蝶阀煤气调节系统增量式模糊PID控制器的动态特性研究
2014-06-05 15:27王志冉祥涛
山东科学 2014年5期
王志,冉祥涛
(山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
蝶阀煤气调节系统增量式模糊PID控制器的动态特性研究
王志,冉祥涛
(山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
为实现钢厂循环发电过程中对混合煤气的稳压控制,设计了应用于蝶阀压力调节系统的增量式模糊PID控制器,在MATLAB/Simulink环境下进行了动态特性仿真,并与常规PID仿真进行了对比分析。结果表明,模糊PID控制能够使该调节系统具有良好的动态特性,满足稳压系统的控制要求。
蝶阀;模糊PID;动态特性;仿真
钢厂循环发电过程中,送往燃气轮机的混合煤气气压有一个正常工作范围[1],为了实现对管道中混合煤气压力的调节,使循环发电系统稳定工作,本文设计了一套蝶阀压力调节系统。混合煤气管道系统是一个扰动剧烈、非线性强且压力调节滞后较大的系统,常规PID控制器结构简单,其控制参数是在某一特定条件下整定完成的,不具有在线整定参数的能力,难以达到理想的稳压控制要求。将智能控制领域的模糊控制和常规PID控制相结合的增量式模糊PID控制,可以实现对PID参数的在线调整[2-4],从而快速地对压力波动做出调节。本文针对钢厂循环发电过程中压力调节系统的工作要求,设计了增量式模糊PID控制器,并在MATLAB/Simulink环境下进行了动态特性仿真。
1 蝶阀调节系统简介
本蝶阀调节系统包括控制器、步进电机、双向定量齿轮泵、双螺旋摆动油缸、蝶阀以及其他液压附件(液压管、液压锁等)。
蝶阀调节系统的工作原理如图1所示。步进电机接收控制器发出的信号,驱动双向齿轮泵正(反)转供油,液压油经管道,驱动摆动油缸输出螺杆的正向(反向)回转,输出螺杆与蝶阀的阀杆相固联,从而带动蝶阀阀杆回转,调整蝶阀的开度,在蝶阀出口管道装有压力传感器,控制器通过对人工设定的压力信号和反馈信号进行分析,输出控制信号驱动电机动作,最终实现对阀后管道中流体的稳压控制。

图1 蝶阀调节系统原理图Fig.1 Schematic of the butterfly valve control system
2 模糊PID控制器原理
本蝶阀调节系统的模糊PID控制器结构如图2所示。模糊器采用两输入三输出的形式,以反馈信号与设定信号的偏差量e以及偏差的变化率ec作为输入语言变量,以PID参数的变化量ΔKp、ΔKi、ΔKd作为输出语言变量[5]。
e、ec、ΔKp、ΔKi、ΔKd的模糊集均定义为:{NB,NM,NS,Z,PS,PM,PB},分别代表负大、负中、负小、零、正小、正中、正大。输入输出变量的模糊论域取为[-6,6],均采用三角形隶属度函数。模糊规则由专家经验得出,模糊推理采用重心法。

图2 模糊PID控制原理图Fig.2 Schematic of fuzzy-PID controller
3 系统建模
整个蝶阀压力调节系统主要包括步进电机系统、泵控缸系统以及蝶阀三个子系统,下面分别对各个子系统进行建模。
3.1 步进电机系统
控制系统采用步进电机作为执行电机,考虑到步进电机的定位精度很高,认为这一环节为比例环节[6]

式中,φ为步进电机旋转的角度;Δθ为电机步距角;N为输入脉冲个数。
3.2 泵控缸系统
采用双向定量齿轮泵驱动,双螺旋摆动油缸作为执行元件,假设油液的体积弹性模量为定值,忽略管道压力损失、流体质量效应和管道动态的影响,螺旋缸输出螺杆角位移的传递函数为[7-9]


3.3 蝶阀
对于气体,根据流体连续性方程和伯努利方程可得蝶阀的流量特性方程[10]

式中,β为气体膨胀系数,也称压缩修正系数;Ks为蝶阀的结构常数;Kv为蝶阀的流量特性系数;D为蝶阀的公称直径;ρ为气体的密度;P1为蝶阀出口处的气体压力;P0为蝶阀入口处的气体压力。
等效流量Qs=Q/β,在实际过程中,由于气体的可压缩性,系统输出不能实时体现输入,因此根据系统特点在仿真过程中将等效流量环节简化为惯性环节。根据所选蝶阀样本,蝶阀的流量特性曲线近似为等百分比流量特性曲线,即Kv=Rα-1,R为蝶阀的可调比[11],并对式(3)进行拉普拉斯变换可得

式中,ΔP=P0-P1。
4 MATLAB/Simulink仿真与分析
在MATLAB/Simulink环境下建立如图3所示的仿真模型。步进电机采用时代超群公司的86BYG250-65,其步距角为1.8°;齿轮泵选用0.49 mL排量的双向齿轮泵,摆动缸选用BDA-H内径为63 mm的螺旋摆动缸,阀体选用DN50的蝶阀。气体介质根据实验室条件由空压机提供,入口压力的波动变化视为阶跃扰动,取入口压力为3.0 MPa,出口压力设定值为2.3 MPa。

