
空空导弹红外导引头建模与抗干扰仿真
2014-06-27 05:41柴世杰李建勋童中翔樊晓光禚真福丛伟
兵工学报 2014年5期
柴世杰,李建勋,童中翔,樊晓光,禚真福,丛伟
(1.西北工业大学航空学院,陕西西安 710072;2.空军工程大学航空航天工程学院,陕西西安 710038)
空空导弹红外导引头建模与抗干扰仿真
柴世杰1,李建勋2,童中翔2,樊晓光2,禚真福2,丛伟2
(1.西北工业大学航空学院,陕西西安 710072;2.空军工程大学航空航天工程学院,陕西西安 710038)
为满足战斗机红外系统攻防对抗作战与训练的仿真需要,对多元探测器导弹攻击的全过程进行建模仿真。提出基于时域波形特征分析的目标识别建模技术,提高了导弹仿真结果的可信性。分析导弹抗干扰技术,建立导弹运动与制导通用计算模型,通过导弹的飞行速度特性和可用过载共同确定导弹运动特征,既简化了运算,又提高了精度。计算了导弹在典型攻击条件下的攻击区。通过多次计算验证,表明快速生成的攻击区特性与导弹真实攻击区特性基本一致。
控制科学与技术;红外对抗;红外制导导弹;红外导引头;抗干扰;攻击区
0 引言
自20世纪50年代第一枚红外制导的“响尾蛇”导弹出现至今,红外制导导弹已具备“灵、远、快、准、狠”的特点。由于红外技术在军事领域中的发展,红外制导导弹已成为现代战场上最有威慑力的战斗武器[1]。过去30年里,局部战争中被红外制导导弹击落、击伤的飞机占93%,雷达制导导弹仅占5%[2]。红外制导导弹是非常有效的精确制导打击力量,而导引头是精确制导武器的核心部件,其发展备受武器装备发达国家的重视。因为技术难度低、效费比高,在当前和未来一段时间内,红外导弹仍以点源型导引头为主[3],因而研究点源型导弹的建模仿真技术具有重要军事意义。
1 多元探测器建模技术
目前,世界各国广泛应用的多元探测器是四元“十”字形探测器和二元“L”形探测器。目标像点随着陀螺转子在焦平面上以角速度ω作圆周运动,造成探测器输出信号的变化。由于这两种探测器工作原理、计算方法基本相同,文中仅以四元“十”字形探测器为例,建立基于时域波形特征的红外制导导弹导引头模型。对导弹导引头建模,核心是导引头的目标识别算法。下面分析某四元探测器导弹的抗干扰识别技术。
1.1 四元探测器抗干扰技术
红外诱饵开始投放时与目标重叠,然后逐渐与目标分离。在导引头跟踪目标的过程中,如果目标波形的幅值突然增大,导引头可能处于被干扰状态,此时导引头仍跟踪幅值增大后的波形,同时记忆幅值增大前的波形。当目标与干扰分离时,导引头检测到2个波形,通过与幅值增大前的波形相比较,波形相近地认为是真实目标并进行跟踪。如果在一段时间内,导弹还未探测到2个以上的波形,说明不存在干扰,导引头恢复正常状态[4]。
