基于CATIA与ANSYS的履带机器人摆臂支撑板有限元分析
2014-06-01 10:26
中国新技术新产品 2014年2期
(吉林大学 机械科学与工程学院,吉林 长春 130022)
基于CATIA与ANSYS的履带机器人摆臂支撑板有限元分析
赫修智
(吉林大学 机械科学与工程学院,吉林 长春 130022)
本研究以有限元分析方法为基础,对比分析CATIA实体建模与ANSYS实体建模,运用CATIA 三维软件建立摆臂支撑板实体模型,运用ANSYS软件对导入的实体模型进行有限元分析。综合运用CATIA建模优势与ANSYS灵活的有限元分析处理,从而为机械结构设计提供准确的应力分析,对机械优化设计有一定的参考意义。
摆臂支撑板;有限元分析;CATIA;ANSYS
ANSYS是一款集结构、流体、热、电磁、声学于一体的大型通用有限元分析软件。ANSYS软件可进行结构分析、热分析、电磁分析、流体分析、耦合分析、优化设计、接触分析以及实现利用ANSYS参数设计语言的扩展宏命令的功能。CATIA是有法国达索公司研发的一款广泛应用于航空航天、机械制造、造船、电子等行业的三维实体建模软件。同UG、PRO/E相比,CATIA的操作界面更加直观,具有强大的三维复杂曲面造型功能,并采用了混合建模技术,使建模过程更加灵活和高效。
摆臂支撑板是履带机器人摆臂结构的重要组成部分,起到支撑摆臂,保证摆臂平稳运动的作用。分析摆臂支撑板在受载的情况下的应力情况,可以更好的改进摆臂的结构,实现机构优化设计目的。本文以摆臂支撑板为例,运用CATIA建立三维实体模型,并运用ANSYS对其进行有限元分析。与直接用ANSYS建模相比,提高了建模速度,缩短了设计周期。同时,可以将该方法应用在如装载机动臂、曲轴等复杂的结构的有限元分析工作中。
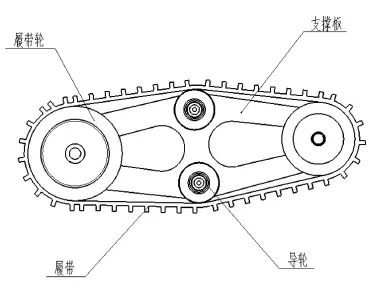
图1 履带机器人摆臂示意图
1 CATIA与ANSYS的实体建模比较
1.1 ANSYS实体建模
ANSYS提供了两种实体建模的方法:自上向下建模法和自底向上建模法。
自上向下建模法是指从一开始就从线、面、体等较高级的图元构造模型的方法。ANSYS软件在生成一种体素时,程序会自动生成所有属于该体素的关键点、线、面等较低级图元。
自底向上建模法是指由建立模型的最低单元的点到最高单元的体来构造模型的方法。也就是先创建关键点,然后利用关键点定义线、面、体等较高级图元。
除此之外,还可以用布尔运算操作、拖拉、扭转、移动、复制等操作完成实体建模。
1.2 CATIA实体建模
CATIA中创建零件三维建模的方法十分灵活,大体分为三种:先创建基础特征,然后再此基础上添加其他一些特征;由曲面生成零件三维实体模型;从装配图中生成零件三维实体模型。绝大多数的零件三维实体模型设计都采用的是第一种方法。
1.3 对比
ANSYS实 体建模存在以下几个缺点:
1)自底向上建模是在激活的坐标系上定义的,自上向下建模是在工作平面内建立的,二者不可混淆。如果混合使用两种技术,还要考虑强迫坐标系随着工作平面进行变化。这就无疑增加了建模的复杂程度,增大了设计人员的工作量。

图2 摆臂支撑板的CATIA三维模型

图3 前摆臂轮落地示意图
图4 导轮落地示意图
2)实体建模需要花费较多计算时间。
3)操作过程中不能随意的进行撤销,需要每做一步,用SAVE DB进行保存。一旦忘记保存,可能因为做错一步,而导致建模失败,甚至重新建模。
相比之下,CATIA在建模过程中可以进行多步骤撤销;进行约束建模,一定程度上省去了用输入坐标的方式建模,简化了建模过程;CATIA中形象化的图标使建模界面更直观。因此,使用三维实体软件进行建模,更利于缩短建模时间,从而缩短整个设计周期。
2 有限元分析
2.1 前处理
2.1.1 模型的建立与导入
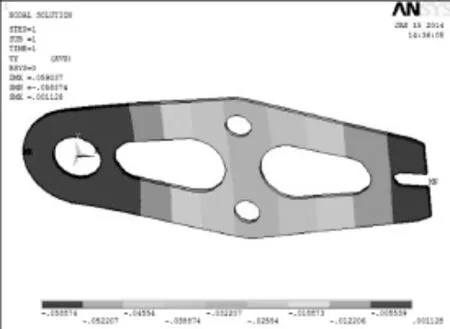
图5 导轮落地时径向位移图
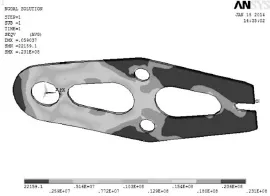
图6 导轮落地时应力云图

