机载激光捷联惯导系统动态误差的影响分析
2014-07-20 05:47张卫侠张立峰刘中平
中国惯性技术学报 2014年3期
张卫侠,张立峰,刘中平,钱 渊
(1.中航工业陕西飞机工业(集团)有限公司,汉中 723200;2.中航工业西安飞行自动控制研究所,西安 710065)
机载激光捷联惯导系统动态误差的影响分析
张卫侠1,张立峰2,刘中平1,钱 渊1
(1.中航工业陕西飞机工业(集团)有限公司,汉中 723200;2.中航工业西安飞行自动控制研究所,西安 710065)
激光捷联惯导系统中传感器由于直接与载体固联,同时还存在激光陀螺抖动振动,使系统误差特性较平台式系统更复杂,振动对系统动态误差影响更大。针对某型激光惯导系统随载机试飞中长航时精度超差的问题,分析了振动诱导误差的形成机理,查明了长航时精度超差的原因是由于惯导部件与其安装支架连接后的产品谐振频率与飞机螺旋桨叶通过频率耦合所致,为此提出了降低惯导部件内减振器带宽、提高载机惯导部件安装支架刚度的改进措施。经完善激光惯导系统算法,实施改进措施后,试飞考核,系统精度达标,从而验证了措施的正确性。
捷联惯导;激光陀螺;振动;动态误差
激光捷联惯导系统以其精度高、可靠性高、价格低、维护简单等一系列优点,率先在我国航空机载领域获得试用,并很快推广到航天、航海、陆用等领域。目前,某型飞机应用的主导航系统先前采用的挠性平台惯导系统已经全面被激光捷联惯导系统代替。
捷联惯导系统由于传感器直接安装在载体上,失去了平台惯导系统中物理平台对载体运动包括振动的隔离,造成载体振动环境对捷联惯导系统的影响远大于平台系统,使系统在设计中,不仅需要考虑传感器自身的误差特性及补偿措施,同时,还需要重点考虑由于捷联架构所带来的新问题,包括虚拟物理平台由于受限于计算机能力、传感器噪声、抖动等因素所放大的尺寸效应误差、圆锥误差、划船误差等。这些误差目前主要的消除方法有两种,一是传感器安装台体的设计过程中,需要认真考虑二频机抖陀螺所特有的抖动干涉、支撑中心与重心的动静合一、减振器的合理选取等因素;二是选择恰当的误差补偿模型及计算逻辑,在可接受范围内,降低对计算机计算能力的要求。科学应用上述措施,均可消弱外界环境的振动对系统导航性能的影响。
通过大量的工程实践,设计人员已经清楚地认识到振动能级大小对系统精度的影响,在实际实施过程中,惯性导航系统安装位置往往是飞机总体应优先考虑的问题之一,一般应远离振动源,如运8系列飞机使用的激光捷联惯导系统其惯性导航部件多安装在离振动源约5 m远的机身中段地板下。施加给导航系统的振动大小往往取决于两个因素,一是振动源输出振动能级的大小,二是从振动源到目标之间的传播路径对振动的放大程度。特别是振动放大往往带有随机特性,很难进行实际测量,当放大的频率进入到系统减振器带宽范围内,尤其是和谐振点相近时,会对系统性能造成较大影响,而后者往往是飞机总体设计过程中容易忽略的地方,也是许多地面与空中测试性能不一致的主要原因。
本文提及的某机载激光捷联惯导系统在地面各种模拟环境下均表现正常,满足设计要求,但在随载机试飞考核过程中,其纯惯性长航时导航性能不达标。首先在分析并进一步完善误差的算法和补偿方法的基础上,通过ANSYS分析和地面模拟测试表明,惯导位置和速度精度超差的原因是惯导部件与其安装支架连接后的产品谐振频率与飞机螺旋桨叶通过频率耦合。采取降低惯导部件内部减振器带宽、提高惯导部件安装支架刚度的措施后,经飞行验证,系统精度满足要求。
1 影响激光捷联惯导系统的振动误差和补偿分析
根据捷联系统理论,在不考虑传感器本身误差的情况下,系统主要误差是由 “捷联”所引起,本惯导重点研究的误差有尺寸效应误差、圆锥误差和划桨误差。
1.1 尺寸效应误差
系统设计中,一般采用三个单轴加速度计分别测量空间相互垂直的三个方向比力,在工程实现中,三个加速度计的安装位置往往与系统质心不重合,在运动情况下,加速度计将会敏感到附加的切向加速度和向心加速度,即有害加速度,在进行导航解算时,如果不进行补偿,将会产生原理性“尺寸效应”误差[1]。尺寸效应见图1,其中,rp为测量中心与系统质心之间的位置矢量,为载体转动角速率,根据动力学原理,此时,P点将存在向心加速度和切向加速度。

