
基于无速度传感器异步电机的风力机模拟研究
2014-07-18 11:57易文杰袁晓玲
机械制造与自动化 2014年2期
易文杰,袁晓玲
(河海大学 能源与电气学院,江苏 南京 210024)
基于无速度传感器异步电机的风力机模拟研究
易文杰,袁晓玲
(河海大学 能源与电气学院,江苏 南京 210024)
风力机模拟系统使在实验室内开展风力发电技术的各项研究成为可能。分析了风力机特性,建立了风力机模型。通过对异步电机间接磁场定向矢量控制技术的研究,考虑到安装速度传感器具有诸多缺陷,提出基于模型参考自适应(MRAS)转速辨识理论的无速度传感器异步电机的风力机模拟控制方法,并且考虑到转子时间常数对矢量控制系统的影响,采用同时辨识电机转速和转子时间常数,使系统辨识转速同时,对电机参数变化具有较强的鲁棒性。利用MATLAB/SIMULINK搭建了基于无速度传感器异步电机的风力机模拟系统,通过对风力机特性,最大风能捕获和电机参数对矢量控制系统影响的仿真,证明了系统的可行性。
异步电机;风力机;模拟;无速度传感器;转子时间常数;模型参考自适应
0 引言
作为一种清洁可再生能源,风力发电受到了广泛的关注。实验室的前期研究对风力发电技术的发展具有重要意义。但由于条件的限制,大部分实验室并不具备风场环境,不利于不同工况下风力发电系统的研究。因此,研究风力机模拟技术是非常必要的[1]。风力机的模拟是指模拟系统模拟风力机在风能驱动下输出机械功率的特性[2]。目前,主要采用直流电机或异步电机来模拟。直流电机由于其本身固有的缺点,不适于构建兆瓦级大功率实验平台。近年来,随着异步电机控制技术的不断发展,特别是矢量控制技术的应用,使基于异步电机的风力机模拟成为新的研究热点[3-4]。
在基于转子磁场定向的异步电机矢量控制的风力机模拟系统中,必须获得转子的速度和位置的信息,才能实现定子电流的解耦。目前,电机控制可以采用安装光电编码器等传感器进行速度检测,但安装在电机端的速度传感器增加了系统的成本和复杂性,降低了系统的可靠性,采用无速度传感器控制技术是解决这个问题一个很好的方法[5]。模型参考自适应(MRAS)理论是近年来发展起来并在异步电机矢量控制中得到较好应用的一种速度辨识技术,它能保证参数估计的渐进稳定性的同时对电机参数变化和外界扰动具有较好的鲁棒性,因而MRAS辨识技术在无速度传感器交流调速控制领域有很好的应用前景[5-6]。
在分析研究风力机特性和异步电机矢量控制技术的基础上,将模型参考自适应辨识理论(MRAS)引入到基于异步电机矢量控制的风力机模拟系统中,通过对模拟电机的转速和转子时间常数同时进行辨识,减小电机参数变化对模拟系统的影响,以获得风力机模拟的良好效果。仿真结果验证了所用方法的可行性。
1 风力机特性
根据Betz理论,风力机捕获的风能为[7]:
(1)
式中:P为风力机输出功率;ρ为空气密度;AT为风轮扫掠面积;vwind为风速;Cp(λ,β)为风能利用系数;λ为叶尖速比;β为桨叶节距角;ωb为风轮转速;R为风轮半径。
根据风力机从风中捕获的功率P=TTωb,可得到风力机的输出机械转矩为:
(2)
式中:TT为风力机机械输出转矩;
CT为转矩系数,CT=CP(λ,β)/λ。
根据资料的记载和研究[7],风能利用系数可近似表示为:
(3)
(4)
式中:c1=0.5176;c2=116;c3=0.4;c4=5;c5=21;
c6=0.0068
在实验室中采用异步电机代替实际风力机拖动发电机,进行模拟风力发电实验,其结构如图1所示。
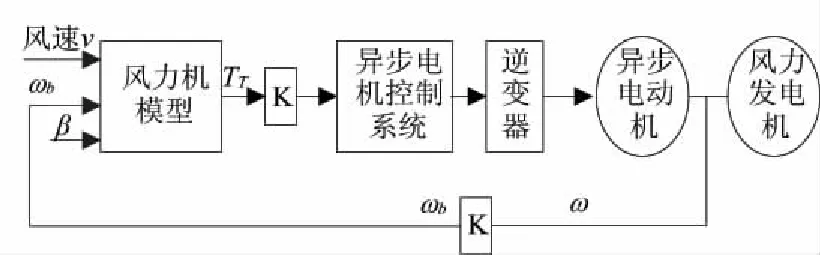