导引头能够在瞬时视场内分辨出多个目标,它不再跟踪多个目标的合成质心,而是选择合适目标进行跟踪。通过对红外导引头工作机理的分析,多元红外导引头所能采取的抗干扰模式,归纳起来有以下4种:1)选通电路:选通电路是依靠变视场能力,避免红外干扰或减小红外干扰的作用范围[5]。2)运算存储电路:运算存储电路通过对目标像点的记录存储方法来区分鉴别真假目标[6]。3)幅度选择器:幅度选择器对导引头位标器接收到的目标信号幅度进行选择,实现抗干扰的作用[7]。4)弹道选择器:弹道选择器根据导引头接受到的红外信号进行速度分析,来判别接收的信号是目标信号还是红外干扰信号[8]。
运算存储电路和弹道选择器是依据目标、诱饵的运动特性进行识别判断,而幅度选择器是依据目标和诱饵的红外辐射强度进行识别判断。该型导弹是通过对目标和诱饵的运动特性、红外辐射强度识别判断达到抗干扰的功能。
1.2 四元探测器数学模型
脉冲位置和脉冲波形完全涵盖目标的时域特征,对其时域特征建立数学模型,是对该探测器进行信号处理、目标识别和导弹仿真的基础。
1.2.1 脉冲位置模型
当目标偏离光轴某一角度ε时,目标像点轨迹圆的圆心O′与探测器中心O不重合,O′与O之间的偏离量ρ与误差角ε的关系为

式中:f为导引头光学系统焦距;

φX、φY分别表示X方向和Y方向的目标信号与基准信号之间的相角差。将(2)式代入(1)式,得脉位信息
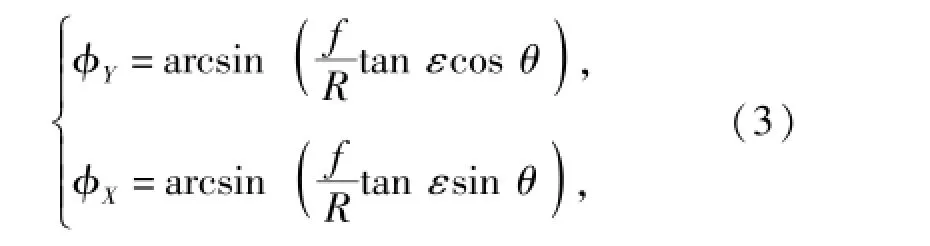
因此,求解(3)式,即可得到目标相对于探测器的误差角ε、方位角θ,式中:R为像点旋转半径;θ为OO′与四元探测器极坐标正向的夹角。
1.2.2 脉冲波形模型
目标成像于探测器的焦平面上,由于光学衍射和像差,目标成像是具有一定大小和形状的弥散圆, H是辐射源在弥散圆上的功率分布函数H(X),设辐射功率均匀分布。位标器的圆锥扫描引起目标弥散圆像点与各个探测元之间的相对运动,只有当目标弥散圆在探测器上具有投影时,探测器才能接收红外辐射能量进而产生电压信号。探测元上的辐射功率函数为

式中:S为弥散圆在探测元上的投影面积。由于S随目标弥散圆扫过探测元面积的变化而变化,因此I是时间t的函数。现以目标弥散圆扫过上元为例,建立弥散圆投射到光敏探测元面上的辐射功率I(ωt)的数学模型。
1)目标弥散圆扫过探测元的分析