图3 Simulink仿真模型图Fig.3 Simulation model with simulink
图4为常规PID与模糊PID控制下的系统阶跃响应曲线,图5为传统PID控制时的方波跟踪响应曲线,图6为模糊PID控制时的方波跟踪响应曲线。由图4可知,在允许的调节误差范围(2.3±0.05)内[12-13],采用常规PID控制时,系统的超调量为32.5%,调节时间为8.26 s;而采用模糊PID控制时,系统的超调量为12%,调节时间为4.67 s,超调量以及调节时间都有明显减小,且有效地避免了系统震荡。由图5和图6可知,模糊PID调节下的控制系统具有更好的跟踪性能,能够满足稳压系统的控制要求。

图4 阶跃响应曲线Fig.4 Response curve of step input

图5 PID控制方波响应曲线Fig.5 Response curve of PID square wave
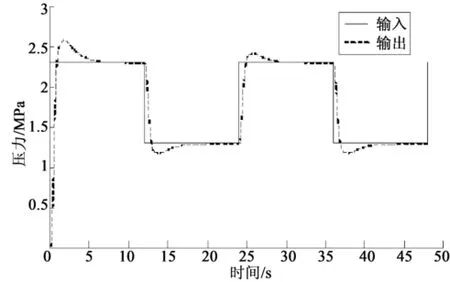
图6 模糊PID控制方波响应曲线Fig.6 Response curve of fuzzy PID square wave
5 结论
本文基于钢厂循环发电中混合煤气的蝶阀稳压控制系统,研究了增量式模糊PID控制器的动态特性。在MATLAB/Simulink环境下对本调节系统进行了动态特性仿真。结果表明,与常规的PID控制相比较,增量式模糊PID控制时,控制系统的超调量以及调节时间都有明显减小并且具有更优秀的跟踪性能,满足稳压系统的要求。
[1]王勇,谢玉东.大流量管道煤气的控制技术研究[J].山东大学学报:工学版.2009,39(2):70-74.
[2]韩成浩,赵丁选.基于自整定模糊PID控制算法的电液伺服系统设计[J].制造业自动化,2012,34(4):11-14.
[3]邢峰,张让辉,王敦富,等.模糊PID控制仿真与实验研究[J].机床与液压,2012,40(10):147-149.
[4]翟旭升,谢寿生,杨伟,等.基于自适应模糊PID控制的恒压供气系统[J].液压与气动,2008(2):21-23.
[5]黄伟,巫茜.基于参数自整定的模糊PID控制器及其应用[J].机床与液压,2013,41(6):81-86.
[6]郜立焕,褚金利,周刚,等.一种数字式多路换向阀及其PLC控制[J].兰州理工大学学报,2005,31(4):55-57.
[7]郭建宇.无阀电液伺服系统的建模与仿真研究[D].大连:大连理工大学,2005.
[8]姜继海,涂婉丽,曹健.直驱式容积控制电液伺服系统动态性能研究[J].液压与气动.2005(8):29-32.
[9]侯艳艳,曹克强,胡良谋,等.采用遗传PID整定的电液伺服系统仿真研究[J].现代制造工程.2012(5):74-77.
[10]范邦达.蝶阀流量特性系数[J].流体机械,1985(11):25-28.
[11]章威军.线性调节蝶阀的研究[D].浙江:浙江大学,2008.
[12]熊俊.混合煤气管道输送压力电液调节阀控制技术研究[D].济南:山东大学,2010.
[13]许茂林.直驱式电液调节阀稳压控制技术研究[D].济南:山东大学,2012.
Dynamic characteristics of incremental fuzzy PID of butterfly valve gas regulating system
WANG Zhi,RAN Xiang-tao
(Shandong Provincial Key Labo ratory of Ocean Environmental Monitoring Technology,Institute of Oceanographic Instrumentation,Shandong Academy of Sciences,Qingdao 266001,China)
We designedan inc remental fuzzy PID controller ap plicable to butterfly valve pressure regulating systemto stabilize pressure control of mixedgas in recyc ling power generation of steel fac tory.Dynamic charac teristics simulation was conduc tedw ith MATLAB/Simulink,which were comparedw ith traditional PID.Results show that the controller can achieve better dynamic charac teristics and satisfy control requirement for a stable controller.
butterfly valve;fuzzy PID;dynam ic charac teristics;simulation
TP137
A
1002-4026(2014)05-0042-04
10.3976/j.issn.1002-4026.2014.05.008
2014-03-23
王志(1988-),男,硕士,研究方向为系统智能控制与监测。Email:sduwangzhi@163.com
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
装备制造技术(2021年2期)2021-07-21
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
广西电力(2016年6期)2016-07-10
中国机械(2016年1期)2016-06-17
专用汽车(2016年4期)2016-03-01
探测与控制学报(2015年4期)2015-12-15
舰船科学技术(2015年8期)2015-02-27