雾霾下车辆前照灯自适应系统浅析
2014-03-30 00:38重庆交通大学交通运输学院禚宝国徐青龙张航
河北农机 2014年2期
重庆交通大学交通运输学院 禚宝国 徐青龙 张航
雾霾下车辆前照灯自适应系统浅析
重庆交通大学交通运输学院 禚宝国 徐青龙 张航
本文分析了车辆在雾霾下行驶的特点,在对比传统前照灯的基础上,针对雾霾下行车进行了前照灯自适应分析;并通过选型确定了实时检测的雾霾天气检测仪,构建了在雾霾下行车的前照灯自适应系统,确定了系统的硬件构成和控制方案,为车辆在雾霾下行车的前照灯自适应分析、研究和实现奠定了基础。
雾霾;行车;前照灯;自适应系统
1 引言
传统前照灯系统只有近光灯和远光灯两种照明切换模式,随着人们对汽车行驶安全及车辆智能化发展的需要,对车辆的各个系统都提出了更高的要求,这其中就包括对前照灯的自适应要求[1]。
雾霾下行车状态是在新的恶劣环境下对前照灯系统自适应特性的崭新要求。照明系统作为汽车最重要的三大安全部件之一,它的好坏直接决定着夜间行车的安全性[2],在雾霾下行车除了需要克服诸如车辆转弯时存在的照明暗区以及车辆在雨天行驶时地面积水的反射眩光等问题外,还要考虑雾霾环境的特殊性,这对照明系统的自适应提出了更高的要求。本文就在雾霾下对车辆前照灯系统的自适应特性进行了研究。
2 雾霾下行车特性分析
在严重雾霾天气状况下,行车的能见度差、视线不好是行车驾驶人员面临的最大问题[3]。另外,由于雾霾的特殊性:团雾是局部的水汽受辐射降温引起的,素有“马路杀手”之称;在雾霾状况下,雾有反射作用,前照系统的远光灯灯光会通过雾反射进入车内,这样会使得车辆驾驶人员视线变得模糊,这样就会直接给驾驶人员的判断能力带来影响,增加了事故发生的可能性;另外,在雾天条件下车辆的制动器敏感性会下降,这样就使得驾驶人员的刹车制动距离增加;雾霾下车窗,包括前挡风玻璃,会雾化,这加剧了驾驶人员在行车中对能见度的把握;“象鼻形”雾气对驾驶人员判断的影响,这包括该现象容易引发驾驶人员疲劳、驾驶行车中的不良心理因素等,该“象鼻形”雾气是这样一种现象:雾霾发生时,其能见度较低,大约为200~300米时,随后能见度突然增大到600~700米,且这一现象所需的时间较短,大约10min,给驾驶人员的错觉是雾霾即将散去,但又在最少30min最多2h的时间内,其能见度又急剧下降,下降后的能见度比开始发生雾霾的的能见度还低。
3 雾霾下车辆自适应系统硬件实现
为实现前照灯自适应系统AFS在该行车环境下高速行车、乡村行车、弯道行车等,通过雾霾下行车状态分析,需要对前照灯自适应系统的转角和光源部分进行分别控制。
3.1 前照灯自适应系统光源方案
LED(发光二极管)较之传统的前照灯光源,其优点是体积小、节能显著、使用寿命长、重量轻、可以在高速状态下切换工作,而且从外形上看很具美感。单个LED(发光二极管)功率较小,其灯光不能满足雾霾下使用所需,所以本文在该前照灯的硬件设计中,采用多个LED灯排列起来组成前照灯。
采用上述方案的优点是:能够提供足够汽车行驶中所需的灯光功率;可以对多个LED进行不同的开关控制和旋转,这样就可实现前照灯自适应系统AFS功能模式所要求的不同光型;使前照灯系统在发出同样照明亮度的情况下更节能且增加AFS系统的可靠性。该方案的是通过车辆传感器采集雾霾下的环境信息并传至中央控制单元,中央控制单元将数据处理后去控制各个角度LED的亮度。
3.2 雾霾下行车的AFS系统控制方案
