
航母运动对着舰引导雷达精度的影响
2014-02-07 02:55桑德一赵建军杨利斌
中国舰船研究 2014年6期
桑德一,赵建军,杨利斌
海军航空工程学院,山东烟台264001
0 引 言
舰载机着舰引导雷达是舰载机起飞和着舰引导系统的重要组成部分,它为航母舰载机的起飞和降落提供必要的监测与引导,是航母舰载机正常工作的重要保障。航母在海上航行时受海浪、海流和海风的影响,会产生六自由度的运动,即绕三坐标轴的旋转(横摇、纵摇、艏摇)和沿三坐标轴的平移(横荡、纵荡、垂荡)[1]。航母的这种六自由度运动会影响着舰引导雷达对舰载机的探测精度,严重时,还会造成舰载机着舰事故[2-3]。为排除航母运动给舰载机着舰带来的安全隐患,需要仔细计算和分析航母六自由度运动对着舰引导雷达精度的影响,建立海浪模型和航母运动模型以及必要的坐标系及其之间的坐标系转换关系,按照实际要求分别仿真计算航母横摇、纵摇、艏摇和沿轴平移运动对雷达探测精度的影响,并根据仿真结果进行详细分析。
1 建立坐标系并推导其转换关系
1.1 建立坐标系
在分析航母运动对雷达测量精度的影响时,需要用到惯性坐标系和附体坐标系,用这2 个坐标系之间差角的变化来表征航母姿态角的变化[4-5]。
1)惯性坐标系。
惯性坐标系的原点Ol定义为航母摇摆运动中心在甲板上的投影点,Xl轴平行于当地水平面指向东,Yl轴平行于当地水平面指向北,Zl轴垂直于Xl和Yl轴指向上,Xl轴、Yl轴和Zl轴组成右手坐标系,惯性坐标系固定于空间的某一点,不随航母的摇摆而改变各坐标轴的指向。此坐标系作为基准参考系。惯性坐标下的坐标用(xl,yl,zl)表示,具体如图1 所示。
2)附体坐标系。
附体坐标系原点Od位于航母摇摆运动中心在甲板上的投影点,Yd轴平行于航母艏艉线指向舰艏,Xd轴平行于航母甲板且垂直于Yd轴指向右舷,Zd轴垂直于甲板平面指向上组成右手直角坐标系。该坐标系随航母的摇摆运动而运动,与惯性坐标系之间的夹角即为航母的姿态角。该坐标系下的坐标用(xd,yd,zd)表示,具体如图1 所示。

图1 惯性坐标系和附体坐标系及其转换关系示意图Fig.1 Schematic of inertial coordinate system and body fitted coordinate system
1.2 坐标系之间的转换
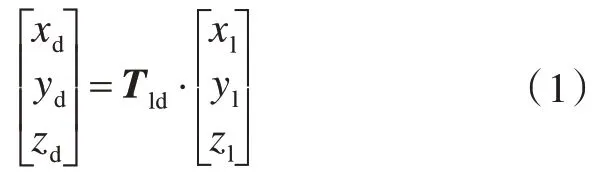
1)惯性坐标系转换到附体坐标系。
惯性坐标系和附体坐标系的原点重合,两者之间没有平移变换,只存在角度的旋转,而引起这种旋转的原因是航母的3 个姿态角,即横摇角r 、纵摇角p 和艏摇角y 。根据三维坐标系的变换关系,推导出惯性坐标系到附体坐标系的变换公式如式(1)所示:
其中,

