气路碎屑监测静电传感器设计及模拟实验
2014-02-28 07:51曾苏凡蒋世奇袁世辉曲建凤
燃气涡轮试验与研究 2014年5期
曾苏凡,蒋世奇,袁世辉,曲建凤
(1.成都信息工程学院电子工程学院,四川成都610225;2.成都信息工程学院控制工程学院,四川成都610225;3.西北工业大学能源与动力学院,陕西西安710072;4.中国燃气涡轮研究院,四川江油621703)
气路碎屑监测静电传感器设计及模拟实验
曾苏凡1,蒋世奇2,袁世辉3,4,曲建凤1
(1.成都信息工程学院电子工程学院,四川成都610225;2.成都信息工程学院控制工程学院,四川成都610225;3.西北工业大学能源与动力学院,陕西西安710072;4.中国燃气涡轮研究院,四川江油621703)
基于静电感应原理,结合航空发动机尾喷管结构和模拟实验环境要求,设计了一种用于气路荷电碎屑监测的静电传感器。通过荷电碎屑模拟实验,证明了该静电传感器监测荷电碎屑的有效性,并分析了碎屑荷电量、碎屑与探极表面相对位置对传感器输出的影响。结果表明:碎屑荷电量越多,传感器输出电压幅值越大;同一轴向位置,随着碎屑与探极表面径向距离的增大,传感器输出电压幅值迅速减小;碎屑与探极表面径向距离一定时,碎屑与探极末端轴向距离越大,传感器输出电压幅值越小。此外,还进一步分析了实验过程中一些难以避免的影响测量结果的因素。
航空发动机;气路故障;荷电碎屑监测;静电传感器;模拟实验;探极表面
1 引言
使用静电技术监测航空气路故障的研究,始于20世纪70年代初的美国,其使用的基本前提是气路故障产生的碎屑带电[1]。发动机工作正常时,气路环境有一个正常的静电荷水平,而当气体中的荷电碎屑数量增加时,气路的总体电荷水平会随之改变。这种现象产生的原因,可能有叶片磨损、燃烧室产生的大量碳粒散发出来、密封或涂层磨损及外来物等。气路碎屑静电监测技术的基本原理,就是检测发动机气路中碎屑所携带的静电电荷。本文介绍的气路碎屑监测系统,通过置于尾喷管处的静电传感器,来实时监控发动机气路静电荷水平变化,以此来达到监测气路部件状态的目的,为发动机提供初始故障状态的早期预警信息。
1978年,Couch[2]研究并验证了通过监测气路中的静电脉冲信号,能有效监测到发动机的性能退化,并表明采用该方法后大部分发动机至少能提前4 h预测到气路故障。90年代,Powrie等[3-5]对静电监测技术做了大量实验研究,并研制出了发动机故障监测系统(EDMS)和吸入颗粒监测系统(IDMS)。目前,该系统已成功应用在JSF、F-22等项目上,成为英、美等国限制出口的军事技术[6]。
目前,国内静电监测技术用于航空发动机气路状态监测方面的研究还处于初期阶段[7],仍需进行大量的研究和实验,才能最终实用。本文基于静电感应原理,结合航空发动机尾喷管结构和模拟实验环境要求,设计了一种用于气路荷电碎屑监测的静电传感器,并通过模拟实验验证了其监测荷电碎屑的有效性,分析了影响测量结果的因素。
2 静电传感器设计
气路荷电碎屑监测静电传感器,基于静电感应[8]原理设计,主要分为传感器物理结构设计和内部信号调理电路设计两部分。
2.1 物理结构设计
