
基于模糊PID算法的船舶锚机控制系统设计
2014-03-08 02:01李元贵付焕森曹先锋
自动化与仪表 2014年8期
李元贵,付焕森,曹先锋
(1.泰州学院 机电工程学院,泰州 225300;2.泰州三福船舶工程有限公司,泰州 225300)
随着科学技术的发展,船舶自动化水平也在不断提高,其中船舶锚机的控制方式也日趋自动化和智能化。目前,船舶锚机控制大都是采用机电液控制方式,速度控制分为有级调速和无级调速:有级调速是指交流双速和交流3速两种类型,通过凸轮开关可以实现电动机的正反转,以及低、中、高3速的控制;无级调速是指以PLC为控制核心,采用变频器的速度调节器控制速度,实现无级调速。前者控制方式的特点是控制方式简单,成本也较低,但是精度比较低,特别是低速特性不理想,机械振动和各种损耗大;后者控制方式的特点是控制方法也简单,成本较高,但是维护维修工作大幅度降低,上位机的界面操作比较人性化,而且能够实时显示相关参数;采用无级调速是锚机控制发展的趋势。
锚机控制主要是起锚和抛锚,抛锚相对比较简单,只要电机反转和速度可调即可,起锚比较复杂,受力不断变化,共分为4个过程,每个过程因为受力转矩的不同,环境改变差异更大,电机的转速也需要相应的变化,所以锚机很难建立精确的数学模型。对于上述分析的2种方法,无级调速要优于有级调速。模糊控制是不依赖于系统的数学模型,结合常规PID控制,能够使锚机根据不同的环境迅速改变电机速度,实现锚机的智能化控制[1]。
1 锚机模糊控制
1.1 起锚过程分析
锚机控制主要是起锚工作过程比较复杂,可分为4个阶段,如图1所示。第1阶段,收锚准备阶段,锚机收起躺卧在海底的锚链,此过程锚机的负载转矩基本没有变化;第2阶段,锚机拉动锚链逐渐收紧,此时锚机的负载转矩也慢慢增大;第3阶段,锚机拔锚出土,此时锚机的负载会突然增至最大,此时电机没有及时调整最大力矩拖出船锚,一定时间内必须切断电机主电源,否则将会导致电机堵转烧毁;第4阶段,锚机收起悬挂在海中的船锚,此时锚机负载转矩因为船锚出土后突然减为最小,此阶段后期负载转矩变化不大,锚机全部收好船锚后完成全部动作[2]。