2)附体坐标系转换到惯性坐标系。
根据矩阵求逆运算,容易得到附体坐标系到惯性坐标系的转换公式:
其中,

惯性坐标系和附体坐标系间的转换示意图如图1 所示。
2 航母的平移运动对雷达测量精度的影响分析
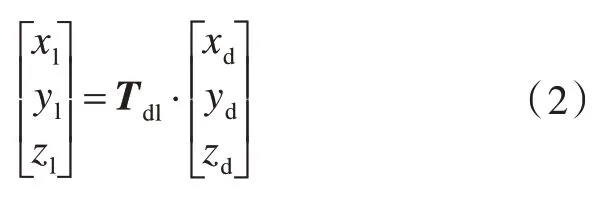
航母沿三坐标轴的平移运动中,沿Y 轴的平移运动不仅包含纵荡运动还包含航母的航行运动,所以对雷达的测量精度影响最大。下面,将以此为例分析航母的平移运动对雷达测量精度的影响。当目标位于舰艉后上方时,航母沿Y 轴的平移运动对雷达测量的距离和俯仰角的影响最大,而对方位角的影响为0。如图2 所示,目标M 为一固定目标,其空间位置不随时间改变。在t1时刻,目标的俯仰角和距离分别为E1和R1。在t2时刻,目标的俯仰角和距离分别为E2和R2。从t1时刻到t2时刻航母沿Y 轴的平移距离为d 。设目标的高度为h,t1时刻目标的水平距离为l,其中,d <<l,根据三角形三边关系,有

又因为d <<l,故d <<R1,所以R1≈R2。
由三角形相似原理可知Δh <<h,同时有
所以E1=E2。
由此可见,航母的平移运动对雷达的测量精度基本上没有影响。
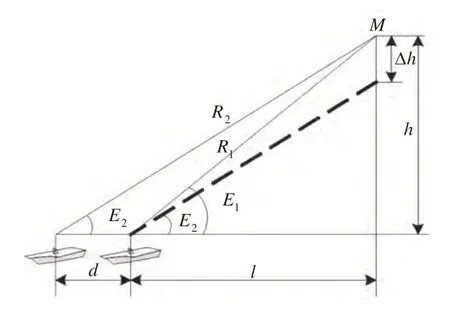
图2 航母沿轴运动对雷达测量精度的影响Fig.2 Carrier translation motion influence on radar measurement accuracy
3 航母摇摆运动对雷达测量精度的影响分析
3.1 距离误差ΔR
如图3 所示,目标M 与坐标原点O 的距离为R;在t1时刻,雷达天线中心位于A1点,目标到雷达的距离为R1;在t2时刻,雷达天线中心位于A2点,目标到雷达的距离为R2;A1与A2的距离为d 。由于航母摇摆运动的姿态角很小,故∠A1OA2很小,且雷达的天线中心与航母摇摆中心之间的空间距离OA1不大,所以d 很小,远小于R1,R2和R,因此,ΔR=R1-R2<d ≈0,即航母摇摆运动对雷达测量距离的影响很小。

图3 航母摇摆运动对雷达测量距离的影响示意图Fig.3 Carrier rocking motion influence on the radar distance measurement
3.2 角度误差
设航母姿态角为横摇角φ,纵摇角θ,艏摇角ψ,所以XdOdYd平面与XlOlYl不重合,设这两个平面之间的夹角为γ,则这两个平面的法向量OB和OC 之间的夹角也为γ,平面XdOdYd的法向量在平面XlOlYl上的投影OX 与Yl轴之间的夹角为Am。
如图4 所示,在惯性坐标系中取向量a=(0,0,1),显然该向量平行于zl轴,垂直于xlolyl平面,该向量经式(1)旋转后变为a′,