静电传感器的物理结构如图1所示,由探极、内置信号调理电路、绝缘块、屏蔽外壳和输出电缆组成。考虑到航空发动机尾喷管结构和模拟实验环境要求,传感器探极设计为棒状,探极与屏蔽外壳均采用耐高温和电阻率小的不锈钢材料制作,绝缘块采用耐高温(250℃)和电阻率高的聚四氟乙烯制作。在航空气路管道中,荷电碎屑沿虚线由A处运动到B处,经历了远离探极、靠近探极、再远离探极的过程,使得静电传感器探极上的感应电荷随之变化。感应电荷经内置信号调理电路转换放大后输出变化的电压信号,再通过采集板卡采集到计算机中予以显示和保存,从而监测气路中异常荷电碎屑的存在。

图1 典型的发动机振动监测原理图Fig.1 Typical engine vibration monitoring principle
2.2 信号调理电路设计
假设静电传感器探极的感应电荷量为Q,静电传感器的电荷等效电路图如图2所示。图中,Ca为静电传感器自身电容,Cc为传感器输出电缆电容,Ra为静电传感器的漏电阻,Ci为放大器输入电容,Ri为放大器输入阻抗,Cf为放大器反馈电容,Rf为并联在反馈电容两端的漏电阻。由于静电传感器的漏电阻不可能无穷大,感应电荷会通过电阻泄漏,因此电压不能恒定不变。
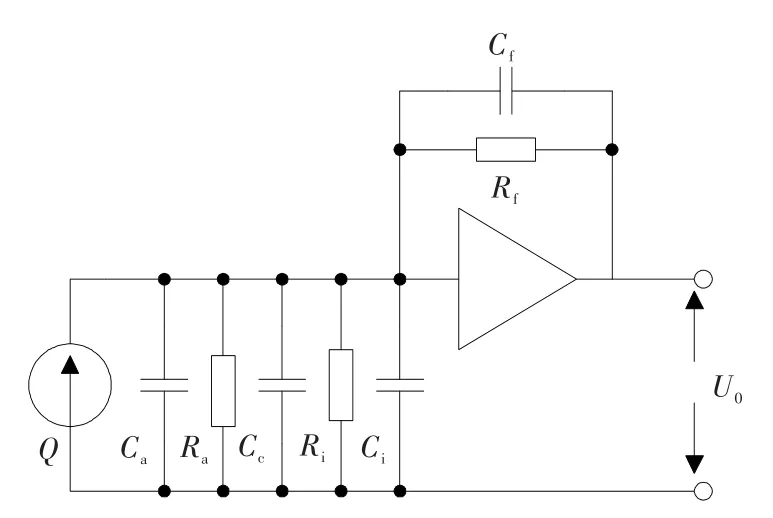
图2 静电传感器与电荷-电压转换电路连接的等效电路图Fig.2 Equivalent circuit of electrostatic sensors and charge to voltage converting circuit
由电路理论可得放大器的输出电压U0:
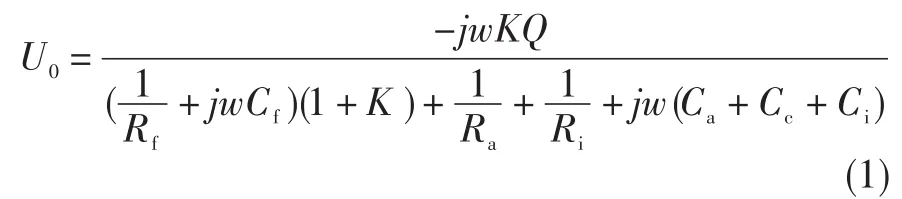
运算放大器的开环增益K=100 dB(TL081运算放大器)即105倍、Cf=1 000 pF时,假设传感器输出电缆长500 m,采用低噪声电缆STYV-1,则Cc≈50 000 pF;假设Ca=6 000 pF;则(1+K)Cf≫Ca+Cc+Ci,此时Ca、Cc、Ci对电路的影响可忽略。当Ra、Ri相当大时,U0可写为:

从式(2)中可看出:电荷放大器的输出电压与电缆电容无关。
静电传感器的信号调理电路,由电荷电压变换电路、适调放大电路、低通滤波电路、高通滤波电路和电源五部分组成,其工作原理如图3所示。

图3 传感器内置信号调理电路工作原理图Fig.3 Schematic diagram of internally-installed signal conditioning circuit
(1)电荷电压变换电路以运算放大器U1为核心,其将静电传感器探极上的感应电荷变换为电压量,并将传感器的高输入阻抗变为低输出阻抗。本设计中的电路参数下,1 pC的感应电荷对应此级输出1 mV的电压值。
(2)适调放大电路以运算放大器U2为核心。当电路最终输出信号大于10 V时,信号将失真,此时可调节电位器使放大倍数降低。
(3)U3构成了二阶有源低通滤波电路,截止频率为100 kHz,用于消除高频干扰信号对电路的影响。
(4)由C4、R4构成一阶无源高通滤波器,截止频率为0.3 Hz,用于抑制低频干扰信号。
(5)电源部分(图中未给出)是通过开关电源得到仪器工作电压±15 V。
3 实验研究
实验目的是验证本文设计的静电传感器对荷电碎屑监测的有效性,并通过控制实验条件的方法,分析实际碎屑监测中输出信号与输入碎屑之间的定量关系。