图1 目标弥散圆扫过探测元示意图Fig.1 Schematic diagram of target dispersive spot sweeping detector
图1中:d为探测元宽度;ρ为探测器中心O到弥散圆旋转中心O′的距离;θρ为ρ与基准线之间的夹角;弥散圆绕其轨迹中心O′以角速度ω逆时针旋转,R为弥散圆的运动轨迹半径;r为弥散圆的半径; δ为弥散圆转过的角度(δ=ωt);φd为弥散圆通过探测元时的半圆心角。
分析目标弥散圆直径与探测元宽度的关系:当d<2R时,弥散圆在探测元中始终只有部分投影;当d≥2R时,弥散圆在一段时间里完全浸没于探测元中。将目标弥散圆扫过探测元的变化过程进行以下建模:
圆O1、O2分别是进入探测元区域和越过探测元区域时的弥散圆。当弥散圆O1在探测元上没有投影时φd=0,完全进入探测元时φd=π,且φd1、φd2分别是圆O1、O2对应的φd角。由图几何关系,得弥散圆与探测元满足的4个边界条件:
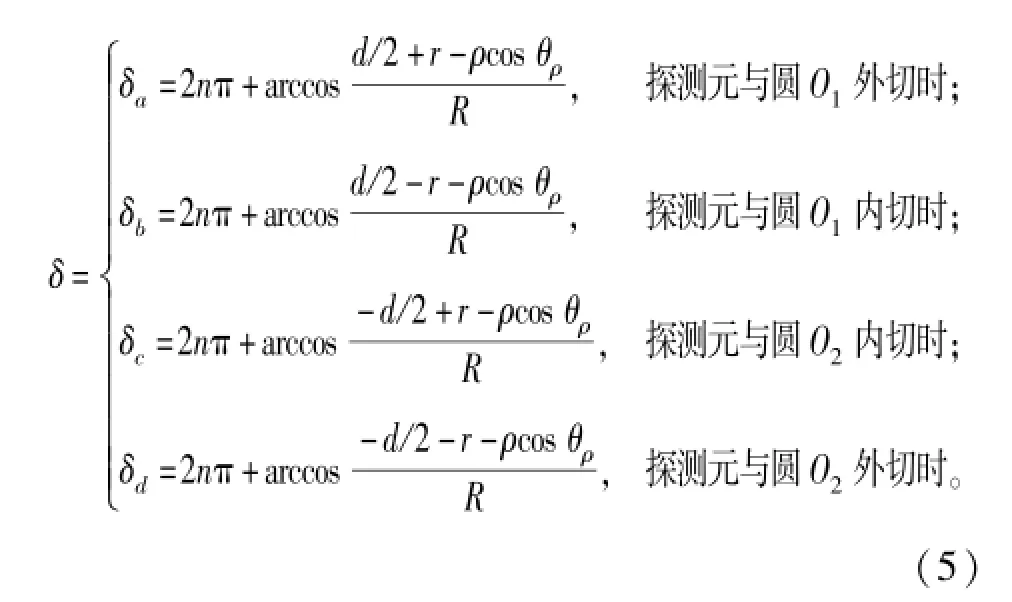
式中:n为1,2,3,….令φd1=∠CO1B,φd2=∠C′O2B′,由图的几何关系[9],得到
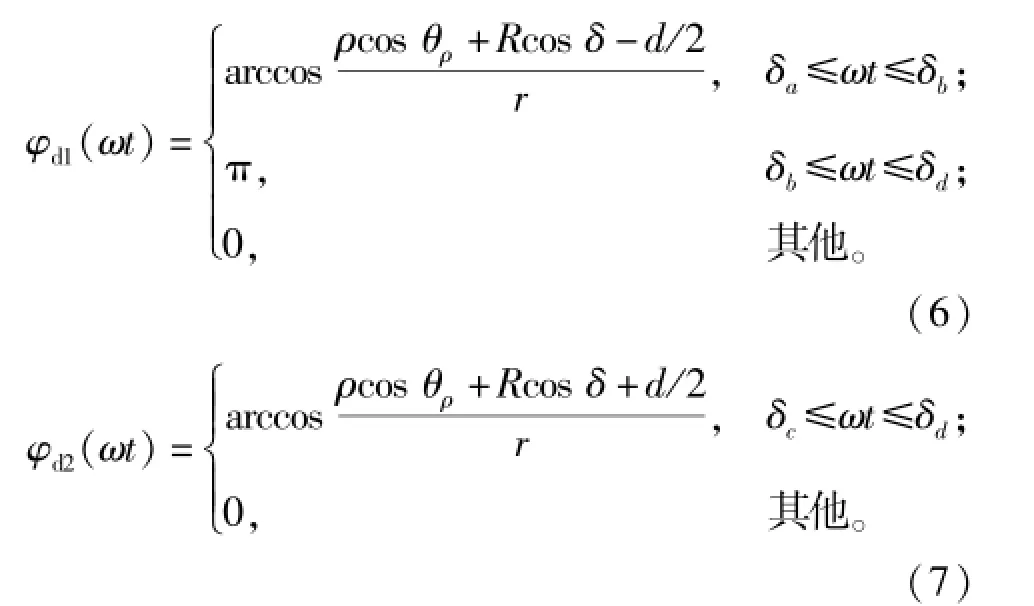
同理,由对称关系可得其他3个探测元所满足的条件及对应的φd1(ωt)和φd2(ωt),其结果类似于(5)式、(6)式和(7)式,但需要取相应的正、负号或正、余弦。
2)照射到探测元上的功率
令S1(φd1)为圆O1通过探测元最右端的弓形面积ACB,S2(φd2)为圆O2通过探测元最左端的超弓形面积A′C′B′,则目标弥散圆在探测元上的实际投影面积为

令I(φd)=∫H(X)dS,应用极坐标系,得到积分式
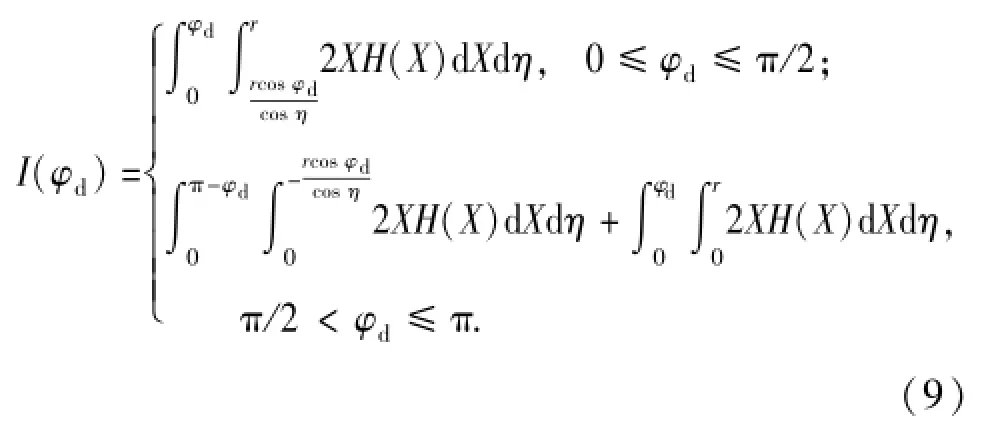
又由(8)式,弥散圆投射到探测元的辐射功率
1.2.3 基于时域特征的建模
根据四元探测器的工作及抗干扰原理,围绕以导弹导引头建模为中心,依据目标的运动、红外辐射特性、导弹的运动以及制导特性,建立基于时域特征信号分析的红外制导导弹模型。
1)坐标变换
导引头对目标的跟踪,是基于目标相对位标器的方位角。坐标系定义如图2所示,通过地面坐标系OXYZ→弹体坐标系O1X1Y1Z1→位标器坐标系O0X0Y0Z0的变换(O0X0轴为位标器光轴的方向),可以得到目标相对于坐标器的误差角ε′和方位角θ′.误差角ε′是目标-导弹矢量与O0X0轴的夹角,方位角θ′是目标-导弹矢量在平面O0Y0Z0上的投影与O0Z0轴的夹角[10]。