γ 即为a′与a 的夹角,于是有

整理后得

由图4 可以看出,角Am可以由向量a′的x 和y 坐标的比值求出。

整理后,得

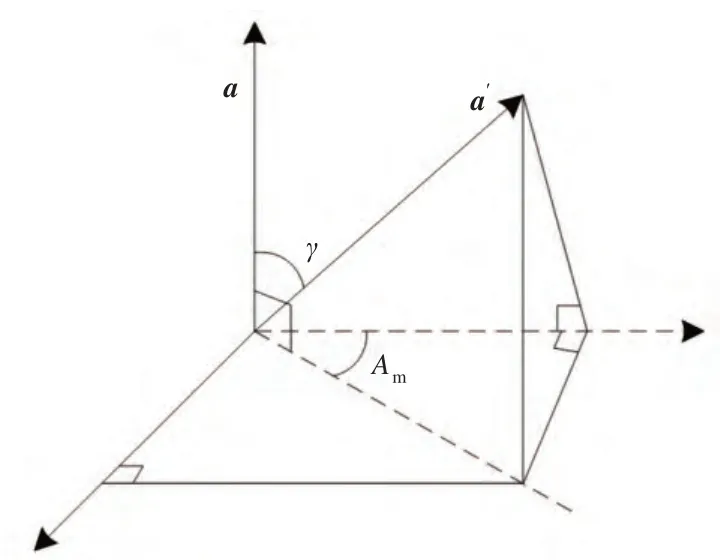
图4 由横摇角和纵摇角导致的方位角误差Fig.4 The azimuth error caused by the roll angle and pitch angle
如图5 所示,Yl轴是雷达天线转台的俯仰轴,Zl轴是雷达天线转台的方位轴。Yd和Zd是雷达天线转台由航母摇摆运动导致的倾斜后的俯仰轴和方位轴。方位轴转动时,俯仰轴在倾斜面上转动。
1)俯仰角误差ΔE 。
当俯仰轴转角为0°时,由于方位轴倾斜,所以电轴也在倾斜面上,电轴与水平面的夹角就是俯仰角误差。方位轴转动时,电轴也在倾斜面上转动,所以俯仰角误差会随方位角变化。当方位轴转到任意方位角A 时,电轴OT 在水平面上的投影为OD。在球面直角三角形XTD 中,有
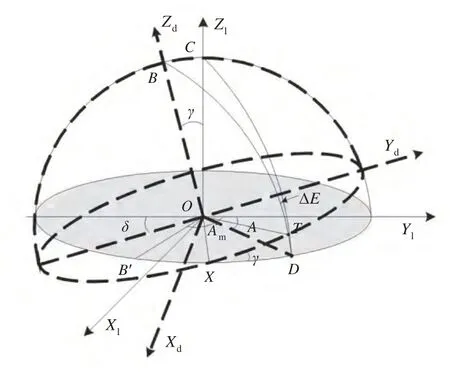
图5 航母姿态角对雷达测角精度的影响Fig.5 Carrier's attitude angle influence on radar measurement accuracy
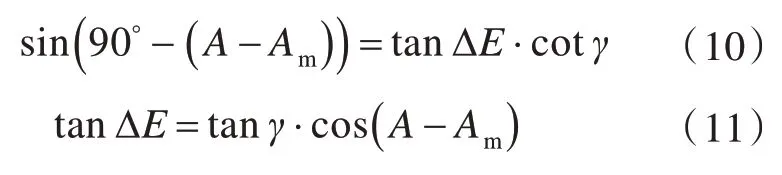
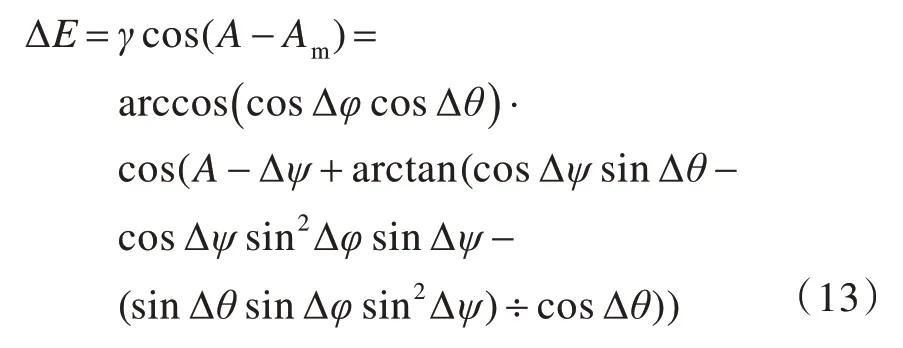
因γ 很小,tan γ ≈γ,tan ΔE ≈ΔE,于是