3.1 荷电碎屑模拟实验装置
实验装置如图4所示,以传感器探极的轴为圆心的虚线同心圆表示传感器的敏感空间;电机转动带动绝缘杆末端的石墨小球逆时针匀速运动,以电机轴为圆心的虚线圆表示石墨小球的运动轨迹;在石墨小球运动轨迹的另一侧加上高压电场,石墨小球经过高压电场后表面带上电荷,以此来模拟荷电碎屑。为避免高压电场对传感器输出造成干扰,淹没石墨小球引起的有用信号,高压电场置于距离传感器探极的最远端。实验时统一传感器和高压电场的参考电压,传感器屏蔽外壳和内置信号调理电路接大地,高压电场负极接大地。

图4 荷电碎屑模拟实验示意图Fig.4 Schematic diagram of charged particles simulation experiment
传感器探极置于屏蔽外壳以外部分长110 mm,探极直径8 mm,石墨小球粒径10 mm,高压电场长度100 mm,绝缘杆长度200 mm。石墨小球运动至距离探极最近端时,探极表面与小球表面最近距离设为X。探极末端平面设为Y=0的平面,沿探极轴向越靠近传感器屏蔽外壳,Y值越大。
3.2 实验结果与分析
3.2.1 传感器输出有效性实验
静电传感器的输出由传感器探极上感应电荷的总量产生,而探极上感应电荷的总量为敏感区域内所有施感点电荷引起的感应电荷的叠加[9]。由于石墨小球粒径远小于其运动轨迹半径,因此可忽略其粒径,将其视作点电荷。
实验中电机转速调至2 000 r/min,石墨小球随电机做匀速周期运动,反复多次经过探极附近,故石墨小球经过传感器敏感区域的速度约为1.256 m/s,通过高压电场充电时间约为2.33 ms。石墨小球旋转轨迹位于Y=10 mm的平面,X=10 mm。
设置采样频率为1 000.0 Hz,图5为实验采集信号通过50.0 Hz陷波器后的输出信号(去除工频干扰),图6为该信号的频域特性。可见,图6中有一频率为35.6 Hz的明显峰值,与小球经过探极附近的频率(约33.3 Hz)十分接近。由于实验误差的存在,因此可确定35.6 Hz即为实际传感器检测到的石墨小球周期运动产生的信号频率,本文设计的静电传感器能有效检测到运动中的荷电碎屑。
3.2.2 参数对传感器输出的影响
二维静电场中,探极上的感应电荷量由施感电荷量和施感电荷与探极表面的相对位置决定[10]。施感电荷量即石墨小球所带电荷量,由小球充电时间决定。由于棒状探极为轴对称,因此施感电荷与探极表面的相对位置,可用X和Y来表示。
降低电机转速至600 r/min,旋转起始点在高压电场内,石墨小球充电一段时间后,转动一圈,由远端至探极附近再转向远端高压电场内停止。充电时间分别为5 s、4 s、3 s和2 s时,改变X值后重复实验。需注意的是,每次实验后,为避免上次实验石墨小球上剩余电荷量对实验造成影响,应对小球完全放电。另外,认为充电时间相同时,石墨小球每次实验所带的电荷量基本一致;X相同时,充电时间越长,小球荷电量越多。图7示出了石墨小球充电5 s,旋转轨迹位于Y=10 mm平面、X=1 mm时,石墨小球单次靠近探极引起的传感器输出信号。
图8示出了小球旋转轨迹位于Y=10 mm平面时,小球与探极表面径向距离对传感器输出的影响。可见,荷电量相同时,X越大,传感器输出电压越小;X、Y都相同时,小球荷电量越多,传感器输出电压越大。

