
太阳能板清理机的运动学分析*
2014-04-16 07:41关士学
机械制造 2014年4期
□ 刘 军 □ 关士学 □ 赵 飞
兰州理工大学 机电工程学院 兰州 730050
随着现代社会的快速发展,人们对能源的需求量也在不断增长,太阳能光伏发电作为一种新型的清洁能源有着十分广阔的发展前景。国际能源署的相关数据显示,如在全球4%的沙漠上安装太阳能光伏系统,就足以满足全球的能源需求[1]。太阳能板是太阳能光伏发电系统中的核心部分,其最大的问题不是阴雨天气,而是灰尘。太阳能板上很容易积累灰尘,如果不及时除去,会产生静电,还会降低面板的能量吸收和转换效率,导致资源浪费。正常工作情况下,一般多晶硅的太阳能板转换效率仅有6%~10%,单晶硅的光转换效率有15%~20%。1998年德国费莱堡太阳能系统研究所制得的CaAs太阳能电池转换效率为24.2%,为欧洲纪录[2,3]。
国内目前在太阳能板清洗技术方面,主要采用人工水冲洗、高压水枪清理方式,如图1所示。由于光伏发电厂规模较大,水资源及人工成本投入大,而且水冲洗本身以及水冲洗过后留下的污迹,会影响发电效率。
国外在太阳能板清洗技术方面除上述两种方式外,目前正在发展高性能材料与智能装备。芬兰阿尔托(Aalto)大学的研究人员于2010年11月中旬宣布,开发出一种新材料,可应用于太阳能电池,使之能制造无反射的自清洁表面,并提高太阳能电池效率[4]。但该

▲图1 人工清理和高压水枪清理

▲图2 机器人清理
*国家自然科学基金资助项目(编号:51265032)
