
基于智能小车的硬件设计与调试
2014-02-16 07:38
电子测试 2014年19期
(西安职业技术学院,710000)
基于智能小车的硬件设计与调试
王津红
(西安职业技术学院,710000)
本文对智能小车硬件设计进行了分析研究,结合工程经验,对智能小车的硬件设计和调试方法进行了许多实践和探索性的拓展,为从事相关行业的工程人员提供了方向性的建议。
智能小车;硬件设计;工程经验;调试方法
1 背景
机器人竞赛进入校园已有十多年的历史,已成为培养创新人才,促进教学改革的有力手段。智能小车作为机器人竞赛中的有效载体,其设计开发涉及自动控制、传感技术、模式识别、计算机、电子、电气、机械等多个学科。开展自主智能小车的学习与研究工作,对促进自动控制与人工智能水平的提高,具有良好推动作用。本文结合机器人大赛、全国大学生电子设计大赛的要求,就智能小车的设计和制作调试,提出相应的观点和建议。
2 研究目的
2013年度,西职院机电工程系成立“科技创新工作项目小组”,并申请立项:“基于单片机控制直流舵机机器人的开发”。我作为小组成员负责智能小车的硬件开发。本文从小车中最基本的模块,从人才的培养角度提供引导性方向,拓展学生思路,让学生能够有意识发挥,而非简单的复制电路图搭建电路。让学生感受到能力的跃变过程,让小车动了起来。
3 硬件剖析
常见题目要求:必须使用至少一种传感器来对机器人进行精确控制,要求有寻迹、搬运、识别颜色、感光、灭火等功能,且为自动控制。下面我们从要求的角度进行硬件设计的探讨。
3.1电机选择
智能小车要求具备基本车辆的转向和驱动功能,比赛中多有时间限制,所以还得有调速要求。传统习惯上,参赛选手常选择两种,A:通常为后轮直流电机驱动+前轮舵机转向B: 双步进电机或舵机+万向轮。直流电机控制简单,转速快,但无法精准控制转角,多需要传感器配合。步进电机转速和转角控制精准,但转速较低。这需要根据比赛题目要求做出选择。
3.2车体底板的制作
智能小车车身制作可以根据经济条件而做出不同选择,常见的可采用覆铜板、薄金属板、亚克力板等,根据设计要求,通过划线、定位、剪裁设计出相应的款式,再拿不同的螺丝加紧固件固定。若经济条件允许,可以直接买玩具车,进行拆卸改装!但玩具车多用直流电机,为增加转角控制,习惯用舵机代替。车体的制作还要考虑到,电路板的安装,跟后期传感器的扩展,适当情况为方便依据题目加装面包板。车体上放置电池要考虑到车体的重心、轮胎的打滑等因素。
3.3电源设计
小车的电源电压一般在6-8V左右,电机工作,电池的损耗较大,常见的78XX系列的稳压芯片,因为压差,不再符合要求。依据实际调试经验,尽量多选LM2940、LM2576、MAX638等低压差的芯片。并且电源电路部分,从电池输入段分成两路,使单片机和大电流器件分开供电。常见经典电路是用两片LM2940加滤波电容分开为各模块合理供电,为增加指示性和美观程度,还会串电阻加发光二极管。这样避免了相互的干扰和单片机的稳定运行。电源设计不合理,常见的故障会出现,舵机抖动但无法前行,或者单片机经常掉电,频繁发生误动作。
3.4单片机最小系统
单片机是小车的智能控制中心。所谓最小系统,就是单片机运行的最精简硬件设计。最小系统的合理设计是小车能够平稳运行的前提。51单片机最小系统设计和AVR的最小系统的设计许多共同之处,限于篇幅,不做赘述,仅对调试过程中出现的问题予以罗列。
晶振和电容在做电路板时应注意靠近放置,相距过远易使晶振无法起振,造成系统工作不稳定。典型值为30pF电容,12M晶振。
复位电路包括上电复位和手动复位,51系列单片机多为高电平复位。上电复位的原理为利用电容充电将复位脚拉至高电平,使单片机复位;电容选值多用104或105等高频瓷片电容,在电容充电结束后,10K的接地电阻将复位脚拉至低电平,保证了单片机正常工作。
实际制作ISP下载接口时,常用双排的5*2的排针代替,设计时应注意以下两点,否则极易造成程序下载失败:①下载接口电源要与单片机电源共用。②下载线接口所用单片机引脚避免连接外部器件,或外部器件可设计为可插拔或按钮开关读取的方式。
51的最小系统EA脚为内外存储器的选择引脚,在仅需内部存储器时,须将此脚连至高电平,否则无法工作。另外单片机的P0口无内部上拉电阻,在驱动LED等外部器件时,习惯在P0口加上10K的排阻,用来增强P0口驱动能力。
AVR最小系统仅需电源不加任何外围电路即可工作,且为低电平复位,在接外部晶振后,再写下载程序时应配置好对应的熔丝位,避免造成芯片锁死。
建议根据需要用 Protel软件设计,用proteus软件进行仿真,建立属于自己的最小系统,方便以后的学习竞赛使用。
3.5循迹模块设计
循迹模块一般由红外一体式发射接收器管完成,无色为发射部分,产生人眼不可见的红外光,黑色部分为红外接收部分,其阻值可随红外光的强弱而变化。判断好坏从原理出发,改变光照强弱去测阻值即可。测红外发光管也可用手机摄像头查看,红外夜视摄像头原理正是如此。
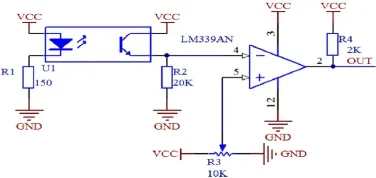
如图所示,常见检测电路中,常选用LM339运算放大器在弱信号检测场合。使用时在输出端需要接上拉电阻(阻值选3-15K)到正电源。阻值不同,输出端高电位的值不同。如果做8路红外光电管检测,采用两片LM339即可,既而简化了电路。51单片机无内置AD故常采用比较器方式,而AVR等因有内置AD或片外AD芯片可直接输入电压量变化,通过单片机A/D端口直接读取。检测电路可优先考虑使用大功率分离式红外光电管、激光管等检测器件,并对红外光调制发射,既而增大探测距离。从电源角度,常使各管轮流扫描,减小功耗。
3.6电机驱动模块设计
由于单片机端口驱动能力不足,驱动电机等大功率外部器件须外加驱动电路。由于H桥电路制作过程麻烦,推荐采用H桥集成电机驱动芯片L298N。L298N 是一个具有高电压大电流的全桥驱动芯片,其响应频率高,一片L298N芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。但由于L298工作时功耗较大,可以适当加装散热片。使用L298N注意该有两个电源,一路为L298需要的5V工作电源VCC,一路为驱动电机电源VSS。应该注意,常用舵机可以直接使用单片机驱动,不加电机驱动模块!