图2 3个坐标系示意图Fig.2 Schematic diagram of three coordinate systems
设导弹弹体相对地面的俯仰角为φg,偏航角为ψ,滚转角γ为0.位标器相对于弹体的倾角为α,偏角为β.则目标-导弹矢量在位标器坐标系OX0Y0Z0上的坐标为

式中:(TX,TY,TZ)和(MX,MY,MZ)分别为目标和导弹的地面坐标;目标在导弹位标器中的坐标为(TX0, TY0,TZ0),根据坐标系几何关系定义可计算得到目标相对于导弹位标器的误差角ε′和方位角θ′:
2)视场内目标数目
目标在弹体坐标系O1X1Y1Z1上的坐标为
式中:φp为目标相对于弹体坐标系的俯仰角;ψp为目标相对于弹体坐标系的偏航角;Ω为导弹导引头跟踪角;γ0为导弹导引头静态视场角。
如果目标在弹体坐标系O1X1Y1Z1上的坐标TX1、TY1、TZ1及误差角不满足(14)式,表示导弹丢失目标,导弹质心沿此时弹道轨迹的切线方向运动。
3)脉冲波形生成
利用1.2.2节的脉冲波形模型产生。
4)脉冲波形分离
将目标和干扰源的波形分离成随时域而变化的多个波形。
5)脉冲波形特征
计算的各个脉冲波形的特征参数如图3,特征主要包括[11]:幅值L,波形顶点的幅值;有效幅值H,波峰与波谷的差值;宽度W,3H/4处的波形宽度;相位E,波形顶点对应的相位值。
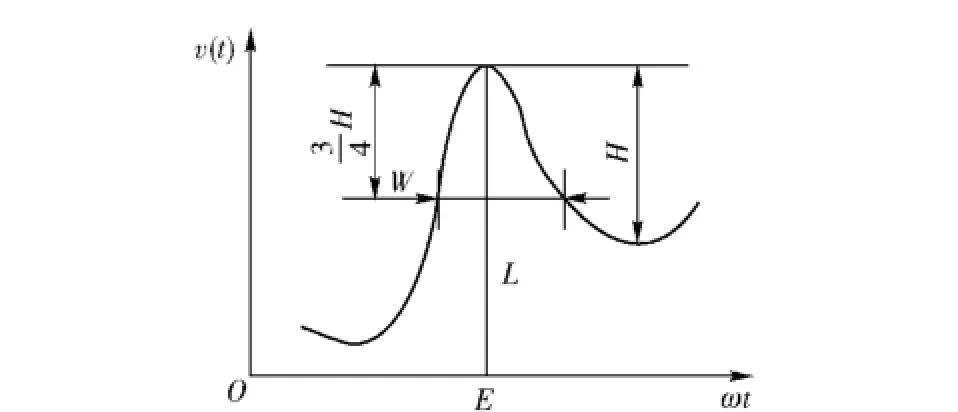
图3 波形特征示意图Fig.3 Sketch of waveform characteristic
6)识别目标
通过波形宽度W来区分背景。背景信号宽度W一般情况下大于1 ms,而远距离点目标的宽度范围在0.2~0.8 ms之间。在小能量信号的情况下,首先在以上宽度范围内选择通过门限且有效幅值最大的波形作为跟踪目标;如果没有满足以上要求的目标,再选择波形中最窄的波形作为跟踪源。在大能量情况下,只选择幅值最大的波形作为跟踪源。
在有干扰的情况下,通过记忆目标的波形特征,以此为参考波形选择目标。当某一波形与记忆波形在幅值和宽度上基本一致时,则选择该波形为跟踪源,并标识跟踪源为目标;否则仍然按照上面的方法来选择跟踪的波形,并标识跟踪源为干扰。
7)跟踪算法
根据目标相位误差输出跟踪指令,消除视线误差,实现对目标的跟踪。根据当前周期目标相位,设置下一周期的探测信号波门。波门宽度选择与目标波形的宽度、每周期目标运动的最大视线角度等有关。
8)截获判定
导弹是否截获目标要根据四路探测信号来确定,满足以下条件均可认为导弹截获目标:①至少有两路信号检测点目标;②一路信号检测到点目标,其相位偏离相应基准1/4周期以上。