图5 模拟实验去工频处理后的信号Fig.5 Signal after power frequency processing in simulation experiment
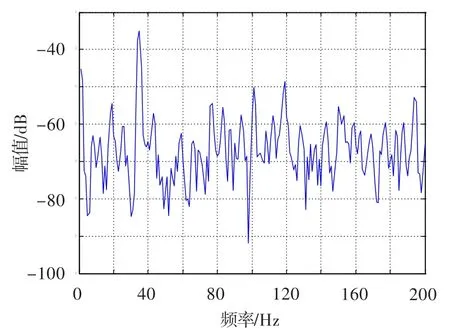
图6 信号的频域特性Fig.6 Frequency spectrum of the signal

图7 石墨小球充电5 s,X=1 mm、Y=10 mm时静电传感器的输出信号Fig.7 Electrostatic sensor output signal while graphite ball charging 5 s,X=1 mm,Y=10 mm

图8 小球与探极表面径向距离对传感器输出的影响(Y=10 mm)Fig.8 Influence of radial distance between the ball and the surface of the electrode on sensor output(Y=10 mm)
图9示出了小球轴向位置对传感器输出的影响,其中小球充电时间统一为5 s。可见,X一定时,小球沿探极轴向位置方向移动时,随着Y值的增大,传感器输出电压逐渐减小。
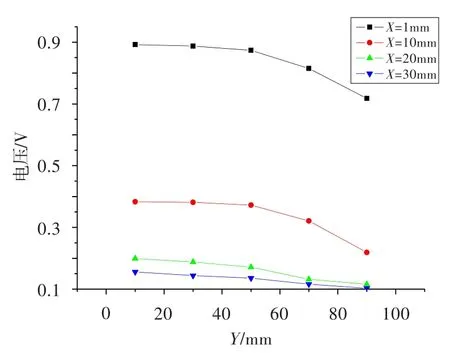
图9 轴向位置对传感器输出的影响Fig.9 Influence of axial position on sensor output
用实验的方法改变碎屑荷电量、碎屑与探极表面的相对位置,探极表面的感应电荷会产生变化,引起传感器输出变化,从而可分析得到传感器的灵敏度分布情况。但由于实验过程中的参数难以精确控制,因此存在着一些难以避免的误差,如:
(1)文中认为小球充电时间一致时,其荷电量基本相同,但实验中充电时间难以精确控制,另外即使充电时间完全一致,小球荷电量也不能保证完全相同。因此,实验中设计的充电时间相差较大(1 s),这样不同充电时间下小球荷电量相差较多,在实验结果趋势存在的情况下可使其误差在允许范围内。
(2)石墨小球与传感器探极表面的相对位置难以精确控制,因此对探极表面的感应电荷量也会产生影响。通过优化实验装置可减小该误差,且该误差不影响实验结果趋势。
(3)探极表面的感应电荷量会受湿度、温度等实验环境变化的影响,实验环境变化较大时其影响较大。本文所用实验数据集中在较短时间内采集、存储,环境温度、湿度变化不大,环境引起的误差较小,可忽略不计。
4 结论
本文基于静电感应原理设计的静电传感器,能有效监测到荷电碎屑。通过荷电碎屑模拟实验表明:碎屑荷电量越多,传感器输出电压幅值越大。同一轴向位置,碎屑与探极表面径向距离越大,传感器输出电压幅值减小越迅速;碎屑与探极表面径向距离一定时,随着碎屑距探极末端轴向距离的增大,传感器输出电压幅值逐渐减小。本文所做工作,为气路碎屑监测系统的后续研究提供了依据。
[1]Fisher C E.Gas Path Debris Monitoring-A 21st Century PHM Tool[C]//.IEEE Aerospace Conference Proceedings. Montana:IEEE,2000.