图1 风力机模拟实验平台示意图
2 无速度传感器异步电机的风力机特性模拟
异步电机是一个多变量、强耦合、非线性的复杂系统。矢量控制系统解决了异步电机的转矩控制问题,应用坐标变换将三相系统等效为两相系统,再按转子磁场定向的同步旋转变换实现定子电流励磁分量和转矩分量之间的解耦,从而达到对异步电机的磁链和转矩独立控制的目的,从而获得近似直流电机的控制性能[7]。
选取旋转坐标系的d方向与转子磁链矢量重合,则可得到异步电机模型如下:
(5)
(6)
(7)
(8)
(9)

根据式(7)可知,通过调节磁链电流isd可保证转子磁链为常数。根据式(9),当转子磁链为恒定时,此时电机转矩由转矩电流isq控制。故利用转矩电流可方便控制电机的转矩,实现风力机的模拟。
从式(5)-式(9)可知,转子磁场定向的矢量控制,关键在于获得转子磁链矢量的幅值和位置。根据式(8)可知,要准确获得转子磁链位置,就需获得转速值,目前,电机控制可以采用安装光电编码器等传感器进行速度检测,但安装在电机端的速度传感器增加了系统的成本和复杂性,降低了系统的可靠性,而采用无速度传感器控制技术能较好的解决这个问题。转子磁场定向矢量控制需要转子磁链恒定,从式(7)可以看出,如果认为转子时间常数Tr不变,则转子磁链幅值只与励磁电流有关,调节励磁电流就可保持转子磁链恒定。然而电机在实际运行过程中,转子电阻会因为电机运行温度升高而发生变化,转子时间常数不再是恒定的,如此,电机运行过程中转子磁链会因为转子时间常数的变化而发生变化,如果不对转子时间常数实时辨识与调整,将影响到矢量算法的解耦运算,从而影响到转速辨识与控制效果。因而,为获得良好的矢量控制效果,对于转子时间常数的实时辨识是有必要的。
综上分析,采用模型参考自适应法(MRAS)对风力机模拟系统转速与转子时间常数同时进行辨识,以获得良好的模拟效果,其控制框图如图2所示。
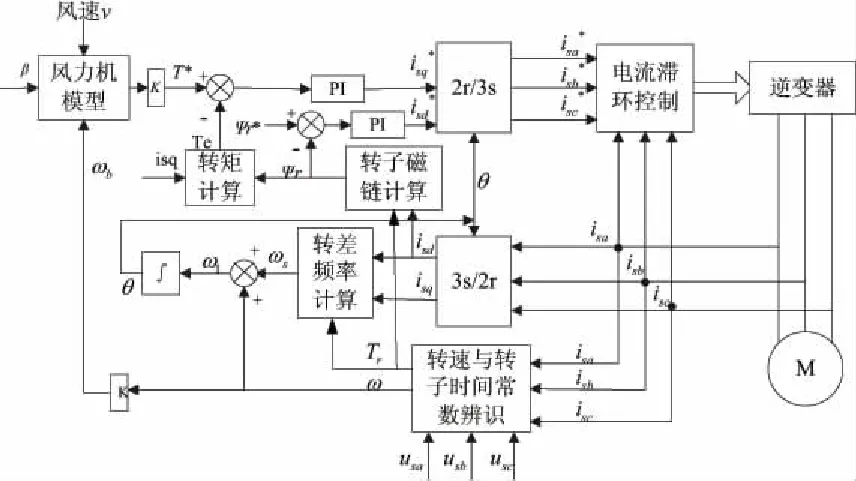
图2 无速度传感器异步电机的风力机模拟结构图
3 MRAS转速与转子时间常数辨识
首先检测出三相异步电机的定子电流和电压isa、isb、isc,usa、usb、usc,然后通过3S/2S变换求出静止坐标系中的两相电流isα、isβ及两相电压usα、usβ。由定子轴系α-β中的两相电压、两相电流,利用电流模型法和电压模型法分别估算出转子磁链,基于MRAS估算出电机转速和转子时间常数。
ψrα*=∫[τr(Lmisα-ψrα)-ωψrβ]dt
(10)
ψrβ*=∫[τr(Lmisβ-ψrβ)+ωψrα]dt
(11)
两相静止坐标系下的电压模型为:
(12)

(13)


(14)
(Lmisβ-ψrβ*)]dτ+kp[(ψrα^-ψrα*)(Lmisα-ψrα*)+
(15)
由于原始电压模型中包含纯积分项,积分初值和累计误差都会影响计算结果,为避免这一情况,可以采用低通滤波器代替纯积分环节,而改进的电压模型相当于在原始电压模型加上一个高通滤波环节,为平衡同时带来的磁链估计的相位误差,在电流模型中引入高通滤波环节,改进后的模型参考自适应结构图如图3所示。
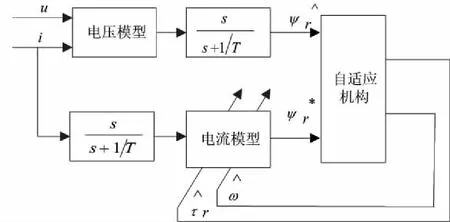
图3 改进后的模型参考自适应结构图
4 仿真研究结果