9)目标方位解算
截获目标后,识别目标,确定目标波形的脉冲相位,可以得到目标的方位信息。脉冲相位反映目标的方位信息
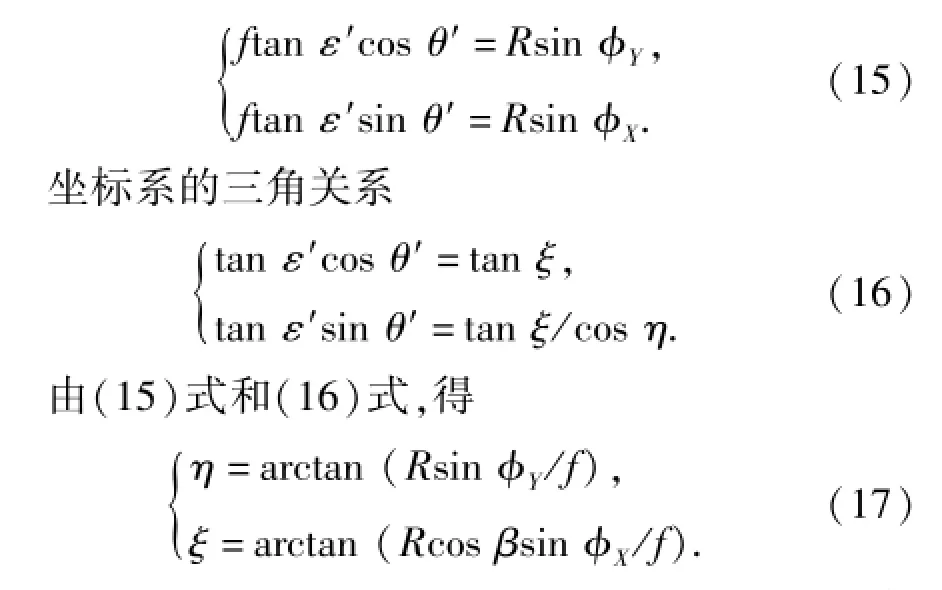
由(17)式可求得目标相对于位标器的角度信息,仰角ξ和偏角η,从而为制导系统提供方位跟踪信息。
2 导弹工作过程
导弹是红外对抗系统中的主体,红外制导导弹的工作流程如图4所示,主要包括3个工作阶段:发射前;发射后弹道中段(包括归零段飞行和控制段飞行);发射后弹道末段。
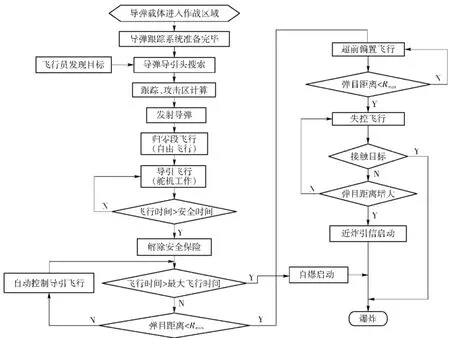
图4 红外制导导弹工作流程图Fig.4 Work flow chart of infrared guided missile
3 导弹运动与制导模型
导弹的实际运动需求解导弹的动力学方程。导弹的全量运动方程与飞机的相似,但求解动力学方程需已知导弹的各个气动导数以及舵面偏角,这些都不容易得到。仿真中采用简化方法:通过导弹的飞行速度特性图5(a)确定各个时刻的导弹速度大小(vA为导弹发射瞬间载机的飞行速度),而导弹速度的方向由导引方程和可用过载共同确定。导弹在实际飞行过程中,导弹的迎角和侧滑角数值很小,导弹纵轴几乎与速度矢量重合。因此,设定导弹体轴系与速度轴系重合。
在跟踪源确定之后,红外导引头将产生跟踪误差信号提供给控制系统,控制系统产生的控制信号符合导弹的制导规律,导弹需用过载nn
[11]如下:


在某速度MaM和质量m下导弹的可用过载nmax可从图5(b)中查到。由导引方程和(18)式得出的过载为需用过载nn.若nn∞nmax,则按导引方程确定速度的方向。

图5 导弹飞行速度和可用过载曲线Fig.5 Missile's flight velocity and available overload curve
4 导弹攻击区计算
攻击区计算分为理论计算和工程计算。理论计算是建立在对导弹运动方程、目标运动方程、火力控制方程进行求解的基础上。鉴于待解的是变参的微分方程组,参与计算的变量和参数又多,在火控计算机现有速度和容量限制下,无法实现实时计算,只能在地面大型计算机上离线进行。工程计算则是将理论计算结果进行必要的数学处理,在满足精度要求条件下,予以合理简化,通过插值算法完成实时计算和显示。
文中采用工程计算方法,核心是利用数值积分法,在各种发射条件下,给定初值、步长、精度要求,对目标、载机、空空导弹运动方程组进行数值积分,逐点求出导弹参数,再根据边界限定条件,判明允许发射导弹的空间区域,最终得到导弹攻击区。