图1 尺寸效应分析示意图Fig.1 Schematic drawing of dimension effect analysis
系统尺寸效应误差表示为:

即系统的尺寸效应大小由安装几何中心偏离质心的距离和角运动大小决定,无论减少哪个参量,均可减少尺寸效应的影响。由于角运动往往代表载体实际的运动特性,不能减少,在实际系统设计中,主要从两个方面解决:一是设计加速度计安装位置时,应通过ANSYS等分析工具,实现精确建模,减少物理空间上质心和几何中心的不重合度;二是通过误差补偿方式,消除尺寸效应。补偿公式如下:

式中,△α表示尺寸效应误差增量,△θ(t)表示t时刻陀螺输出角增量,T表示尺寸效应补偿周期。
对于不同的机型,随飞机构型不同,其转动轴中心也在发生变化,对于运输机,其变化量一般在10%以内。当飞机航向轴角运动为40 (°)/s,三个加速度计的安装位置往往与系统质心误差为0.5 m,则由尺寸效应引起的加速度误差约为25 mg。该项误差可通过标定和补偿得到抑制。
1.2 圆锥误差
当刚体在两个正交轴方向作频率相同的角振动时,第3个正交轴将在空间绕其平均位置作锥面或近似锥面的运动,这种运动称为刚体的圆锥效应。由于陀螺可感受该运动,当系统计算带宽有限以及惯性器件本身误差等因素存在时,捷联系统中特有的数学平台将不能完全隔离这种角运动,从而诱发垂直轴上的直流分量,并在姿态更新计算中产生测量误差,该误差即为圆锥误差[2]。根据捷联惯导理论可推导出,圆锥误差为:

由圆锥误差公式可知,其误差大小与圆锥运动大小密切相关,除采取必要的算法补偿外,减少圆锥运动也是降低圆锥误差的有效途径。。
随着系统计算周期的减小,圆锥误差会越来越小。但在实际系统中,由于计算机性能等因素的限制,计算周期不可能无限小,提高圆锥误差补偿算法精度和提高计算频率是相互矛盾的,应用旋转矢量的多子样算法[3]和根据参量变化速率的双速算法,即高速部分补偿圆锥误差,低速部分完成姿态四元数的更新[5]。当采用合适的多子样算法后,可有效降低系统误差。

表1 多子样算法效果比较Tab.1 Comparison of multi-sample algorithm effects
一般在计算能力允许情况下,采用四子样算法对振动环境下性能改善较为明显,对于运输机类载体,也可采用双子样。采用何种算法,除取决于产品计算能力外,也取决于载体的运动特性以及误差分配,需综合考虑。
对捷联系统而言,减振器的设计尤为重要[6],振动对系统的影响在实际应用中应首先考虑[7]。本文提及的机载激光捷联惯导系统中,除算法改善外,通过降低减振器带宽,避免了振动之间的耦合与叠加,减少了台体圆锥运动。减振器带宽调整前后的响应谱线见图2(a)、2(b)。
1.3 划桨误差
当载体沿纵轴作线振动的同时又沿横轴作同频角振动时,会在载体的垂直轴方向产生速度整流量,即划桨误差,也称为划船误差[2]。对于捷联系统,尤其是二频机抖系统,线振动、角振动必然同时存在,即划桨误差是一种常态化的误差项,其大小如下:

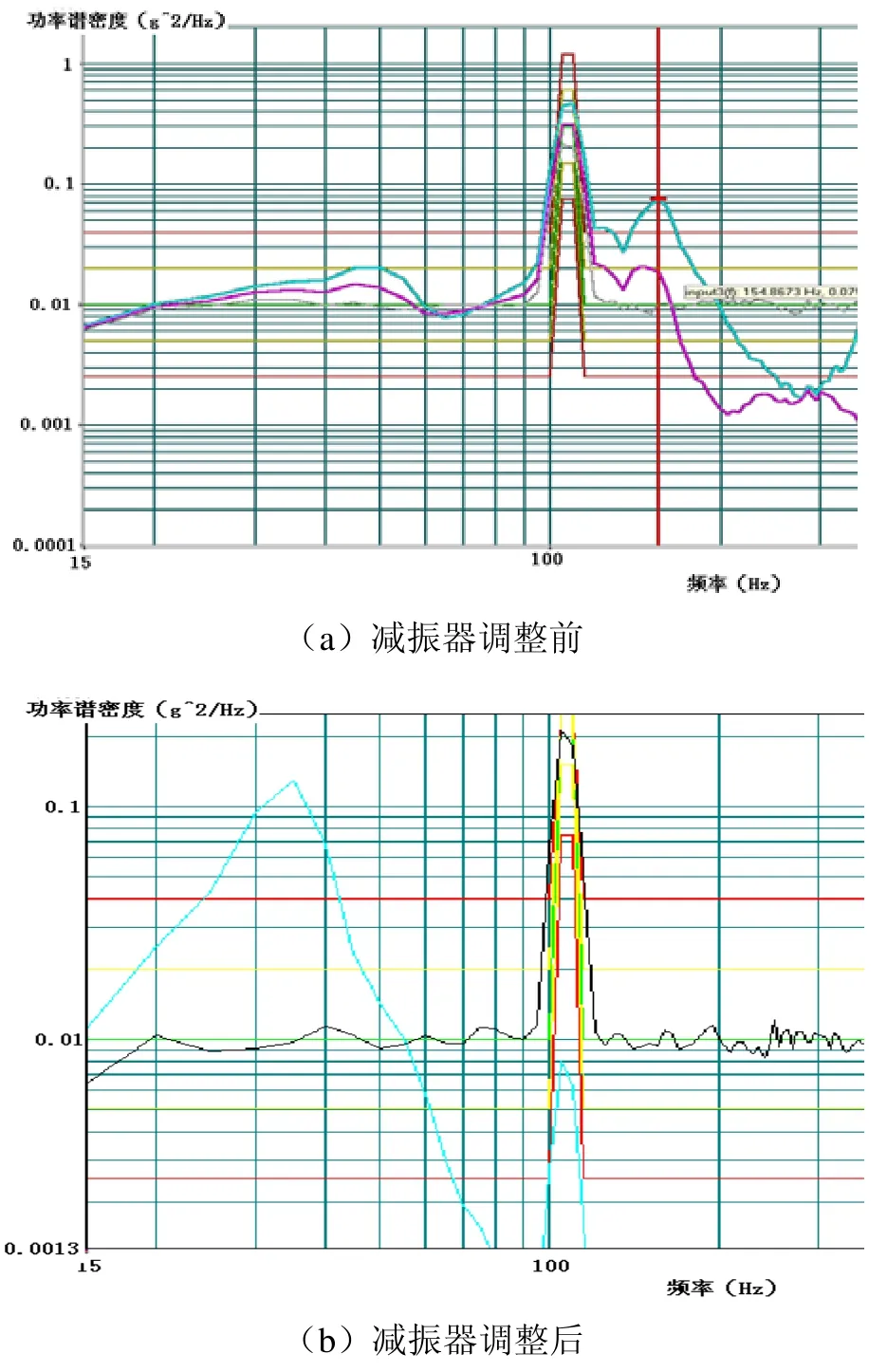
图2 减振器调整前后振动响应谱线Fig.2 Spectral line of vibration response before&after vibration absorber regulation
由于陀螺和加速度计输出的是角增量信号和速度增量信号,所以无法直接按式(5)计算划桨效应补偿项。一般多采用对速度计算周期内的角速度和比力采用线性和抛物线拟合,从而得到划桨效应的补偿算法。
假设载体呈现划桨运动,频率为50 Hz,运动的角振幅θx假定为0.1°,同时相对于垂直轴的周期性加速度假定在Ay之间变化,此时,Ay=10g;若姿态更新频率为400 Hz,最终的加速度误差是8.7 mg;采用不同的算法,加速度误差最终补偿效果不同,见表2剩余误差。采用四子样算法可使系统具有更强的抗扰动能力。
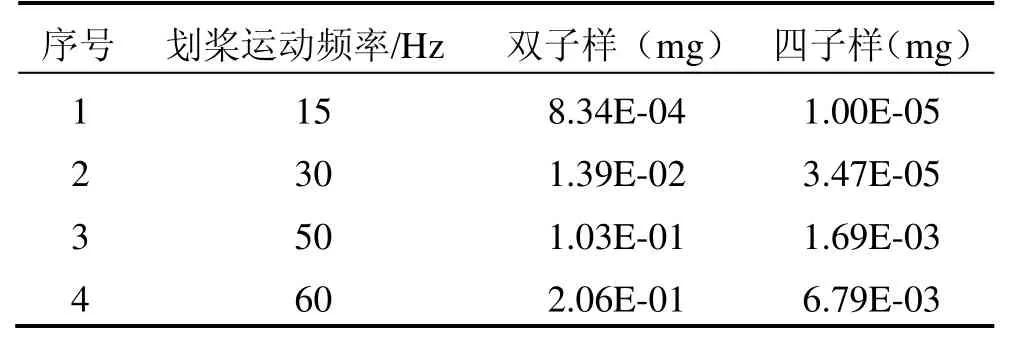
表2 多子样算法补偿效果比较Tab.2 Comparison of multi-sample algorithm compensation effects
1.4 小 结
引起激光捷联系统振动条件下的上述系统误差,主要是由于传感器安装环境存在角运动和线运动误差,因此,在系统设计中,需认真分析这些误差并研究高精度的各种误差补偿算法。但这些算法的研究和改进,还未能从根本上解决性能超差的问题。经过反复分析和振动测试,认为对激光惯导在飞机上的应用,更应注意减少有害运动输入的量级,从而降低对计算机运算速度的要求。在如何减少产品本身有害运动影响,不少承研单位从对台体动态分析[4]和减震器设计[8]等方面做了大量研究,并获得了许多有益的技术途径。但在如何降低有害运动的研究中,目前主要研究内容大多集中在产品本身的设计过程中,往往忽略了在装机过程中对惯导的有害运动的研究及控制,而这些因素有时成为特定情况下系统性能下降的主要因素。
2 安装环境对激光惯导系统性能的影响分析
2.1 惯导部件安装情况
某型飞机配备两套改进型激光捷联惯导系统,其中两件惯性导航部件(含托架)安装在飞机中段离振动源约5 m远的地板下设备架上,如图3所示。具体安装形式为:惯性导航部件安装于惯导部件托架上,惯导部件托架通过厚度为15 mm的过渡底板安装在飞机结构型材上,从而保证惯性导航部件与飞机机体可靠连接。