国际合作项目(编号:2011DFR70670)
随着我国对太阳能的重视和技术的日益成熟,对太阳能板清理技术的需求也越来越紧迫。本文研究的太阳能板清理机可高效、高质量完成清理工作,充分提高太阳能板的光电转换效率,且大幅度降低工人的劳动量和减少开支,从而提高太阳能电厂的经济效益。
1 移动式清理机
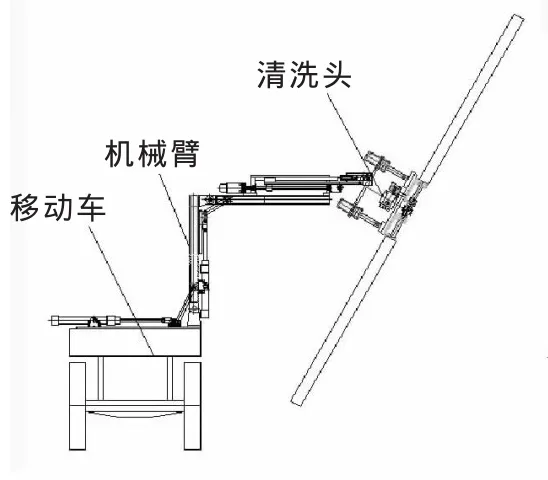
西北地区存在沙尘、暴雪、冰冻等多种特殊天气,所以灰尘、雪、冰等覆盖物是主要清理对象。本文所开发的太阳能板清理机,主要研究和解决在该种工况下的太阳能板清理问题。该设备采用喷水、洗刷和刮擦的联合作业方式,首先,通过雾化喷水装置使太阳能板表面的覆盖物湿润软化,雾化喷水方法相对于通用的高压水清洗方法可节约大量水资源,解决荒漠取水难的问题;然后,再通过尼龙制毛滚刷对覆盖物进行洗刷,尼龙丝强度适中,针对颗粒灰尘既能达到有效的清理效果,同时又能保护太阳能板避免撞击划痕;最后,通过刮板将太阳能板上的残留物和水渍一同刮除,该方式避免了以往人工反复多次洗刷,使清洗效率明显提高。太阳能板清理机的结构如图3所示。
太阳能板清理机属特种车辆与机器人技术的结合体,由于被清理对象高4 m,整机比较庞大复杂,由基础支撑、车身本体、驱动、机械手等部分组成,是集机、电、液于一体的设备。清理机机械臂各连杆是由铰链串联而成,机构具有5个自由度,包括4个旋转关节和1个移动关节。