4.1 运动方程组
计算攻击区需要多种方程组的结合。根据第3节导弹运动制导模型,建立:描述目标、载机、空空导弹相对运动几何关系的相对运动方程,也称之为攻击方程;目标运动规律假定后的目标运动方程;描述各坐标系相互转换关系的几何关系方程,也称之为联系方程;环境条件方程,指空气密度、大气压力、重力加速度、当地音速随高度变化方程等。
4.2 边界限定条件
目标、载机、空空导弹的性能、运动参数以及发射方式、发射环境条件,决定导弹攻击区的大小、形状和位置。从理论上讲,他们都有可能成为限制导弹发射的因素。实际上,空空导弹攻击区应该是各个因素所决定的空间区域的最小公共部分,而那些形成的空间区域大于或包容了攻击区的因素,实际上并不起作用,可以理解为这些因素并不存在。真正决定攻击区大小、形状和位置的只是那些关键因素,我们称之为边界条件。边界条件主要包括:1)导弹可用过载;2)导引头最大跟踪角速度;3)导引头最大偏角;4)导弹最大可控飞行时间;5)导弹和目标的相对速度;6)导弹和目标的相对距离。
4.3 目标机动方式
目标的机动由机动策略和机动过载、机动时间控制。研究表明,在视距空战中,目标机一般采用逃逸机动,即向导弹来袭反方向机动,以期能够增大导弹的射程而达到规避导弹的目的。逃逸机动可分为全程逃逸和末段逃逸,而逃逸机动中以置尾机动为最佳机动。为此,确定目标机机动为全程逃逸和末段逃逸(时间分别为5 s和10 s),机动策略为置尾机动。
4.4 仿真算例
以某型红外制导导弹为例进行计算分析,计算流程见图6.
图6 导弹最小发射距离和最大发射距离的计算流程Fig.6 Calculation flow chart of missile's minimum and maximum launch distances
1)物理量:导弹质量m(kg),气动参考面积A(m2).
2)边界限定参数:时间常数0.2 s,起控时间0.3 s,引信作用距离l(m),比例导引系数为k,弹目最小接近速度150 m/s,最大跟踪角速度60°/s,最大跟踪角75°,最大可控飞行时间tmax(s),最大可用过载40 g.
值得注意的是初始计算距离R0的选择对结果收敛性的影响很大,根据同类型导弹攻击区大小,选择的R0必须满足所设定初始攻击条件下的Rmin<R0<Rmax,否则没有结果。HM、HT分别为导弹、目标机高度,单位为m;MaM,MaT分别为导弹、目标机马赫数,nY为目标机的机动过载。本算例中,选取R0=2 000 m.
