
解魔方四爪机械手结构设计与操作
2014-04-20 07:23赵洪华昃向博
机器人技术与应用 2014年5期
田 田 徐 林 赵洪华 昃向博
(济南大学机械工程学院,山东济南,250022)
解魔方四爪机械手结构设计与操作
田 田 徐 林 赵洪华 昃向博
(济南大学机械工程学院,山东济南,250022)
本文根据还原魔方基本原理,设计一种解魔方四爪气动组合机械手,阐述其基本结构及工作过程,并提出研究思路,即:利用气爪的夹持,伸摆气缸的伸缩、摆动,实现魔方的层转及整体转动,从而实现魔方还原。
机械手,解魔方,气动元件,数学建模仿真,动力学
0 引言
解魔方四爪气动组合机械手采用气动技术,以四个气动手爪为主要执行元件,通过组合运动,实现魔方的还原[1]。该机械手不仅仅是娱乐、展示类的机械手,针对其建立的实验平台,也可以对回转气缸、气动手指进行功能实验。并且,这种气动手爪组合式的快速夹持、转动,综合了多方面的技术,可以应用到基础工业、农业科技当中,具有很广阔的应用前景。
1 魔方还原原理
人们常见的魔方是三阶魔方,英文名 Rubik's cube。三阶魔方有26个块,包括:8个角块,12个棱块,6个中心块。如图1所示,6个面为黄、白、蓝、绿、红、橙6种颜色,其中黄白相对、蓝绿相对、红橙相对如图2所示,三阶魔方是一个正方体,由上(up)、下(down)、前(front)、后(back)、左(left)、右(right)6个面组成。图3为魔方转动基本公式[2]。
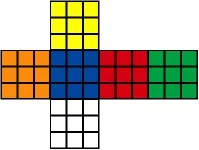
图1 魔方六面展开
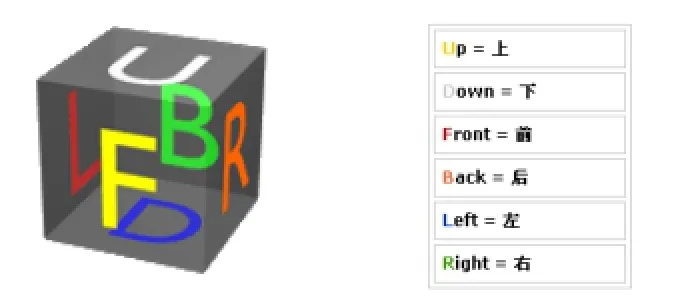
图2 魔方各面代号
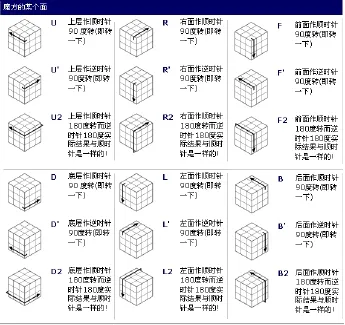
图3 魔方转动基本公式[3]
2010年7月,美国加利福尼亚州科学家利用计算机证明:任意组合的魔方均可以在20步之内还原。这个数字被称为上帝之数[4]。
2 解魔方机械手结构设计
解魔方气动组合机械手基本设计思路是利用颜色传感器或摄像头,对魔方六个面的每个色块进行扫描,并将扫描结果传入中央处理器进行计算,得出还原魔方的最优解法,再通过可编程控制器输出计算结果,执行机构即气爪收到指令后,对魔方进行翻转、单层旋转、夹持等动作,按照解法步骤,还原任意错位三阶魔方[5]。
如图4所示,气动组合机械手由以下几部分组成:平行开闭型气爪、伸摆气缸及控制箱。
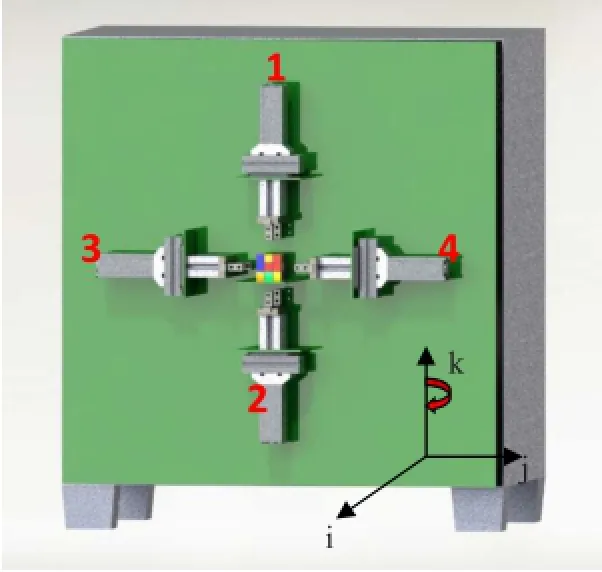
图4 解魔方四爪气动组合机械手基本结构
魔方置于控制箱前门的伸缩板上。气爪与伸摆气缸相连接,垂直等距置于魔方的上、下、左、右四个方向,分别记为爪1、爪2、爪3、爪4。伸摆气缸可以实现导杆的伸缩与180°正向、逆向旋转。当魔方需要绕k轴顺时针90°翻转时,2、3、4三个气爪平行手指打开,其所连接的伸摆气缸导杆缩回,使得三个气爪平行撤离魔方,只有爪1夹持魔方第一层中间棱块,并在其所连接的伸摆气缸作用下绕k轴顺时针翻转90°。若左面第一层旋转,则1、2两气爪撤离,爪4夹持魔方右面第一层中间两棱块,爪3夹持魔方左面第一层中间两棱块,绕i轴顺时针旋转90°。其他方向的翻转、单层旋转、夹持同理。
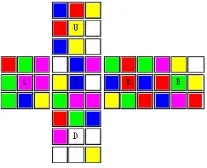
图5 还原前魔方展开六面
3 机械手操作过程