用于模拟的风力机参数为:额定功率为15kW,叶轮半径为R=4.3m,最大风能利用系数为Cp=0.48,最佳叶尖速比为λ=8.1,空气密度为ρ=1.25kg/m3,定切入风速为3m/s,切出风速为20m/s,额定风速为11m/s,齿轮箱变速比N=7.846。异步电动机参数如下:额定功率P=22kW,额定电压为U=380V,额定频率为f=50Hz,转子电阻Rr=1.322Ω,定子电阻Rs=1.253Ω,转子自感Lr=0.1776H,定子自感Ls=0.1744H,互感Lm=0.1697H,转动惯量J=0.02kg·m2,极对数n=2,摩擦系数为0.0058,给定参考磁链为Φ=1Wb。PI调节器的参数整定为:转矩调节器Kp=540,Ki=110;磁链调节器Kp=0.1575,Ki=30。
根据图2控制框图,在Matlab/Simulink平台上,通过建立风能模型、风力机模型、异步电机模型、异步电机矢量控制系统模型、基于MRAS辨识电机转速与转子时间常数数学模型、等效发电机模型,构建基于无速度传感器异步电机的风力机模拟系统的仿真模型。
4.1 风力机特性模拟
分别在风速为5m/s和6m/s测得风力机转矩转速曲线、含速度传感器的异步电机模拟风力机的转矩转速曲线、无速度传感器异步电机模拟风力机的转矩转速曲线分别如图5、图6、图7所示。从3幅图可以看出在无速度传感器情况下,基于MRAS辨识的转速与转矩关系,和风力机在高速轴上输出的转速与转矩关系一致,可知采用基于无速度传感器异步电机矢量控制能较好地模拟实际风力机特性。
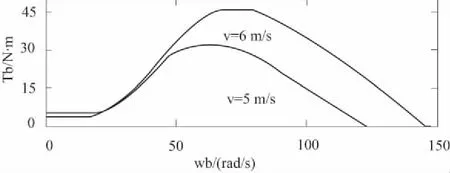
图5 风力机转矩与转速曲线图
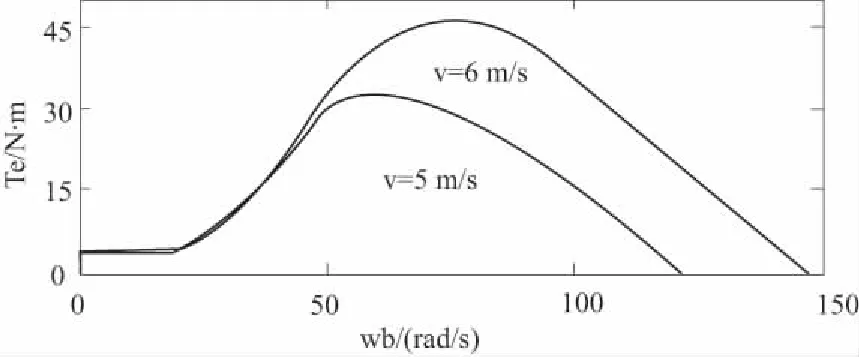
图6 含速度传感器的电机模拟的转距与转速曲线图

图7 无速度传感器的电机模拟的转距与转速曲线图
为使基于无速度传感器异步电机模拟系统的运行状态与实际风力机一致,并验证风力机模拟系统在实际运行中的稳定性,利用搭建的仿真模型对模拟系统最大功率点跟踪运行状态进行仿真。本文对异步电机施加可以实现风力机最大功率捕获的负载,图8、图9、图10反映最大功率点跟踪下,风能利用系数、含速度传感器的电机实际转速、无速度传感器情况下基于MRAS辨识的转速的仿真结果,2s前风速为7m/s,2s时风速变为9m/s。图8反映是在无速度传感器情况下通过0辨识转速实现系统模拟的风能利用系数曲线,风能利用系数一开始是增加,很快达到最大值0.48并保持稳定,在2s时风速突变,风能利用系数短暂调整后稳定在0.48,实现最大风能捕获,基于MRAS辨识的转速与电机实际转速一致。结果表明无速度传感器异步电机模拟系统能实现实际风力机最大功率跟踪运行特性的模拟。
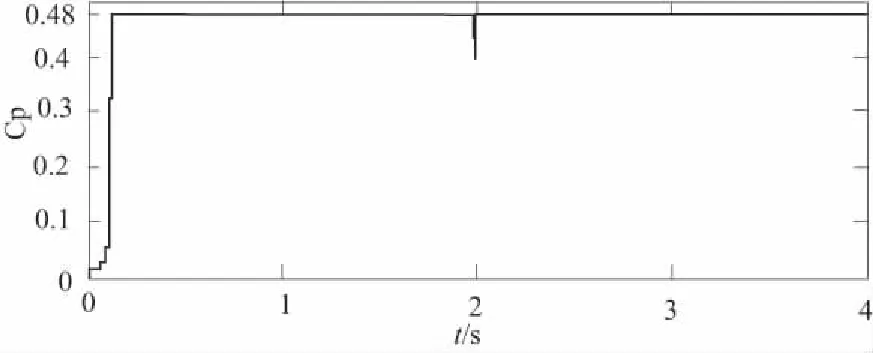
图8 风能利用系数响应

图9 异步电机模拟系统的实际转速
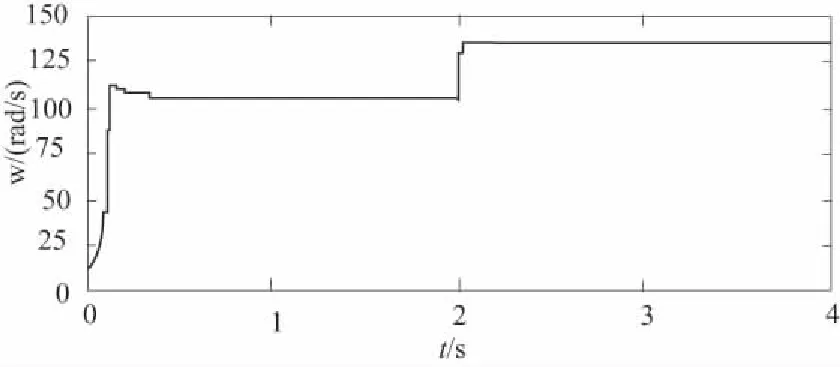
图10 基于MRAS的模拟系统转速辨识值
4.2 转速与转子时间常数同时辨识的风力机特性模拟
图11、图12、图13反映的是风速为5m/s,转子电阻在2s时增大50%即电机参数发生变化,模拟系统的仿真结果。图11在2s前基于MRAS辨识的转子时间常数Tr已稳定在0.1343,在2s时转子电阻增大50%,转子时间常数很快稳定在0.08953符合理论值。图12实线反映的是基于MRAS同时对转子时间常数和转速实时辨识下,模拟系统的转速辨识值;虚线表示的是未对转子时间常数实时辨识情况下,转速辨识值。可以看出由于同时辨识转速和转子时间常数,因此电机参数变化时,转速仍然能稳定在最大功率点跟踪下风力机实际转速,而转子时间常数未实时辨识时,转速则不能稳定在最大功率点下转速即在这种情况下模拟的转速就不是实际风力机的转速,如此可知实际运行过程中电机参数会发生变化,对转子时间常数的辨识是非常重要的。图13是模拟系统模拟的实际风力机转矩,可知转子时间常数在2s变化时,系统模拟风力机的转矩在一段时间调整后仍然能稳定在实际风力机输出转矩。