首先,通过机械臂下臂装配的气缸使下臂展开,然后,通过上臂电机带动滚珠丝杠旋转,使上臂伸出并且利用旋转轴实现清洗头的旋转,当上臂伸出指定长度后,再通过清洗头上部装配的气缸将清洗头倾斜至指定角度,使清洗滚与太阳能板表面贴合,最后启动清洗头电机带动3个清洗滚进行清洗,通过驱动小车行走就可以清洗太阳能板。太阳能板清理机的主要参数见表1。

表1 太阳能板清理机的主要参数
机械臂在非工作状态下可以完全自动收回,处于折叠状态,不会占用多余空间,方便入库,便于车辆行驶;工作状态下对不同的板面清洗时,伸展位姿可以进行高度和角度调节,使之达到最佳清洗状态。机械臂具有一定柔性,主要体现在行驶路面平整度和移动车行驶路线方面,一旦出现路面高低不平和行驶偏离既定路线,控制系统会实时调整工作位姿,使清洗滚始终贴在板面上进行清洗。移动式清理机具有可伸缩、多功能清理、防振动等性能,在现代清洗设备中具有一定的先进性。
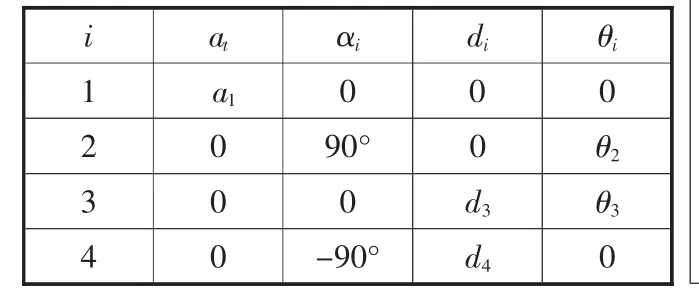
表2 D-H参数表
2 运动学分析
2.1 正运动学分析
对机械臂运动学分析,首先建立如图4所示的坐标系,使之能够达到清洗滚紧贴太阳能板的工作位姿。根据表2的D-H参数表确定齐次变换矩阵为:
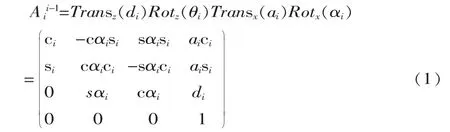
式中:si为 sinθi;ci为 cosθi;sαi为 sinαi;cαi为 cosαi;ai为Z轴之间的距离;αi为Z轴之间的角度;di为X轴之间的距离;θi为X轴之间的角度。
表 2 中其它参数为 a1=1 000 mm,-90°≤θ2≤0,-90°≤θ3≤0,1 237.5 mm≤d3≤1 967 mm,d4=113.5 mm。