把式(7)和式(9)代入式(12),得
2)方位角误差ΔA。
因为俯仰轴与电轴垂直,故俯仰轴对水平面的倾角δ 的变化规律与俯仰角误差ΔE 的变化规律在相位上差90°,所以
由于俯仰轴非水平,故俯仰轴转动时引起的方位角误差

将式(15)代入式(16),得

把式(7)和式(9)代入式(17),得
4 航母运动对雷达精度影响仿真
根据舰载机起飞和着舰要求,航母的横摇、纵摇、艏摇、横荡、纵荡和垂荡运动需在一定的幅度范围和周期内[6-8],因此根据上述海浪模型和航母姿态模型进行仿真计算时,要满足以下条件[9-11]:航母的横摇角小于2°,横摇周期大于10 s;纵摇角小于1°,纵摇周期大于15 s;艏摇角小于1°,艏摇周期大于6 s;横荡幅度小于1.5 m,横荡周期大于15 s;纵荡幅度小于2 m,纵荡周期大于18 s;垂荡幅度小于2 m,垂荡周期大于20 s;配平角小于0.2°,倾侧角小于0.4°。根据舰载机的着舰规程,舰载机由航母后方进近下滑着舰,所以假定被测目标位于航母后方偏上的位置。
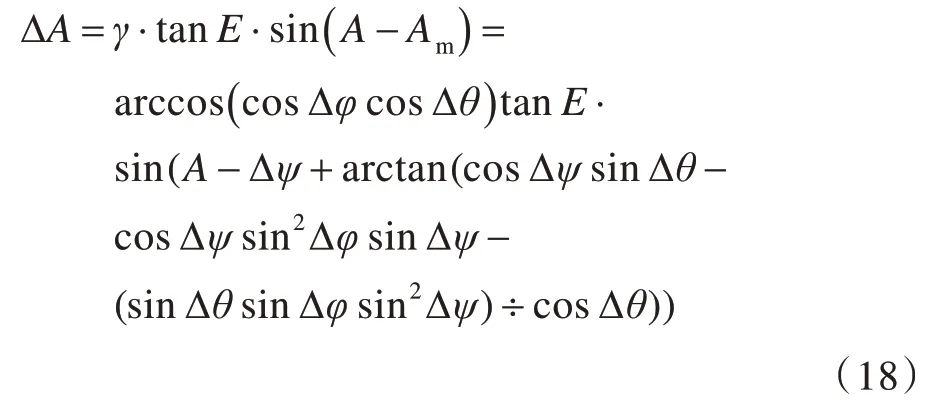