[2]Couch R P.Detecting Abnormal Turbine Engine Deteriora⁃tion Using Electrostatic Methods[C]//.AIAA Aircraft Sys⁃tems and Technology Conference.1978.
[3]Powrie H E G,Mcnicholas K.Gas Path Condition Monitor⁃ing During Accelerated Mission Testing of a Demonstrator Engine[R].AIAA 97-2904,1997.
[4]Powrie H E G,Fisher C E.Monitoring of Foreign Objects Ingested into the Intake of a Gas Turbine Aero-Engine [C]//.International Conference on Condition Monitoring Proceedings.UK:University of Wales Swansea,1999:175—190.
[5]Powrie H E G,Fisher C E.Engine Health Monitoring To⁃wards Total Prognostics[C]//.IEEE Aerospace Applica⁃tions Conference Proceedings,Colorado:IEEE,1999.
[6]Powrie H,Novis A.Gas Path Debris Monitoring for F-35 Joint Strike Fighter Propulsion System PHM[C]//.Proceed⁃ings of IEEE Aerospace Conference.Montana:IEEE,2006.
[7]王华.气路静电传感器传感分析及应用研究[D].南京:南京航空航天大学,2009.
[8]刘尚合.静电放电及危害防护[M].北京:北京邮电大学出版社,2004.
[9]张祖寿.导体达到静电平衡所需时间的数量级估计[J].物理与工程,2003,12(2):20—21.
[10]蔡圣善,朱耘,徐建军.电动力学[M].北京:高等教育出版社,2002.
Electrostatic Sensor Design for Debris Monitoring in Gas Path and Simulation Test
ZENG Su-fan1,JIANG Shi-qi2,YUAN Shi-hui3,4,QU Jian-feng1
(1.College of Electronic Engineering,Chengdu University of Information Technology,Chengdu 610025,China;2.College of Control Engineering,Chengdu University of Information Technology,Chengdu 610025,China;3.School of Power and Energy,Northwestern Polytechnical University,Xi’an 710072,China;4.China Gas Turbine Establishment,Jiangyou 621703,China)
Based on the principle of electrostatic induction,combining the structure of aero-engine nozzle and the requirements of simulation environment,an electrostatic sensor for charged particles monitoring in gas path was designed.The validity of the electrostatic sensor in charged particles monitoring was proved by charged particles simulation experiments.The effects of the particles charge,and the distance between the particles position and the electrode surface on the output of the sensor were also analyzed.The experimental results show that the more the charge of particles is,the bigger the output voltage amplitude of sensor is;the sensor output voltage amplitude decreases rapidly as the radial distance of debris and the surface of the electrode increases in the same axial location;the sensor output voltage amplitude gets smaller as the dis⁃tance between the debris and the electrode surface in the axial gets larger in case the radial distance be⁃tween the debris and the electrode surface is fixed.Some inevitable factors which affect the measuring re⁃sults in the experiments were further analyzed.
aero-engine;gas path fault;charged particles monitoring;electrostatic sensor;simulation test;surface of the electrode
V263.6
:A
:1672-2620(2014)05-0058-05
2014-02-14;
:2014-10-27
航空科学基金(20101024005);成都信息工程学院科研基金(KYTZ201106)
曾苏凡(1987-),女,江西南昌人,硕士研究生,研究方向为信号获取技术及处理。
猜你喜欢
阅读(快乐英语高年级)(2022年3期)2022-03-30
包装工程(2022年5期)2022-03-21
矿业科学学报(2022年2期)2022-01-11
科学与生活(2021年3期)2021-11-10
科学与信息化(2020年10期)2020-06-19
科学导报·学术(2018年11期)2018-10-21
伴侣(2018年2期)2018-02-28
分析化学(2017年12期)2017-12-25
江苏农业科学(2014年7期)2014-09-02
岩土力学(2014年1期)2014-01-20