图7 前摆臂轮落地时径向位移图

图8 前摆臂轮落地时应力云图
利用CATIA的零件设计模块,根据摆臂支撑板的参数,进入零件设计工作平台,建立基础特征,然后逐步建立其他特征,最终完成准确的实体模型建立,如图2所示。然后将基于CATIA建立的摆臂支撑板模型导入到ANSYS中。导入后的模型不是以实体的形式呈现的,而是由线条构成的。此时可以运行PlotCtrls/Style/Solid Model Facets命令,选择Noraml Facting,然后再运行Plot/Volume命令,就可以显示体、面元素。
2.1.2 单元属性定义及网格划分
实体创建完之后,需要对实体的单元属性进行定义,它是进行网格划分的前提,其目的是控制节点以及单元体的显示特征。单元属性定义包括:材料属性、单元类型、实常数等。由于摆臂支撑板在攀爬、越障时会受到冲击载荷,所以选择的材料为低合金高强度结构钢Q345D,其屈服强度为345MPa,抗拉强度470-630MPa,泊松比为0.3,弹性模量206GPa。本文分析的摆臂支撑板为三维实体,故选择solid45进行单元类型定义即可。
进行有限元分析很重要的一步就是网格划分。网格过大会导致分析后的结果不够精确;网格过密又会增加计算时间,所以在网格划分时对划分网格的大小要有一定把握。本例中由于支撑板模型较为简单,可选择智能网格划分即Smart Size。
2.2 求解及后处理
完成前处理的工作之后,可以对模型进行求解。有限元分析的主要目的就是分析结构在一定载荷条件下的响应情况。因此,施加载荷是分析中关键的一步。在ANSYS中,载荷包括边界条件和作用力。所以在施加作用力之前,需要先对模型进行边界条件的约束。本例中,摆臂支撑板在落地时分为两种情况:前摆臂轮落地和导轮落地。如图2-2、2-3所示。
当前摆臂轮落地时,支撑板前端即图2-1中支撑板右侧开口处,受冲击载荷。图2-1中支撑板左侧与车体同轴,此时需施加约束,限制其自由度。在支撑板前端施加载荷。
当导轮落地时,导轮处受冲击载荷。同样的,需在支撑板左侧施加约束。此时,需在导轮处施加载荷。
运行Main Menu>Solution>Solve>Current LS命令,进行运算求解。求解结束后,可以查看其应力、位移等情况。由于支撑板主要受径向力的作用。所以,本例中直接输出其径向(Y向)位移和Von Mises 应力云图,如图5、6、7、8所示。
由位移图和应力云图可以看出,支撑板无论在哪种情况下受载时,其与车体同轴的孔均为受应力最大处以及变形量最大处,应力与变形量沿着支撑板向导轮一侧逐渐递减。当所受冲击载荷逐渐加大时,此处由于应力集中,容易发生较大变形,甚至断裂。在优化设计时,要充分考虑到此处应力集中问题,在保证摆臂整体轻量化的前提下,适当增加支撑板厚度;同时,适当将紧邻的加工孔远离以减小应力集中的情况。
3 结论
本文提出的基于CATIA进行三维建模,运用ANSYS软件对模型进行单元属性的定义,网格划分,求解运算以及后处理工作。相比运用ANSYS直接建模而言,很大程度上减少了建模时间,充分发挥了CATIA的建模优势,与ANSYS的求解分析功能,使分析的快速性与准确性得到统一,为大型复杂的模型进行有限元分析提供了新途径。
本例中,通过运用ANSYS对履带机器人的摆臂支撑板进行有限元分析,可以更直观的看出施加载荷后,支撑板出现最大应力与最大位移的位置,为支撑板的优化设计提供很好的参考意义;同时,综合运用CAD设计软件和CAE分析软件,也是现代设计的整体趋势,对机械结构等设计具有重要的指导意义。
[1]商跃进,王红.有限元原理与ANSYS实践[M].北京:清华大学出版社,2012,03.
[2]梁洪明,王靖岳,李学明.基于CATIA和ANSYS的货车驱动桥壳有限元分析[J].汽车工程师, 2012(10).
[3]李春旺,解武杰,杨尊袍,傅振堂,孙强.基于UG预处理的ANSYS有限元分析方法[J].空军工程大学学报(自然科学版),2009,10.
[4]阎树田,骆敬辉,姜志科.利用PRO/MECHANICA提高ANSYS有限元分析能力[J].兰州理工大学学报,2007,04.
TP24 < class="emphasis_bold"> 文献标识码:A
A
猜你喜欢
轨道交通装备与技术(2019年3期)2019-07-29
证券市场红周刊(2018年21期)2018-05-14
中国房地产业·下旬(2016年10期)2016-06-30
中国房地产业(2016年20期)2016-04-12
中国自行车·骑行风尚(2015年6期)2016-01-28
中国卫生(2014年8期)2014-11-12
轴承(2012年1期)2012-07-24
轴承(2012年10期)2012-07-21