首先,根据航母的运动模型计算航母的六自由度运动曲线,如图6~图7 所示。由图6~图7 可以看出,航母的摇摆运动和沿轴平移运动具有很强的周期性。
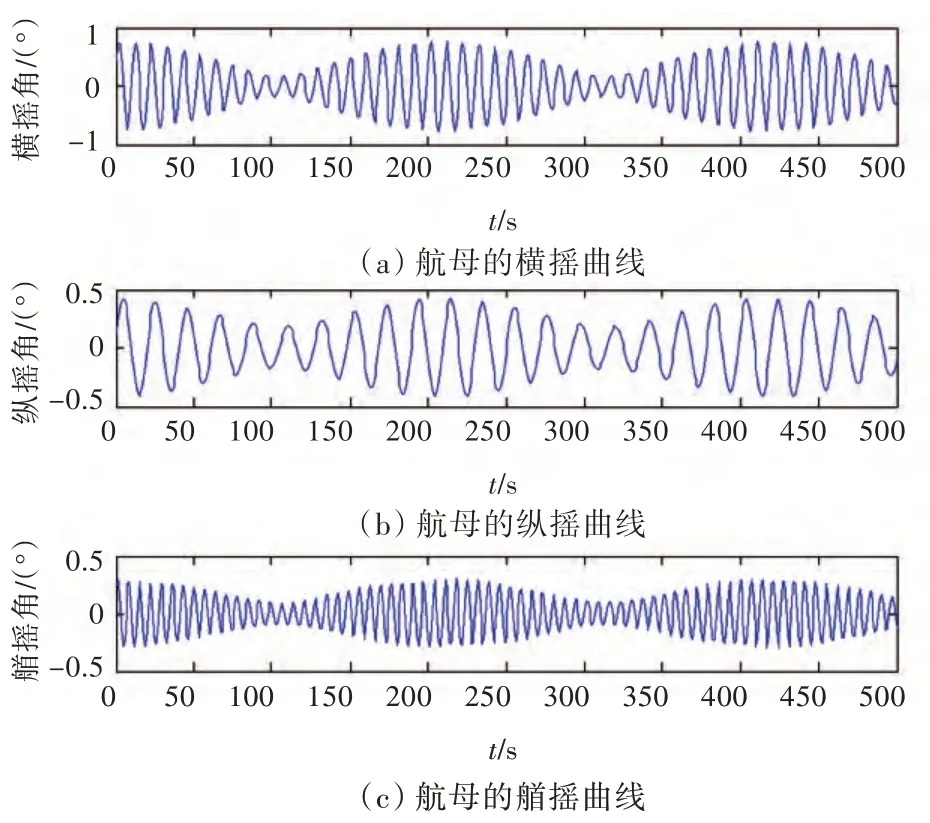
图6 航母的三轴摇摆运动曲线Fig.6 Triaxial rocking motion curve of carrier
图7 航母的沿轴平移运动曲线Fig.7 Translational motion curve along axis of carrier
为研究航母的横摇、纵摇、艏摇、横荡、纵荡、垂荡运动分别对雷达探测精度的影响,进行了多次仿真计算,分别计算航母单独存在横摇、纵摇、艏摇、横荡、纵荡、垂荡运动而忽略其他运动形式的情况下,航母运动对雷达测量目标位置信息的影响曲线,仿真结果如图8~图13 所示。
由图8 可以看出,航母的横摇运动给雷达测量目标的俯仰角和方位角分别带来了约0.05°和0.1°的误差,给雷达测量目标距离带来了约0.2 m的误差,经相关性测试,发现雷达测试数据的误差曲线与航母的横摇曲线呈现出高度的相关关系。