3.7路面检测模块设计
习惯使用金属感应器安装于小车底盘下,距离地面小于四毫米。当行进中金属传感器检测到金属片时将对单片机发送中断信号,单片机运行中断,继而改变电机驱动信号的电压占空比,来达到控制小车的速度。另外利用CCD图像传感器可适用于各种量的检测。具有图像清晰、准确特点,但图像传感器需要处理的信号量太大,价格昂贵,硬件电路设计困难,软件编程复杂,使用存在诸多的不便,故CCD很少被采用。
3.8显示模块设计
常采用1602 LCD,由单片机的总线模式连接。从节能角度出发,LCD 的背光常用单片机进行控制,用电位器改变屏幕亮度。从性价比的角度讲,也可以采用LED七段数码管,采用经典电路译码和驱动,实现I/O口的并用,且显示比较直观。
3.9避障模块设计
考虑到避障只需要检测障碍物,为了便于操作和调试,常采用漫反射式光电开关进行避障。当然也可用超声波传感器进行避障,但超声波传感器需要40KHz的方波信号来工作,因为超声波传感器对工作频率要求较高,偏差在1%内,实际电路很少采用模拟电路来做方波发生器,因为比较难以实现。
3.10转移模块设计
常利用电磁继电器通电的瞬间所产生的磁场来完成金属铁片的转移任务,停电无磁场放下铁片。电磁继电器电流小,磁力强,易于单片机I/O口的控制。在要求简单的环境中,可以通过小车前加固Y形金属装置,继而推动物体,实现搬用。
3.11报警和语音提示模块的设计
常采用单片机产生不同的频率信号,通过蜂鸣器,完成声音的报警提示功能,其硬件电路简单容易实现,但缺乏直观。在救援等方向的要求环境中,通常采用IDS1420可分段录放音模块和功率放大电路;可读性较好,功耗低容易完成救援小车系统的语音提示功能。
3.12测速模块设计
车速检测的方式有很多种,例如用测速发电机、霍尔传感器检测、转角编码盘、反射式光电检测和透射式光电检测。但校际比赛中测速应用较少,故初学者大可以不必考虑速度,通过控制驱动电机上的平均电压控制车速,对小车进行开环控制。但开环控制电机转速,会受很多因素影响,例如电池电压、电机传动摩擦力、道路摩擦力和前轮转向角度等。这些因素会造成赛车运行不稳定,通过速度检测,对车模速度进行闭环反馈控制,即可消除上述各种因素的影响,使得车模运行得更稳定。
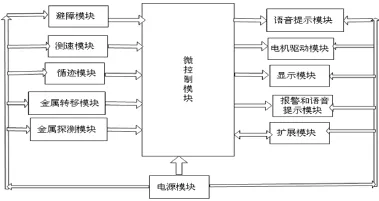
综上,如图所示,结合当前电子市场传感器模块技术相当成熟,名目繁多,单元模块的设计实质上是在依据题目要求情况下,依据性价比原则和可操作性以及实现的难易程度,根据系统来做加减法。
4 智能车的测试步骤
小车测试运行中,我们可以依据系统框图分单元来进行,细分为以下几个步骤:
①先测整机电源,保证各个模块能被良好供电。
②测试循迹模块
③查单片机能否正常的烧写程序和工作。
④不同占空比的信号测试舵机转角性能,找出PWM设置参数。
⑤测试后轮电机不同频率和占空比的情况下电机的驱动能力。
⑥光电管和舵机联合,编写相关程序测试转向情况。
⑦编写测试程序让小车初步运行。
⑧调整参数,记录变化,进而找出最佳配置。
⑨整理数据,完善小车硬件设计、优化算法和程序设计。
[1] 全国大学生电子设计竞赛组委会.第六届全国大学生电子设计竞赛获奖作品选编.北京:北京理工大学出版社,2005
[2] 孙浩.智能小车设计指导.第二版.河海大学计算机与信息学院,2010(9)
[3] 梁丽勤.王岩.张宝健.基于 Freescale 单片机的智能赛车设计[J] 机电产品开发与创新 2010(6) 114-116.
Hardware design and debugging of the smart car
Wang Jinhong
(Xi'an Vocational and Technical College,710000)
In this paper,the hardware design of the smart car were analyzed,with engineering experience, the smart car hardware design and debugging methods have made a lot of practice and conduct exploratory development for engineers engaged in related industries provide directional advice.
Smart car;hardware design;engineering experience;debugging methods
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2019年13期)2020-01-14
阅读(快乐英语高年级)(2019年2期)2019-09-10
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
消费者报道(2016年3期)2016-02-28