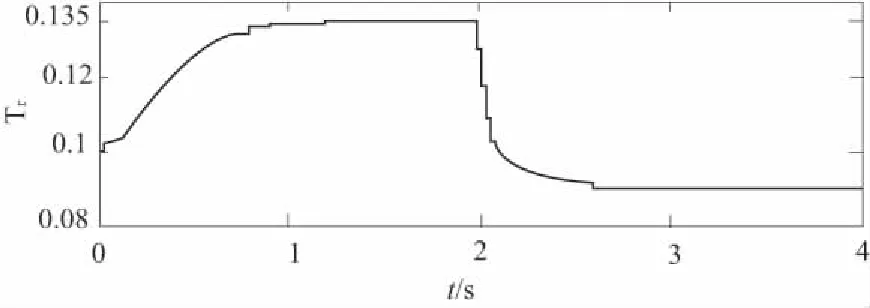
图11 基于MRAS的转子时间常数辨识值
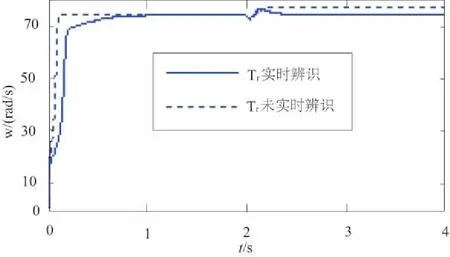
图12 基于MRAS的模拟系统的转速辨识值

图13 基于MRAS的异步电机模拟风力机的转矩
5 结论
在分析风力机特性和异步电机矢量控制基础上,通过将模型参考自适应理论引入到基于无速度传感器异步电机矢量控制的风力机模拟系统中,提出了模拟系统实现的方案,并通过对转子时间常数的辨识,解决在电机参数变化时对模拟系统产生影响的问题。仿真结果表明方案能够较好的辨识出转速与转子时间常数,实现异步电机较准确地模拟实际风力机特性,证明系统设计的可行性。
[1] 王超,黄文新,王前双.基于异步电机的风力机特性模拟[J].电力电子技术,2010,44(6):7-9.
[2] 叶远茂,吴捷,张先亮,等.变桨距风力机分区模拟方法及其控制策略[J].电网技术,2010,34(1):159-163.
[3] 王前双,胡育文,黄文新.风力机模拟技术综述[J].电机与控制应用,2010,37(3):1-6.
[4] 乔明,林飞,孙湖,等.基于异步电机的风力机模拟实验平台的研究[J].电气传动,2009,39(1):40-43.
[5] 秦涛,吕跃刚,肖运启,等.基于模型参考自适应的无速度传感器双馈风力发电机组控制技术研究[J].现代电力,2008,25(4):64-70.
[6] 周亚丽,李永东,郑泽东.基于MRAS的感应电机无速度传感器矢量控制[J].电气传动,2009,39(4):3-8.
[7] 姚春光,潘卫明,徐殿国,等.基于鼠笼式异步电机的风机模拟实验平台研究[J].电力电子技术,2010,44(6):23-25.
[8] Ahmad Razani Haron, Nik Rumzi, Nik Idris. “Simulation of MRAS-based Speed Sensorless Estimation of Induction Motor Drives using MATLAB/SIMULINK”, First International Power and Energy Conference PECon2006,pp.411-415, (November 28-29, 2006).
[9] 张艳存. 异步电机矢量控制系统的参数辨识研究[D].长沙:中南大学硕士论文,2008.
Simulation of Wind Turbine Based on Speed-sensorless Control Strategy of Induction Motor
YI Wen-jie,YUAN Xiao-ling
(College of Power and Electrical Engineering, Hohai University, Nanjing 210024,China)