图8 航母横摇对雷达探测精度的影响Fig.8 Influence of carrier roll motion on the accuracy of the radar
由图9 可以看出,航母的纵摇运动给雷达测量目标的俯仰角带来了约1°的误差,对雷达测量目标方位角的影响为10-3量级,可以忽略;给雷达测量目标距离带来了约1 m 的误差,经相关测试,发现雷达测试数据的俯仰角误差与航母纵摇运动呈线性关系。

图9 航母纵摇对雷达探测精度的影响Fig.9 Influenceofcarrier pitching motion on the accuracy ofthe radar
由图10 可以看出,航母艏摇角对雷达测量目标俯仰角基本没有影响,给雷达测量目标方位角带来了约1°的误差,给雷达测量目标距离带来了约2 m 的误差,且方位角误差与航母艏摇运动呈现线性关系。
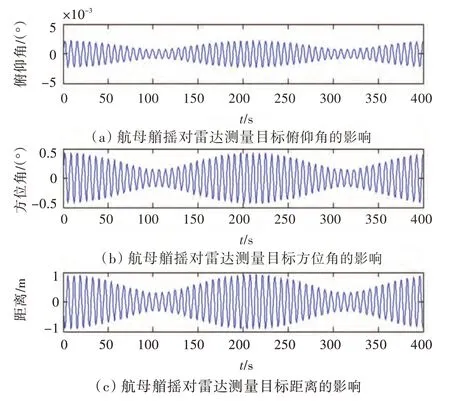
图10 航母艏摇对雷达探测精度的影响Fig.10 Influence of carrier yawing motion on the accuracy of the radar
由图11~图13 可以看出,航母沿轴平移运动对雷达测量目标的俯仰角和方位角的影响分别为10-4和10-3量级,可以忽略;对雷达测量目标的距离约有0.2 m 的影响。
最后,综合考虑航母的横摇、纵摇、艏摇和沿轴平移运动,仿真计算航母运动对雷达探测精度的影响,仿真结果如图14 所示。在航母按前述运动模型运动并且目标位于航母后上方时,航母运动对雷达测量目标的俯仰角、方位角和距离分别产生了约1.5°,1°和5 m 的影响。

图11 航母横荡对雷达探测精度的影响Fig.11 Influence of carrier sway motion on the accuracy of the radar
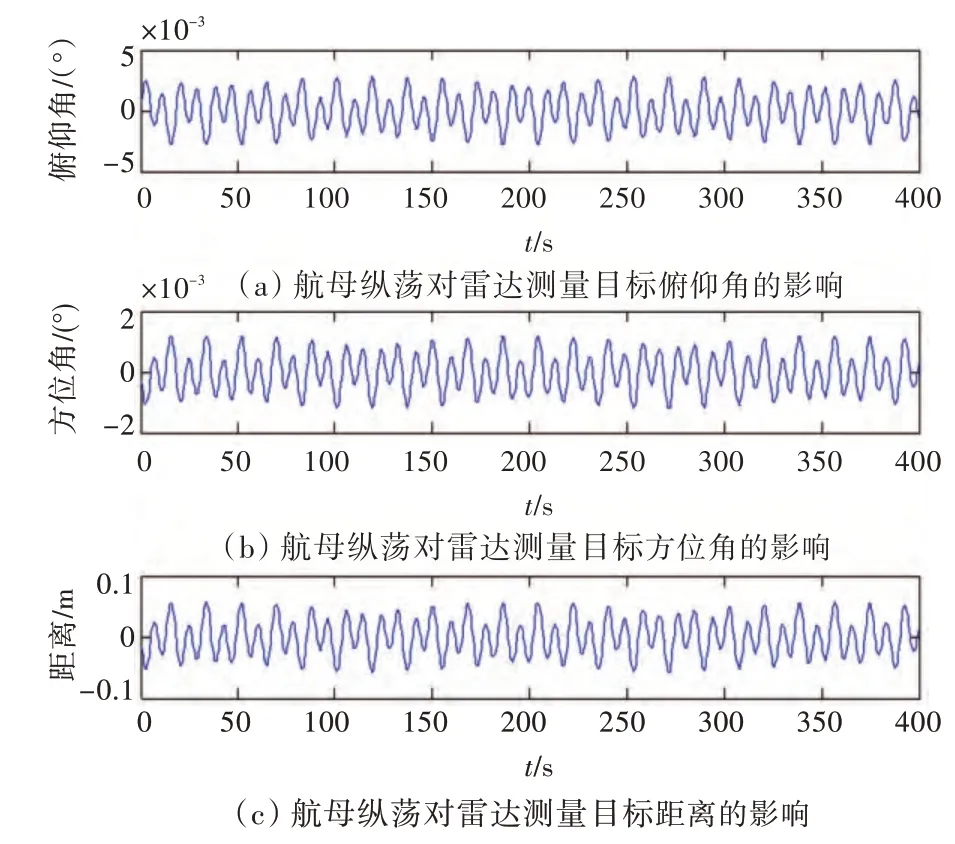
图12 航母纵荡对雷达探测精度的影响Fig.12 Influence of carrier surging motion impact on the accuracy of the radar