当已知 q=[q1,…,qn]T时,可确定n),由连续相对运动齐次变换矩阵的求法,可得正运动学问题的解为:

此方程又称为机器人的运动学方程,代入参数可得:
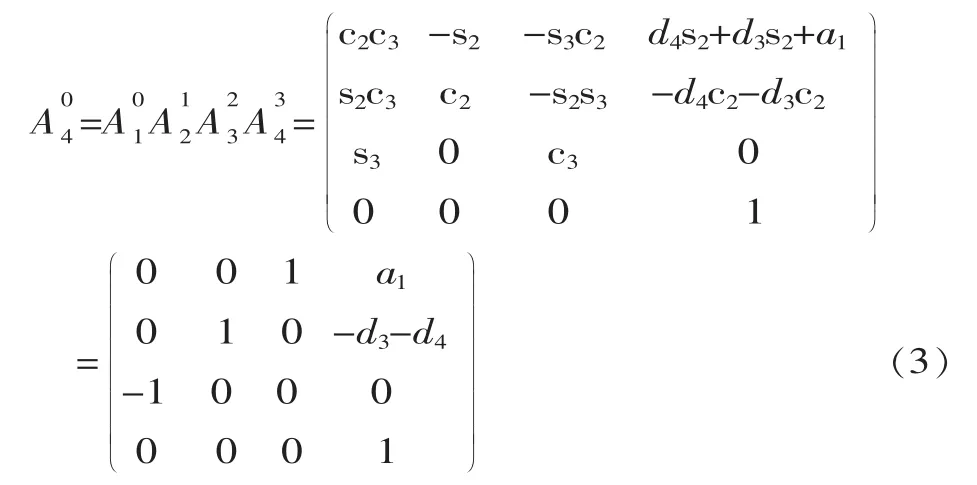
符合工作位姿要求,机械臂位姿对太阳能板可进行清洗工作。
2.2 逆运动学分析
通过机械臂的位姿可利用欧拉变换逆运动学方法来求解各个关节变量,使各个关节变量达到表2中的参数要求。
▲图3 太阳能板清理机的结构
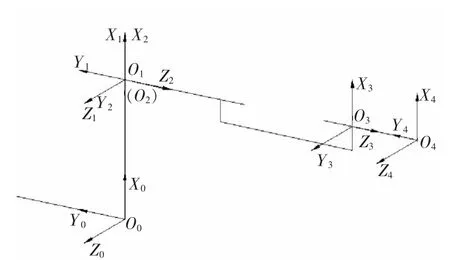
▲图4 D-H坐标系
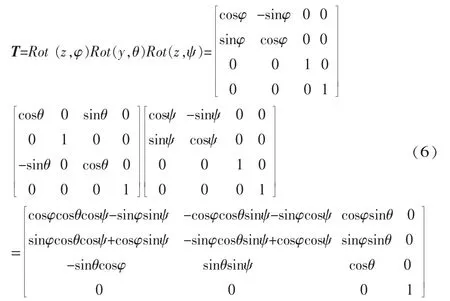
欧拉变换为:

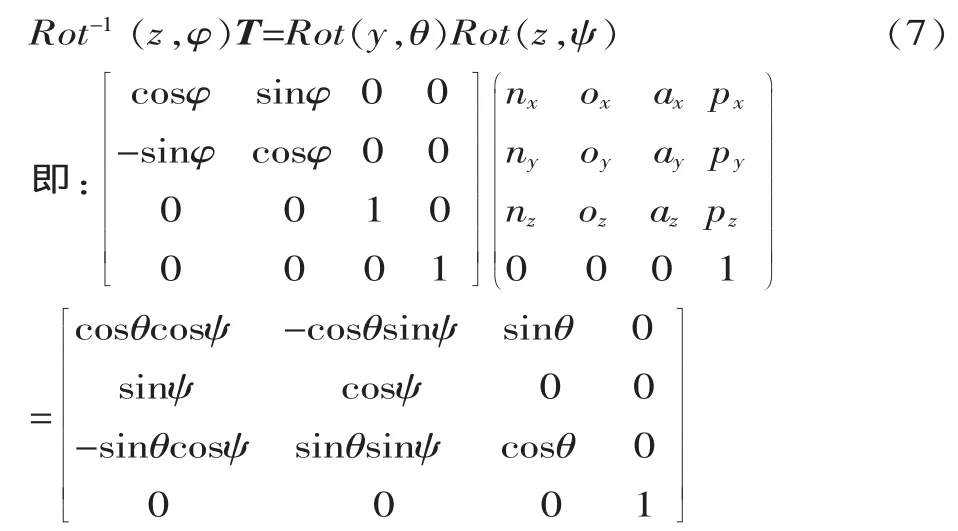
采用 Rot-1(z,φ)左乘式(6)得:
将上式写成如下形式:
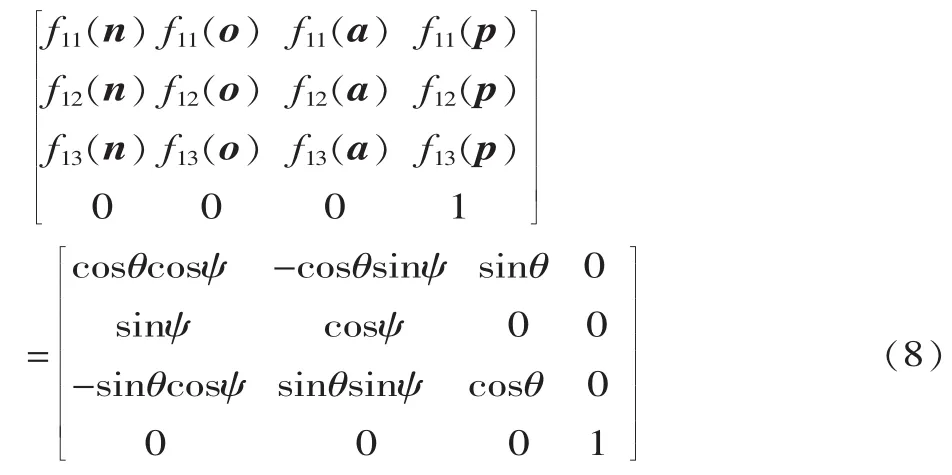

式(9)~(11)中的 x、y、z分别表示 n、o、a、p 矢量的各个分量,如:

由式(8)得 f12(a)=0,所以 tanφ=sinφ/cosφ=ay/ax或tanφ=sinφ/cosφ=-ay/-ax

上述结果相差180°,如果ax和ay都为0,则式(13)无定义,此时 φ 可任意设置,如 φ=0。
同理可求得:

至此,求出了欧拉变换的逆运动学解。
把工作位姿代入,得:
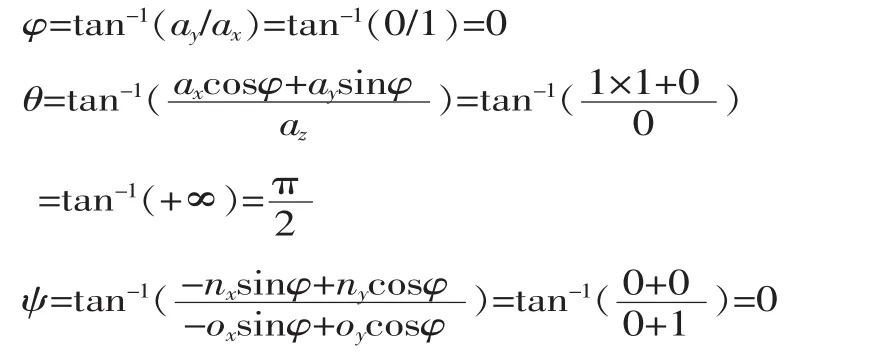
通过上述3个角度,先将坐标系0绕Z轴旋转0°, 再绕 Y轴旋转90°,最后绕Z轴旋转0°,得到坐标系4。所以,ZYZ欧拉角变换符合从坐标系0到坐标系4的转换,如图5所示,求出的角度完全符合设备的参数要求。
②缺点:制造工序多,加工工艺难度相对较大,容易产生管体裂缝;接头灌浆易开裂;管件重量大(DN1 800 mm 重量 2.30 t/m)。
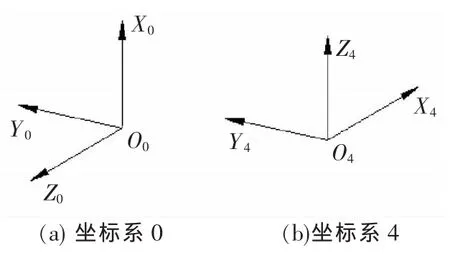
▲图5 坐标系转换
3 仿真实验及分析
Pro/E的运动仿真是先设计静态模型,然后根据实际工作状态,运行动态虚拟模型。机械臂的运动仿真可以模拟其展开与收回的全过程。设计者可以更清楚地了解整套工作过程,并验证该机构运动的合理性及各构件的协调性,为进一步优化设备提供参考。本文的运动仿真主要是针对机械臂的时间与位置,图6为运动仿真建模过程。
机械臂各结构轨迹的分析如下。
(1)下臂支撑气缸的推进与收回,使下臂连杆在平面内伸展与收回不大于90°。
(2)上臂支撑气缸的推进与收回,使上臂连杆在平面内伸展与收回不大于90°。
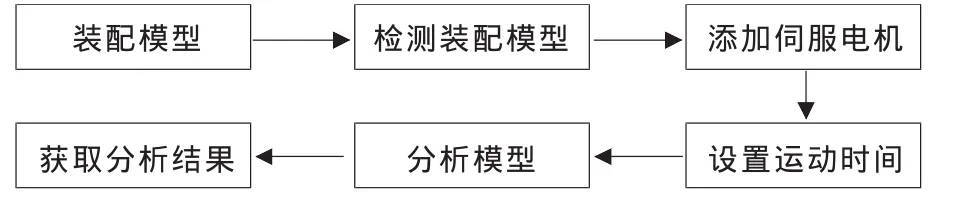
▲图6 运动仿真建模过程
(3)滚珠丝杠旋转使上臂伸出,并通过旋转轴使清洗头旋转90°。
(4)清洗头气缸的推进与收回,在上臂伸出一定长度后使清洗头倾斜不大于30°。
在Pro/E内装配完成机械臂模型后,开始设置运动时间。由于机械臂运动仿真需4部伺服电机,而且各个机构运动状态不同,电机在运动仿真过程中的先后顺序和时间设置见表3和图7。