Wind turbine simulator(WTS) is an important device for developing wind energy conversion systems. Its use makes the evaluation and improvement of wind power generation technology in laboratory possible. A wind turbine model is built up through the research of the wind turbine characteristics. Then the indirect flux field oriented vector control strategy is studied. Because many defects exist in fixing speed sensor on induction motor, a speed-sensorless vector control scheme based on model reference adaptive system(MRAS) for wind turbine simulation of induction motor is proposed. Taking into account the impact of the rotor time constant on the vector control system, the paper simultaneously adopts identification rotor speed and time constant. The speed can be estimated accurately by the system, which system shows strong robustness to variation of motor parameters. At last, In MATLAB environment, the simulation system for wind turbine emulation based on speed-senseless control strategy of induction motor is designed. Through the simulation of wind turbine properties, maximal wind energy capture and the influence of parameter variation on vector control system,in indicates that the system is feasible.
induction motor;wind turbine simulation; speed-sensorless; rotor time constant; MRAS
易文杰(1987-),男,湖北荆门人,硕士研究生,研究方向为现代交流调速技术。
TM315
A
1671-5276(2014)02-0060-05
2013-02-24
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
重型机械(2019年3期)2019-08-27
电子制作(2018年1期)2018-04-04
电子制作(2017年23期)2017-02-02
焊接(2015年1期)2015-07-18
物探化探计算技术(2014年1期)2014-06-27
组合机床与自动化加工技术(2014年10期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01
河南科技(2014年24期)2014-02-27