以图5为例,魔方解法:D’ L’ B’ U D’ R’ F2 U F2 D’ L2 U’ R2 U’。字符含义与图3一致。
以图4四爪结构为执行机构,其还原魔方过程如图6。

图6 解魔方四爪气动组合机械手魔方还原步骤
前置数字1、2、3、4:气爪1、2、3、4;
j:魔方绕j轴整体顺时针转动90°;j’:魔方绕j轴整体逆时针转动90°;
i:魔方绕i轴整体顺时针转动90°;i’ :魔方绕轴整体逆时针转动90°;
k:魔方绕k轴整体顺时针转动90°;k’ :魔方绕k轴整体逆时针转动90°;
G:grip 夹持;
OAR:open and reset 打开并复位;
其他字符含义与图3一致。
以第一行为例,还原过程为:爪1、爪2夹持魔方→魔方底层逆时针转动90°→爪2手指打开并复位,爪3夹持→魔方左面一层逆时针转动90°→爪3手指打开并复位,爪4夹持,爪1手指打开并复位→魔方绕j轴整体顺时针转动90°→爪1、爪2夹持,爪4手指打开并复位→魔方底层逆时针转动90°→爪4夹持,爪1、爪2手指打开并复位→魔方绕j轴整体逆时针转动90°。实现魔方的层转或整体转动为有效步骤,其他为辅助步骤。
如图6所示,在四爪还原魔方过程中,气爪打开、复位等辅助步骤增加了解算时间。因此在设计过程中,通过仿真分析,从理论方面研究气爪解算过程中的运动学、动力学性能,可以压缩辅助时间,进一步提高解算速度,并根据分析结果,对解魔方四爪气动组合机械手进行改进。
4结语
解魔方四爪气动组合机械手的设计制作是一个多种技术综合应用的过程,需要模式识别、人工智能、自动控制、电路设计、机械设计等多学科多领域的知识[6]。通过解魔方气动组合机械手的制作,将自动化作业平台所使用的各个关键技术进行实践、验证,在不断结构优化、速率调整、程序改进的过程中,达到气动组合机械手的最优状态。
[ 1 ] 蔡茂林. 现代气动技术理论与实践第八讲: 气动伺服控制. [J]. 液压气动与密封:2008(3):60-63
[ 2 ] 郑瑜. 魔方原理及其应用[J]. 中国优秀硕士学位论文全文数据库:基础科学辑,2011(S1)A002-107-1—A002-107-35.
[ 3 ]新手魔方公式图解[ DB/OL ]. http://wenku.baidu.com/view/67d369e9998fcc22bcd10df1.html.
[ 4 ] 吴季泳,郭锐,杨桂平. 一种可自主抓取魔方的智能解魔方机器人及其解魔方方法:中国:201310254999.8.[P]. 2013-06-25.
[ 5 ] 邓康一. 气动机械手的结构设计及伺服控制研究[D].西安:西安建筑科技大学机械工程,2006.
[ 6 ] 海阳,魏巍. 类人四轴解魔方机器人的设计[J].电子技术与软件工程,2013(04):62.
猜你喜欢
趣味(作文与阅读)(2021年9期)2022-01-19
作文周刊·小学一年级版(2021年36期)2021-01-14
阅读(科学探秘)(2020年8期)2020-11-06
中学生天地(A版)(2018年12期)2018-12-24
少年文艺·开心阅读作文(2018年9期)2018-09-28
风流一代·经典文摘(2018年2期)2018-02-26
广东第二课堂·小学(2017年9期)2017-09-28
民间故事选刊·上(2017年5期)2017-05-17
小学阅读指南·低年级版(2016年1期)2016-09-10
中外文摘(2015年6期)2015-11-22
