴影即为建筑物最大障碍尺寸,图中的斜线表示塔吊初始位置。位置预览示意图如图8所示。
经过实验测试,通过本系统可以稳定的实现对塔吊上锁和远程控制,验证本系统运行可靠。
5 结 论
本文针对当前我国的塔吊使用现状以及利用现有的网络资源(GPRS无线网络和Internet网络),研究开发了能有效降低塔吊事故并方便塔吊租赁市场的塔吊远程上锁及控制系统。系统充分利用了现有的移动无线通信网络进行组网结构设计,实现了从塔吊工作现场到监控中心数据服务器之间的无线数据传输,很大程度上的降低了企业的运营成本。实现了数据传输、处理和发布的实时性、安全性和综合性,并建立了在时间和空间上无缝的塔吊上锁及控制的体系。
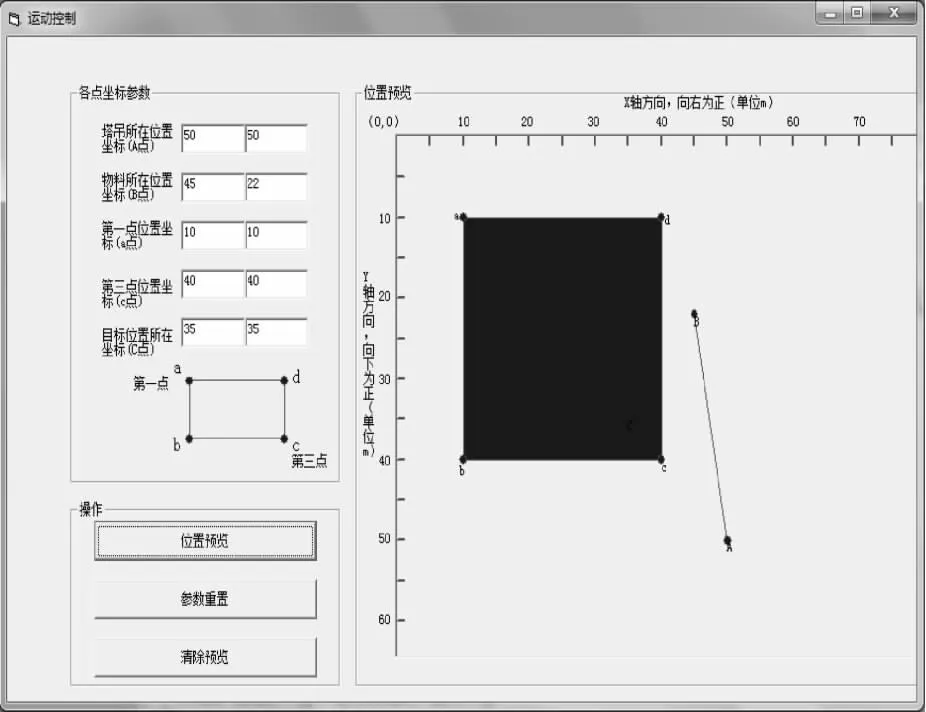
图8 位置预览示意图Fig.8 Previewing the location schematic diagram
[1]王秀丽.基于WinSock的网络应用程序的开发研究[J].消费电子,2012(10):77-77.WANG Xiu-li.The research and development of based on the WinSock network application[J].Consumer Electronics Magazine,2012(10):77-77.
[2]戚本志,焦春奇,戚莹.塔吊远程安全监控系统的研究与设计[J].价值工程,2010,242(2):242-243.QI Ben-zhi,JIAO Chun-qi,QI Ying.The research and design of tower crane remote security monitoring system[J].Value Engineering,2010,242(2):242-243.
[3]彭万仓,王水波,王金州.基于编码技术的塔吊防碰撞系统设计[J].计算机应用技术,2008.51(4):51-58.PENG Wan-cang,WANG Shui-bo,WANG Jin-zhou.The design of based on the coding technology of tower crane collision systemdesign[J].Computer Applications Technology,2008,51(4):51-58.
[4]Shapira A,Rosenfeld Y,Mizrahi I.基于视觉监控系统的塔式起重机[J].建筑工程管理,2008,134(5):320-332.Shapira A,Rosenfeld Y,Mizrahi I.Vision system for tower cranes[J].Constr.Eng.Manage.,2008.134(5):320-332.
[5]陈亚平.基于GPRS技术的城市路灯监控终端研制 [D].镇江:江苏大学,2010.
[6]罗超.单片机GPRS智能终端及远程工业监控技术研究[D].长沙:中南大学,2009.
[7]杨俊宇.面向制造单元的远程监控和诊断系统研究[D].南京:东南大学,2004.
[8]姜书政,王桂海.基于 AT89S52单片机的电机控制系统设计[J].现代电子技术,2010,33(7):138-140.JIANG Shu-zheng,WANG Gui-hai.The motorcontrolsyste mdesignbased on AT89S52[J].Modern Electronics Technique,2010,33(7):138-140.
[9]高永强,李翠莲.VB中基于TCP/IP协议的点对点文件传输[N].长治学院报,2012,29(5):34-38.
[10]周建军.了解 TCP/IP协议[N].电脑报,2000.
猜你喜欢
天津教育(2023年2期)2023-03-14
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
四川水泥(2020年8期)2020-08-06
当代工人(2019年19期)2019-11-22
工程与建设(2019年4期)2019-10-10
小学生学习指导(低年级)(2019年9期)2019-09-25
学生天地(2018年19期)2018-09-07