由图7、图8可以得出:当目标以不同的机动过载逃逸时,随着机动过载的增大,Rmax和Rmin都随之减小。当目标以不同的高度飞行时,随着飞行高度的增加,Rmax和Rmin都随之扩大。
由图9可以得出:当导弹初始速度具有优势时, Rmax和Rmin都会增大,随速度差的增大而增大。
由图10可以得出:当载机和目标以相同的高度时,Rmax基本上随马赫数上升而增大。
图7 目标逃逸机动(HM=3 000 m,HT=3 000 m, MaM=0.9,MaT=0.9)Fig.7 Escaping maneuver of target(HM=3 000 m, HT=3 000 m,MaM=0.9,MaT=0.9)
图8 目标逃逸机动(HM=7 000 m,HT=7 000 m, MaM=0.9,MaT=0.9)Fig.8 Escaping maneuver of target(HM=7 000 m, HT=7 000 m,MaM=0.9,MaT=0.9)
图9 目标逃逸机动(HM=7 000 m,HT=7 000 m, MaT=0.9)Fig.9 Escaping maneuver of target(HM=7 000 m, HT=7 000 m,MaT=0.9)
图10 目标逃逸机动(HM=7 000 m,HT=7 000 m, MaM=MaT)Fig.10 Escaping maneuver of target(HM=7 000 m, HT=7 000 m,MaM=MaT)
图11 目标水平匀速转弯机动(HM=3 000 m,HT=3 000 m,MaM=MaT)Fig.11 Horizontal coordinated turning maneuver of target(HM=3 000 m,HT=3 000 m,MaM=MaT)
由图11可以得出:当载机和目标以相同的高度飞行时,攻击区随机动过载增大而偏转增大。在亚音速范围内,随着飞行马赫数的增大,Rmax逐渐向上移动,范围有所扩展,但在马赫数大于1以后,Rmax反而缩小。在超音速情况下,目标作机动,将会明显缩小攻击区。
图12 目标逃逸机动(HM=3 000 m,HT=5 000 m, MaT=1.5)Fig.12 Escaping maneuver of target(HM=3 000 m, HT=5 000 m,MaT=1.5)
由图12可以得出:当导弹处于高度劣势时,目标前半球攻击区明显大于后半球,力求在前半球进行攻击,后半球最大最小攻击距离部分重合。
由图13可以得出:当导弹处于高度优势时,目标前半球攻击区最大最小攻击距离相差不大,后半球最大最小攻击区几乎重合。
利用所建模型进行导弹攻击过程仿真。取仿真步长为40 ms,探测元宽度为0.4 mm,光学系统焦距为42 mm.在导弹飞行0.4 s和0.88 s时,目标机分别以30 m/s的相对速度,垂直发射1枚红外干扰弹;载机初始坐标为(0,2 000 m,0),初始速度为250 m/s,航向角为0°.目标机初始坐标为(1 100 m, 2 000 m,0),初始速度为450 m/s,航向角为15°.导弹攻击目标过程中的弹道仿真轨迹,如图14所示。
5 结论
文中主要研究了空空导弹红外导引头的建模与抗干扰仿真,得出以下结论:
1)建立了导弹运动与制导通用计算模型,通过导弹的飞行速度特性和可用过载共同确定导弹运动特征,模型不再需要求解动力学方程以及导弹的各个气动导数以及舵面偏角的关系,与传统求解导弹六自由度运动方程模型相比,既加快了计算速度,又提高了精度,能在空战过程中进行实时计算。
图13 目标逃逸机动(HM=7 000 m,HT=3 000 m, MaT=1.5)Fig.13 Escaping maneuver of target(HM=7 000 m, HT=3 000 m,MaT=1.5)
图14 导弹攻击目标过程的轨迹仿真图Fig.14 Simulation path of missile attacking target
2)当载机和目标以相同的高度飞行时,攻击区随机动过载增大而偏转增大。当导弹初始速度具有优势时,攻击区随导弹速度的增大而增大。在亚音速范围内,随着飞行马赫数的增大,Rmax逐渐向上移动,范围有所扩展,但在马赫数大于1以后,Rmax反而缩小。在超音速情况下,随着目标机动过载的增大,攻击区随之减小。
3)当导弹具有高度优势,其允许发射距离将增大,从而能够快速形成先敌发射的有利态势。随着高度优势的增加,先敌发射导弹攻击的时间也增加。目标前半球攻击区最大最小攻击距离相差不大,后半球最大最小攻击区几乎重合。当导弹处于高度劣势时,目标前半球攻击区明显大于后半球,尽量机动到前半球进行攻击。
4)通过多次计算验证,表明该方法快速生成的攻击区的特性与该型导弹真实攻击区特性基本一致,对比导弹性能手册,攻击区准确率达到93.32%.
References)
[1] 韩国庆,刘会通,刘玉伟.飞航导弹光电对抗技术现状与展望[J].航空电子对抗,2011,27(5):1-3.
HAN Guo-qing,LIU Hui-tong,LIU Yu-wei.Present and perspectives of electro-optical countermeasures technologies of cruise missile[J].Aerospace Electronic Warfare,2011,27(5):1-3.(in Chinese)
[2] 李传良,童中翔,赵道文.对抗红外成像空空制导导弹的措施研究[J].激光与红外,2011,41(12):1355-1359.