图1 收锚过程示意图Fig.1 Schematic diagram of closing anchor
收锚过程中,锚机锚链上的受力不断变化,其中第3阶段船锚出土时为最大,根据图1可分析得到锚链受力分析如图2所示。
1.2 模糊PID控制
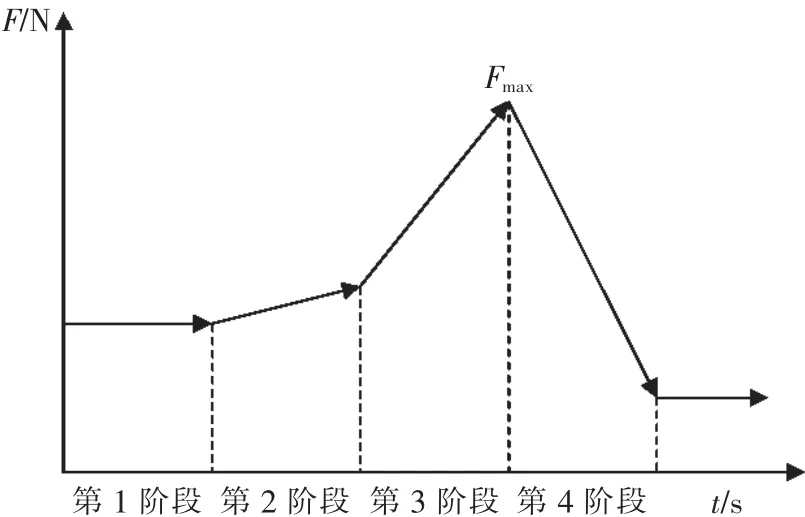
图2 收锚过程受力分析Fig.2 Stress analysis process of closing anchor
从图2可以发现,锚机在整个起锚过程中受力是不断变化的,文献[3]给出第3阶段的最大值计算公式

式中:K是锚链与链轮、擎链器的摩擦系数;φ是锚链在海水中的失重系数;m为锚质量;ρL为锚链每米质量;h为抛锚深度。锚机的最大功率Ne为

式中:ν是起锚速度;η为锚机机械效率。通过式(1)和式(2),可为选择电机功率做参考,但船在行驶过程中,环境是根据四季不断变化的,可能在收锚过程中遇到水草等障碍物,也会造成锚机负载的变化,锚机系统很难建立精确的数学模型,所以利用模糊控制和PID控制,根据不同阶段的负载转矩变化调整锚机速度。模糊PID控制系统如图3所示,通过测量转矩Mc,计算给定转矩M和测量转矩Mc的误差和误差变化率,进行模糊化、模糊控制规则得出 ΔKp、ΔKi、ΔKd, 解模糊得出 Kp、Ki、Kd的参数值,送入PID控制器再至变频器,从而控制锚机的转速[3-4]。模糊控制过程如图3所示。
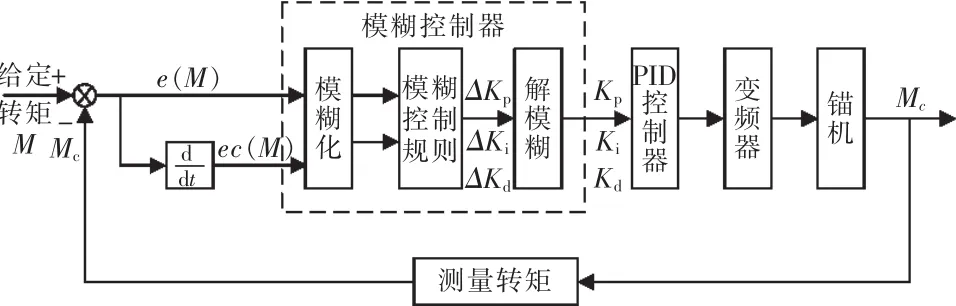
图3 模糊PID控制系统框图Fig.3 Block diagram of Fuzzy PID control system