图13 航母垂荡对雷达探测精度的影响Fig.13 Influence of carrier heave motion on the accuracy of the radar
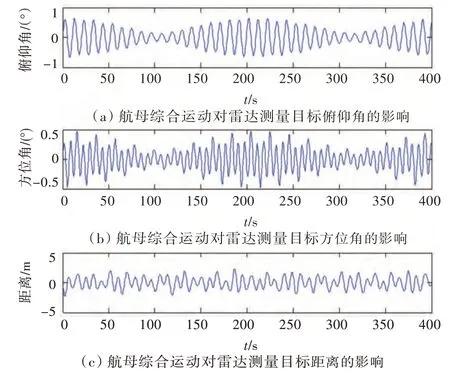
图14 航母综合运动对雷达探测精度的影响Fig.14 Influence of carrier comprehensive ship motion impact on the accuracy of the radar
5 结 语
着舰引导雷达负责跟踪和引导航母舰载机着舰,其精度要求很高,并且在工作过程中雷达时刻受航母六自由度运动的影响。本文建立了必要的坐标系和航母运动模型,并根据实际要求进行计算机仿真,详细分析了航母运动对着舰引导雷达探测精度的影响,得出着舰引导雷达的方位角误差与航母艏摇角成线性关系而与纵摇角无关、俯仰角误差与航母纵摇运动高度相关、距离误差与航母摇摆运动关系不大的结论。为着舰引导雷达的标校工作提供了一定的理论依据和参考,为研究航母的运动姿态提供了思路。
[1]简仕龙.航天测量船海上测控技术概论[M].北京:国防工业出版社,2009.
[2]董玫,张守宏,吴向东,等.舰载雷达天线测角误差分析[J].系统仿真学报,2009,21(15):607-612.DONG Mei,ZHANG Shouhong,WU Xiangdong. An⁃gular error analysis of shipboard radar antenna[J].Journal of System Simulation,2009,21(15):607-612.
[3]潘良.航天测量船船姿船位测量技术[M].北京:国防工业出版社,2009.
[4]张志远,罗国富.舰船姿态坐标变换及稳定补偿分析[J].舰船科学技术,2009,31(4):34-40.ZHANG Zhiyuan,LUO Guofu. Coordinate transforma⁃tion of warship pose and analysis of stabilization com⁃pensation[J]. Ship Science & Technology,2009,31(4):34-40.
[5]冯小勇.运动载体实时精密水平测量方法:中国,200910046330.3[P].2010-04-21.
[6]徐德伦,于定勇.随机海浪理论[M].北京:高等教育出版社,2001.
[7]邱宏安.随机海浪模型的建立及仿真分析[J].系统仿真学报,2000,12(3):226-228.QIU Hong'an. Establishing and simulation for random ocean state model[J]. Journal of System Simulation,2000,12(3):226-228.
[8]王恒,李永刚,陈亮,等.测量船船摇前馈数据处理方法研究及应用[J].飞行器测控学报,2011,30(2):64-69.WANG Heng,LI Yonggang,CHEN Liang,et al. Pro⁃cessing of the shaking feedforward data of space instru⁃mentation ships[J]. Journal of Spacecraft TT&C Tech⁃nology,2011,30(2):64-69.
[9]NEUMANN G. On wind generated ocean waves with special reference to the problem of wave forecasting[D].New York:New York University,1952.
[10]杨盐生,方祥麟.船舶操纵性能仿真预报[J].大连海事大学学报:自然科学版,1997,23(1):1-6.
[11]吴秀恒,刘祖源,施生达.船舶操纵性[M].北京:国防工业出版社,2005.
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
结构工程师(2022年2期)2022-07-15
导航定位学报(2022年2期)2022-04-11
空间科学学报(2020年4期)2020-04-22
学与玩(2018年5期)2019-01-21
现代计算机(2018年19期)2018-08-01
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中学生数理化·七年级数学人教版(2017年1期)2017-03-25