LI Chuan-liang,TONG Zhong-xiang,ZHAO Dao-wen.Research on methods of countermining infrared imaging air-to-air missile [J].Laser&Infrared,2011,41(12):1355-1359.(in Chinese)
[3] 葛炜,曹东杰,郝宏旭.红外制导技术在精确打击武器中的应用[J].兵工学报,2010,31(2):117-121.
GE Wei,CAO Dong-jie,HAO Hong-xu.Application of IR control and guidance technology in precise attack weapons[J].Acta Armamentarii,2010,31(2):117-121.(in Chinese)
[4] 宋颖超,肖阳辉,王恩德.四元红外探测系统信号源的仿真与实现[J].弹箭与制导学报,2010,30(10):10-22.
SONG Ying-chao,XIAO Yang-hui,WANG En-de.Simulation and implementation of signal source for four-element infrared detection system[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(10):10-22.(in Chinese)
[5] 于松书,李伟仁.四元正交探测器抗红外干扰方法的研究[J].红外技术,2002,24(2):53-56.
YU Song-shu,LI Wei-ren.A study on infra-red counter-countermeasures of cross shaped detectors array[J].Infrared Technology, 2002,24(2):53-56.(in Chinese)
[6] 刘冬,鲜勇,郭飞帅,等.精确制导技术及其在武器中的应用[J].飞航导弹,2011(11):79-85.
LIU Dong,XIAN Yong,GUO Fei-shuai,et al.Precision guided technique and application in modern weapon[J].Winged Missiles Journal,2011(11):79-85.(in Chinese)
[7] 郭新军,金伟其,王霁.四元正交探测器抗红外干扰弹干扰方法综述[J].应用光学,2004,25(4):33-36.
GUO Xin-jun,JIN Wei-qi,WANG Ji.Anti jamming methods of counter-infrared-interference-missile by using cross-shaped detector array[J].Journal of Applied Optics,2004,25(4):33-36. (in Chinese)
[8] 石虎山.红外十字叉探测器的数学建模[J].计算机仿真, 2004,21(8):42-44.
SHI Hu-shan.Mathematic simulation of infrared cross-detector [J].Computer Simulation,2004,21(8):42-44.(in Chinese)
[9] 张文华,王星,叶广强.红外正交四元探测器的时域建模与仿真[J].系统仿真学报,2007,19(19):4375-4377.
ZHANG Wen-hua,WANG Xing,YE Guang-qiang.Modeling and simulation of infrared cross-detector by time domain[J].Journal of System Simulation,2007,19(19):4375-4377.(in Chinese)
[10] 张文华,张凤鸣,王星,等.基于时域特征分析的红外对抗建模与仿真[J].系统仿真学报,2008,20(4):878-881.
ZHANG Wen-hua,ZHANG Feng-ming,WANG Xing,et al. Modeling and simulation of infrared countermeasure based on time domain characteristics analysis[J].Journal of System Simulation, 2008,20(4):878-881.(in Chinese)
[11] 肖明清.导弹系统引论[M].西安:空军工程大学工程学院, 2004:20-86.
XIAO Ming-qing.Introduction to Missile system[M].Xi'an:Engineering Institute,Air Force Engineering University,2004:20-86.(in Chinese)
Modeling of IR Seeker for Air-to-air Missile and Anti-interference Simulation
CHAI Shi-jie1,LI Jian-xun2,TONG Zhong-xiang2,FAN Xiao-guang2,ZHUO Zhen-fu2,CONG Wei2
(1.School of Aeronautics,Northwestern Polytechnical University,Xi'an 710072,Shaanxi,China;
2.Aeronautics and Astronautics Engineering Institute,Air Force Engineering University,Xi'an 710038,Shaanxi,China)
For the simulation demands of fighter's combat and training on IR attack-defend countermeasure,the whole attack process of multi-unit IR guided missile is simulated.A target identification algorithm based on time domain waveform characteristics is proposed,which makes the creditability of missile simulation results improved.Anti-interference technique of missile is analyzed.A missile universal motion and guidance model is established through velocity graph and practicable over-loading,which not only simplifies the operation but increases the precision.At last,the attack region of a missile under typical assault conditions is calculated.The simulation result shows that the characteristics of fast generated attack area agrees well with characteristics of real attack area.
control science and technology;infrared countermeasure;IR guided missile;IR seeker;anti-interference;attack region
TJ 765;TN219
:A
1000-1093(2014)05-0681-10
10.3969/j.issn.1000-1093.2014.05.016
2013-05-28
国家自然科学基金项目(61203134、61172083)
柴世杰(1977—),男,讲师,博士研究生。E-mail:chaishijie@sohu.com
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
防爆电机(2020年4期)2020-12-14
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31
北京航空航天大学学报(2016年9期)2016-11-16
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