1)模糊化
设计转矩模糊PID的控制器时,可以利用双输入、3输出模式的Fuzzy控制器结构,输入量为e(kT)、ec(kT),输出量为 Kp、Ki、Kd,为了方便描述,定义如下:
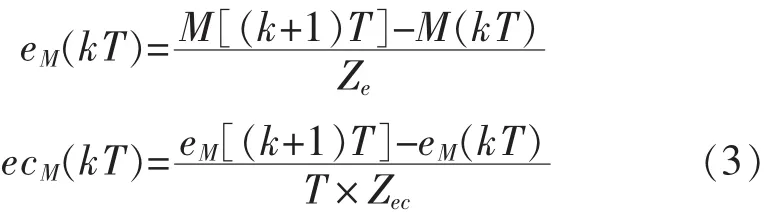
式中:T为采样周期;M(kT)为第 k个转矩给采样值;eM(kT)为第 k 个转矩误差输出采样;ecM(kT)为第k个转矩误差变化率输出采样;Ze和Zec分别为控制误差和误差变化率输出范围的数值。
2)建立数据库
设 e(kT)、ec(kT)的论域定义为 X={-3,-2,-1,0,+1,+2,+3}在论域上取七个量,NL、NM、NS、ZE、PS、PM、PL,对应为负大、负中、负小、不变、正小、正中、正大;e(kT)、ec(kT)采用对称而且均匀分布的高斯三角函数。
3)规则库和模糊推理
规则库是根据专家的经验积累,共有64条规则。
IF E=NL AND EC=NL,THEN ΔKp=PL,ΔKi=NL,ΔKd=PS
如果负载转矩的误差是负大,并且负载转矩的误差变化率是负大,说明锚机给定的负载转矩和锚机实际需要的负载转矩差别较大,所以需要ΔKp参数为正大,ΔKi参数为负大。ΔKp参数正大表示系统偏离程度严重,急需调整给定负载转矩。
IF E=NL AND EC=NS,THEN ΔKp=PL,ΔKi=NM,ΔKd=NL;
IF E=NL AND EC=ZO,THEN ΔKp=PL,ΔKi=NB,ΔKd=PS;
IF E=NL AND EC=NM,THEN ΔKp=PL,ΔKi=NL,ΔKd=NS;
…
4)解模糊
输出量为 Kp、Ki、Kd,论域、语言变量和 e(kT)、ec(kT)一样,解模糊一般采用加权平均解模糊的方法[4-5],即:
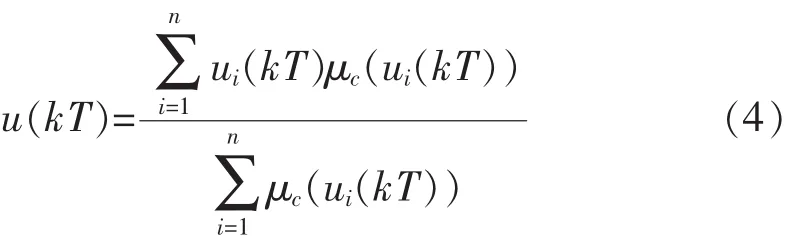
式中:u(kT)为清晰化值;ui(kT)为模糊控制器输出;μc(ui(kT))为对应于 ui(kT)的隶属度。
通过模糊PID控制,锚机不管在哪个阶段,只要比较给定负载转矩和测量负载转矩的差值以及差值变化率,就可以得到对应的Kp、Ki、Kd的参数值,而不需要锚机起锚时精确的数学模型。
2 硬件设计
硬件设计选用三菱PLC控制器,通过编程实现船锚锚机的手动和自动控制;选用施耐德变频器作为锚机速度调节的控制器,电路图如图4所示,共有两台电机M1和M2,M1为锚机的润滑电机,功率不大,星三角启动即可;M2为锚机的拖动电机,由变频器控制,M1先于M2起动。FX2N-48MR的FX2N-4AD和FX2N-2DA分别为PLC的模拟量输入和输出拓展接口,用于接收负载转矩的信号和输出给变频器的调频信号。
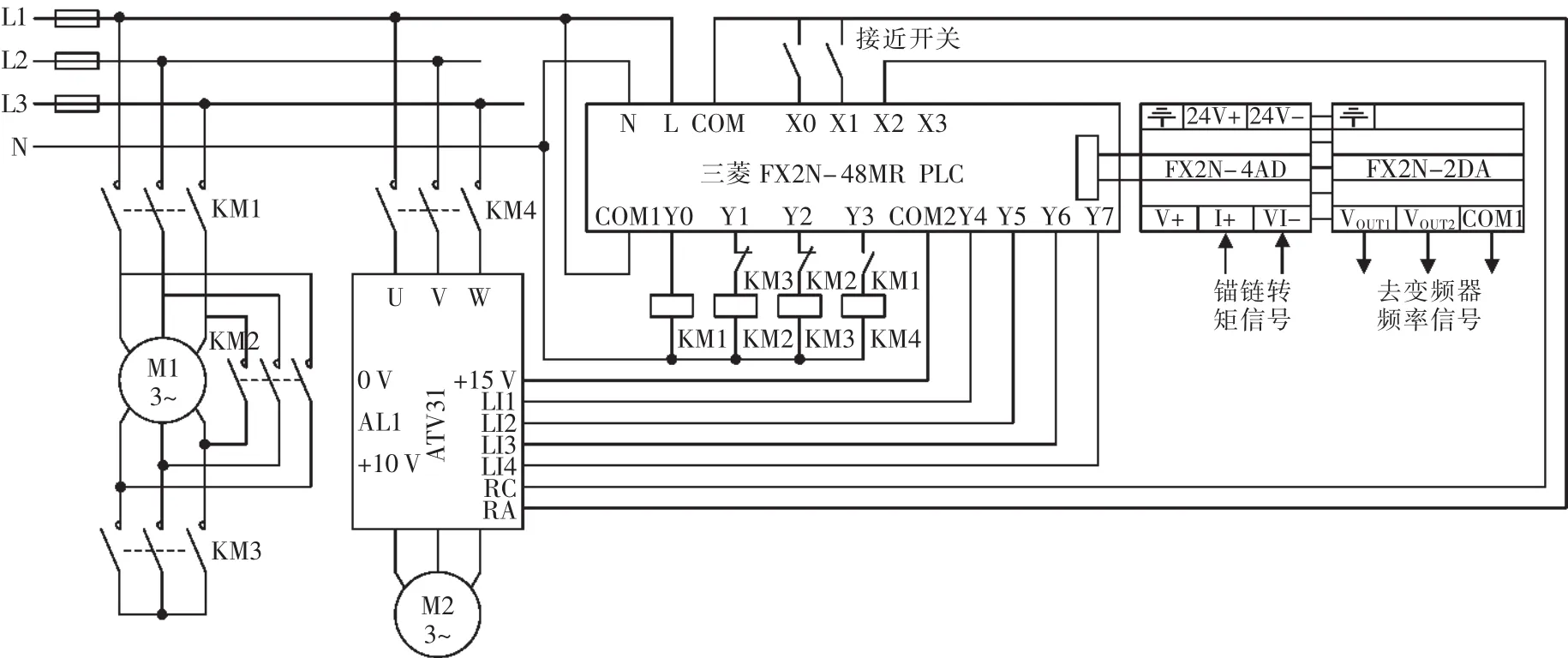
图4 模糊PID控制硬件接线图Fig.4 Hardware wiring diagram of Fuzzy PID control
3 软件设计
软件设计分为上位机触摸屏界面设计和PLC程序设计。
3.1 上位机设计
上位机触摸屏分为手动和自动控制,手动控制用低、中和高档等按钮控制锚机的4段速度调节,与图1提到的4个阶段的速度基本一致;自动控制即是模糊PID的智能控制。上位机除此之外,还能在线显示电机转速、锚机负载转矩的变化以及出现意外时的报警信号,如图5所示[5-6]。
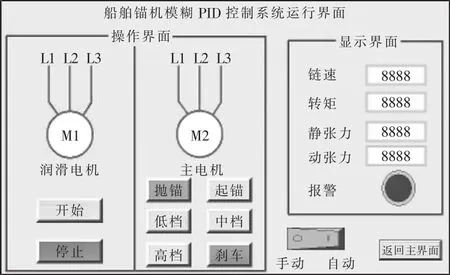
图5 上位机设计界面Fig.5 Design of PC Interface
3.2 PLC程序设计