在该行驶状态下需考虑的因素有:车辆行驶速度及车辆转向、交叉路口灯光的调整、“象鼻形”雾气的自适应、车窗雾气的驱散、城市及乡村道路灯光的切换等等。为了实现在雾霾行车下上述车辆的各种照明模式,本文提出了控制方案,该方案由3部分组成,分别为传感器信息源组件、中央处理单元、执行机构,并且为了使三部分之间通讯,需要有传输总线。其具体控制方案为:首先通过传感器组件获取的行车环境信息,如光线强度、车速、转向角度、路面信息等,通过传输总线传递到中央处理单元,中央处理单元中MCU通过控制算法和控制逻辑,将运算结果——控制执行命令,通过传输总线传递到各个执行单元,通过执行单元的动作实现车辆前照灯系统在雾霾下行车的自适应。其具体的控制示意图如图1所示:
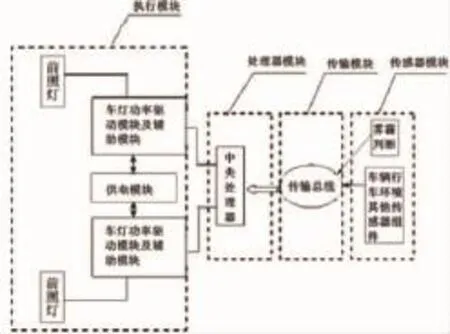
图1 雾霾下车辆前照灯AFS系统结构框示意图
3.3控制系统硬件具体描述
3.3.1 雾霾天气检测仪
该检测仪能够对车辆行使环境的雾霾情况进行实时检测并判断,本文选择的雾霾检测仪型号为LD-5,该型雾霾检测仪拥有新世纪国际先进水平的新型内置滤膜在线采样器的微电脑激光粉尘仪,在连续监测粉尘浓度的同时,可收集到颗粒物,以便对其成份进行分析,并求出质量浓度转换系数K值。该型检测仪可选范围为PM10、5、2.5、1.0和TSP切割器。仪器采用了强力抽气泵,更适合配备较长采样管的中央空调排气口PM10可吸入颗粒物浓度的检测和对可吸入尘PM2.5的监测。
3.3.2 其他传感器组件:包括光敏传感器、车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、风速、传感器、颗粒物传感器、汽车位置传感器等,用以实现对车辆不同信号的采集。
3.3.3 中央处理器模块:本文选用AT89S51单片机作为AFS系统中的MCU,来实现对车辆LED灯功率驱动芯片、灯具转角的步进电机及其他辅助功能模块的控制。
所有传感器获取的车辆行车环境状态作为AFS前照灯自适应系统的输入,该输入信息通过MCU计算后输出对前照灯的转向控制、功率控制,以实现车辆对照射范围、照射角度、灯光亮度的调整,各个信息之间的传递采用总线传输。
4 结论
本文对雾霾下行车状态进行分析,得出了该状态下对驾驶员所带来的行车障碍,并对该环境状态下的车辆前照灯自适应系统进行了硬件设计并确定了其控制方式,为车辆的AFS前照灯自适应系统设计及分析提供了理论支持和重要依据。
[1]卜伟理.自适应前照明系统(AFS)简介及发展趋势[J].光源与照明,2009(2):22~23.
[2]黄任忠.汽车自适应照明系统开发[D].大连:大连理工大学,2009.
[3]房旭,姚勇,何云堂等.智能汽车前照灯系统AFS[J].上海汽车,2008,(8):40~42.
禚宝国,男,在读研究生,山东临沂人,1989年5月出生,研究方向:交通与车辆安全。
猜你喜欢
科技与创新(2021年21期)2021-11-29
就业与保障(2021年9期)2021-11-22
汽车实用技术(2019年9期)2019-11-25
汽车维护与修理(2018年7期)2018-10-13
农村百事通(2018年16期)2018-09-29
汽车维护与修理(2016年4期)2016-11-26
中国交通信息化(2016年6期)2016-06-06
海洋气象学报(2016年3期)2016-02-28
气象研究与应用(2016年4期)2016-02-27