根据仿真步骤,对太阳能板清理机进行了运动学仿真,并制作了仿真模拟动画,图8为展开动作的动画截图。
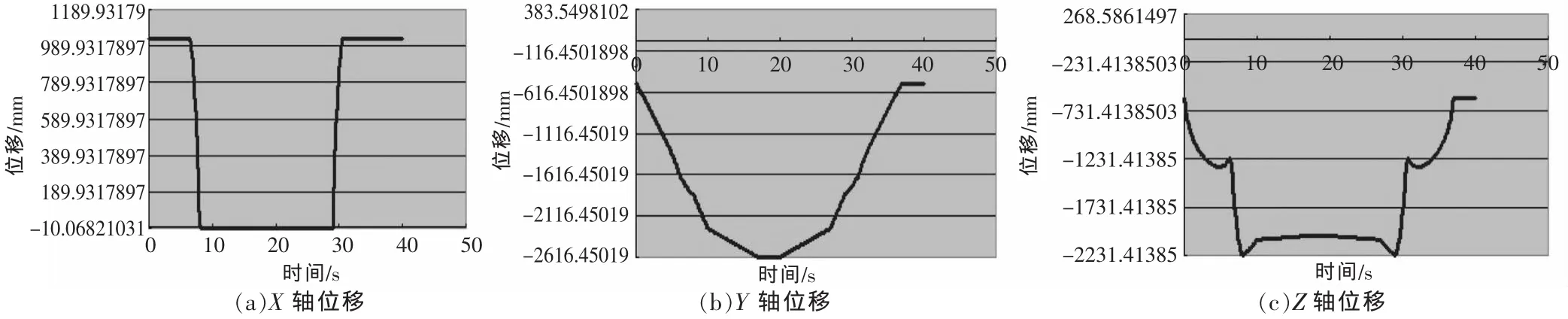
通过表2中的参数和式(1)、(2)正运动学方程得到机械臂的位置和姿态。在Pro/E仿真分析中,运动的线性轨迹如图9所示,图9中的曲线轨迹即为机械臂的展开和回收时清洗头部一点的轨迹,图10为该点在坐标X、Y、Z轴的空间位置,此运动轨迹符合机械臂的工作位姿需求。
4 结论和前景
本文研究开发了一种快速移动式太阳能板清理机,解决了当前太阳能板清理存在的问题。
在经济效益方面,按全国已规划的装机容量21 GW的电厂计算,光伏发电站每年人工成本再加上工具材料消耗、水费、管理费用等,每年可节省费用千余万元。同时由于该设备提高了清理效率,进而提高了单块太阳能板年均光电转换与发电效率,可为电厂带来较大的经济效益。本文研究的设备应用前景广阔。
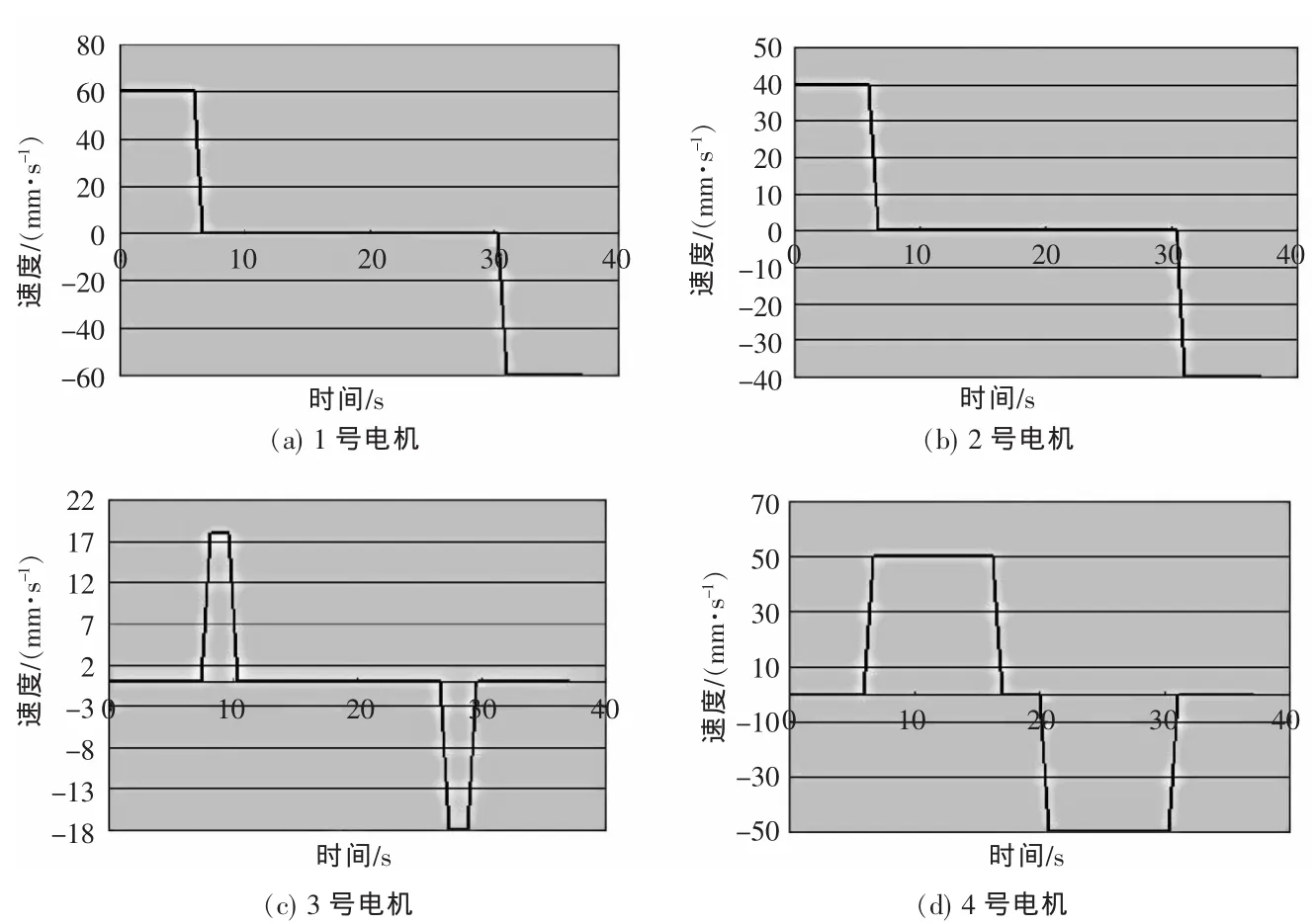
▲图7 电机参数
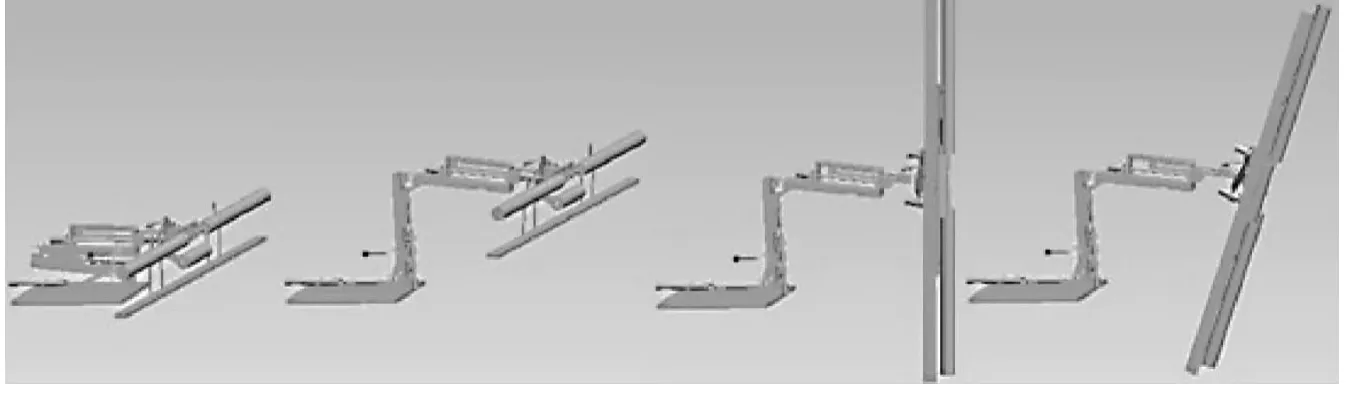
▲图8 动画截图
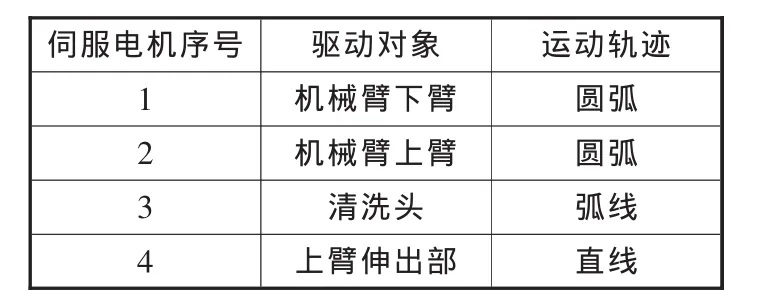
表3 运动仿真中伺服电机设置

▲图9 运动的线性轨迹
▲图10 该点在X、Y、Z轴的空间位置
[1] 刘峰,张俊,李承辉,等.光伏组件封装材料进展[J].无机化学学报,2012,28(3):429-436.
[2] N B Chaure,J Young,A P Samantilleke,et al.Electrodeposition ofp-i-n Type CulnSe2Multilayers for Photovoltaic Applications [J].Solar Energy Materials and Solar Cells,2004,81(1):125-133.
[3] Satyen K Deb.Recent Development in High Efficiency Photovoltaic Cells[J].Renewable Energy,1998,15(1-4):467-472.
[4] 塑料科技编辑部.自清洁塑料表面可以提高太阳能电池效率[J].塑料科技,2010(12):95.
猜你喜欢
中国临床医学影像杂志(2022年2期)2022-05-25
组织工程与重建外科杂志(2020年2期)2020-12-09
中国临床医学影像杂志(2019年4期)2019-06-18
中国棉花加工(2018年5期)2019-01-18
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
科技创新导报(2016年9期)2016-05-14
湖北工业大学学报(2016年5期)2016-02-27
中国棉花加工(2015年4期)2015-12-19
中国棉花加工(2015年4期)2015-12-19