锚机手动和自动控制都是通过PLC、变频器、PID控制器实现。手动部分较简单,4段速度由ENCO指令即可完成;自动部分较为复杂,主要是模糊 PID 程序设计,首先把变量 X={-3,-2,-1,0,+1,+2,+3}分别存储到地址 D={D1,D2,D3,D4,D5,D6,D7}中,其次把负载转矩的初定值和PLC采集到的转矩值存储到D100、D101中,计算eM、ecM的值分别存储到D102、D103,然后经过数据处理量化至变量论域中的数据存储到D104、D105,查询模糊规则表得出 ΔKp、ΔKi、ΔKd并存储 D201、D202、D203,再通过解模糊得出 Kp、Ki、Kd的值, 最后把 Kp、Ki、Kd的参数值送至PID控制器,进而控制变频器至锚机,直至满足要求后退出程序,程序流程图如图6所示。
4 运行结果
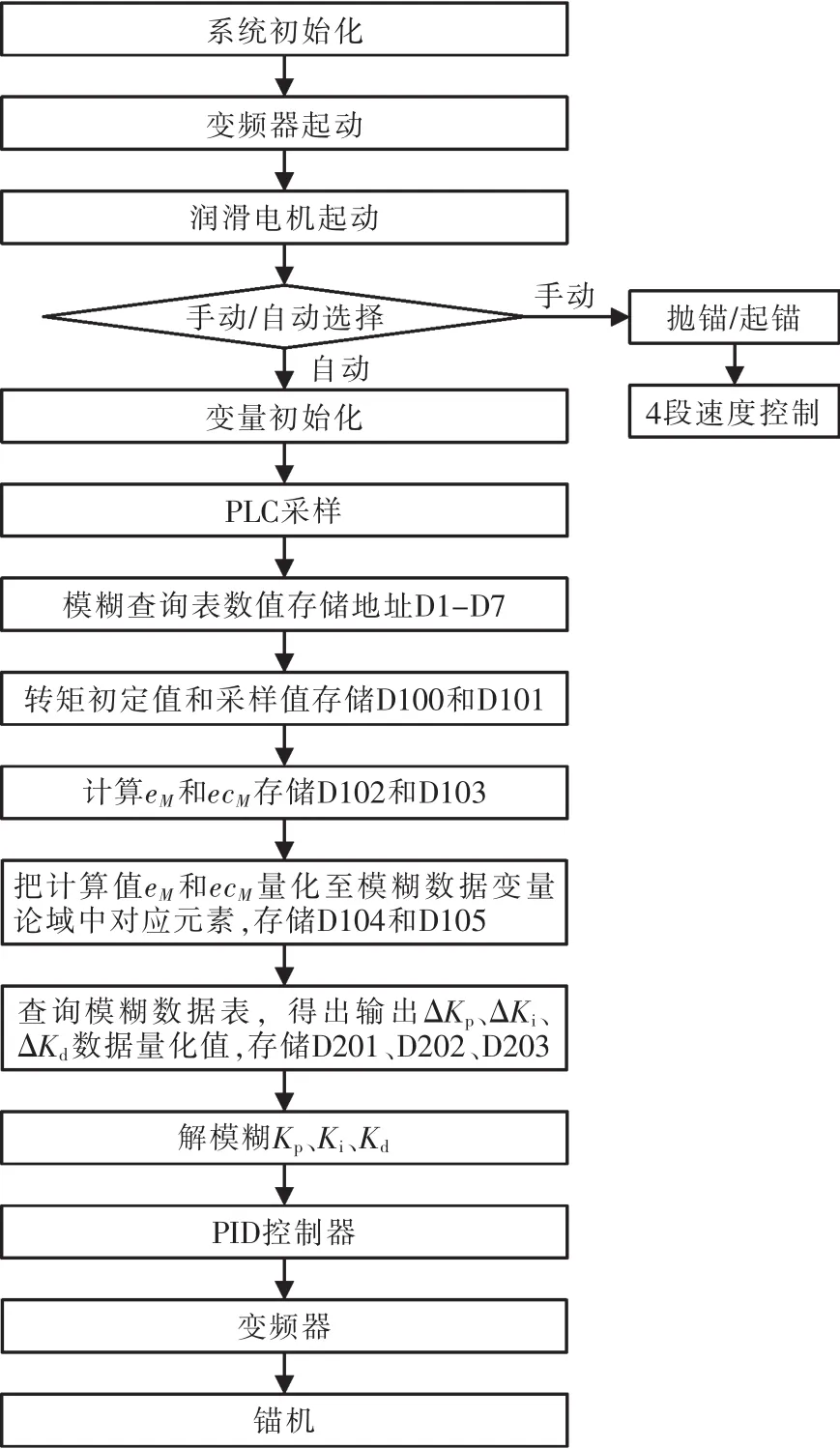
图6 锚机自动控制程序流程图Fig.6 Flow chart of Windlass automatic control program
在Matlab里建立仿真模型,测试锚机在起锚第3阶段抗负载突变的能力。分别设计了传统型PID控制和模糊PID控制,速度变化曲线如图7和图8所示,通过两种控制方法的仿真结果比较可看出,模糊PID控制下的锚机转速很快达到200 r/min,无超调;在第3 s锚机突加负载,模糊PID控制和常规PID控制下的锚机转速都有变化,但模糊PID响应较快;在第4 s时模糊PID速度调整到200 r/min,而常规PID控制要到第7 s。由此可见,不管是响应速度还是突加负载,模糊PID控制都是优于常规PID控制。
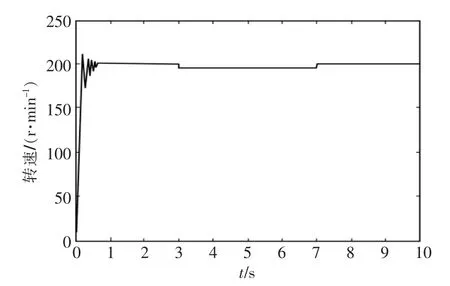
图7 传统PID控制Fig.7 Speed of traditional PID control
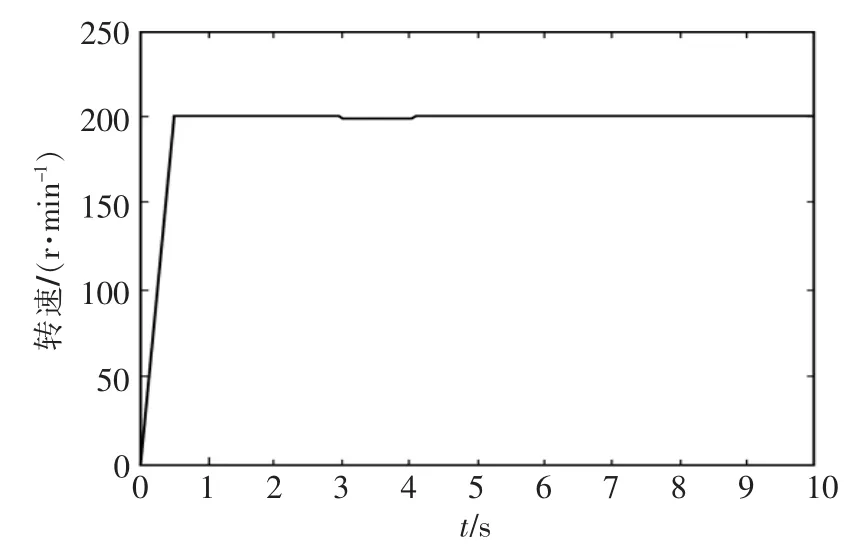
图8 模糊PID控制Fig.8 Speed of Fuzzy-PID control
5 结语
模糊PID算法嵌入到PLC程序设计中,利用组态触摸屏和变频器实现锚机的无级调速,克服了锚机手动控制和有级调速存在的缺点。该设计具有可视化的人机界面,快速的响应速度和负载转矩变化处理能力,实现了船舶锚机的自动化和智能化。经泰州某船厂的运行调试,系统可靠稳定,操作方便简单,可视化程度好,得到船厂用户的认可。
[1] 张书忠.锚机自动控制技术发展综述[J].船电技术,2012,32(4):46-48.
[2] 张庆举,吕洪君.锚机液压驱动改装的研究及设计[J].中国修船,2012,25(6):37-38.
[3] 马南琦.基于模糊算法的船舶锚机自动控制的研究[J].武汉理工大学学报,2002,26(3):362-363.
[4] 吴雷,付焕森,韦凯,等.基于模糊神经网络的感应加热电源机组研究[J].电力电子技术,2007,41(12):93-95.
[5] 宋向前,赵振江.基于PLC的变频器多段速控制系统[J].电工技术,2012(11):33-34.
[6] 杨庆堂.PLC在船用三速锚机控制系统中的应用[J].制造,2008(24):112-114.■
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
船海工程(2021年6期)2021-12-17
防爆电机(2021年5期)2021-11-04
海洋工程装备与技术(2021年2期)2021-02-24
船舶标准化工程师(2020年1期)2020-06-12
船舶标准化工程师(2019年3期)2019-07-01
中国修船(2018年5期)2018-10-17
电机与控制学报(2018年9期)2018-05-14
中国矿业(2013年4期)2013-09-07