图3 产品机上安装示意图Fig.3 Schematic drawing of production installation onboard
2.2 安装环境对系统性能影响分析
该机载激光捷联惯导系统在地面各种模拟环境下均表现正常,满足设计要求,但在多次随载机试飞考核中,安装于1#和2#两个位置的激光捷联惯导系统其纯惯性8 h长航时试飞位置和速度误差均超标,且1#位置惯导系统误差更大,不能满足使用要求。现仅以1#位置惯导进行分析。从统计数据来看,系统性能超差具有较好的重复性。通过系统性能影响误差树分析,并通过地面多次静态、动态测试,确认产品本身特性满足要求。在测试中发现,惯导部件内部减振器带宽与飞机螺旋桨通过频率(107.5 Hz)比较接近,加之机上安装支架的谐振频率过低,使机上振动在低频段有较大放大,惯导部件与机上安装支架连接后的产品谐振频率与飞机螺旋桨通过频率耦合,导致附加的干扰角运动和线运动出现,捷联惯导易敏感的各类振动误差产生,造成系统性能下降。因此,需对惯导部件内部减振器带宽进行调整,以避开螺旋桨通过频率与系统频率耦合,并对安装支架进行优化设计,以提高刚度。安装支架改进设计具体措施为:将惯导部件安装型材(12~13框)由两根改为三根,同时,在13框、14框处各增加两根型材将支架与地板横梁固连,在13框处增加一根型材对支架进行加强。
支架优化前后具体如图4(a)、4(b)所示,图4(b)中带引注的零件示意为加强型材。图中未示出支架与机体结构的连接。

图4 支架优化前后示意图Fig.4 Schematic drawing of before &after the bracket optimization
2.3 惯导部件安装支架固有特性计算
通过对惯导支架优化设计前后的固有特性进行计算分析,对12至14框设备支架进行了有限元模拟,以plate板单元模拟了全部支架,支架上的设备简化为集中质量单元,使用刚体元模拟了设备的安装,有限元模型见图5(a)、5(b)所示。
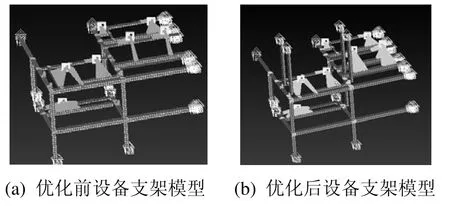
图5 优化前后设备支架模型Fig.5 Equipment bracket module before &after optimization
使用nastran2007对12至14框设备支架更改前后低于200 Hz的固有频率及模态进行计算,共得到六种与惯导有关的固有模态,计算结果见表3,固有频率对比见表4。
载机安装支架优化后,各模态的频率均明显增加,接近螺旋桨通过频率的主振型模态由2个减少为1个,不存在接近螺旋桨桨轴旋转频率的固有模态,安装支架刚度提高,减小了安装支架的振动,从而使系统性能得到了较大改善,体现出地空性能的一致性,且改进设计后支架重量增加仅1.2 kg,对全机重量重心无影响,不影响飞机飞行安全和相关设备的正常工作。
综上所述,通过完善激光惯导系统算法,同时采取降低惯导部件内减振器带宽和提高载机惯导部件安装支架刚度的改进措施后,经长航时试飞考核,系统精度按GJB 729-1989统计,达到了GJB 4859-2003规定的位置误差不大于2.0 n mile/h(10 h内,95%CEP)、水平速度误差不大于的0.8 m/s(RMS)的指标要求,从而验证了措施的正确性,解决了系统长航时性能超差的问题。
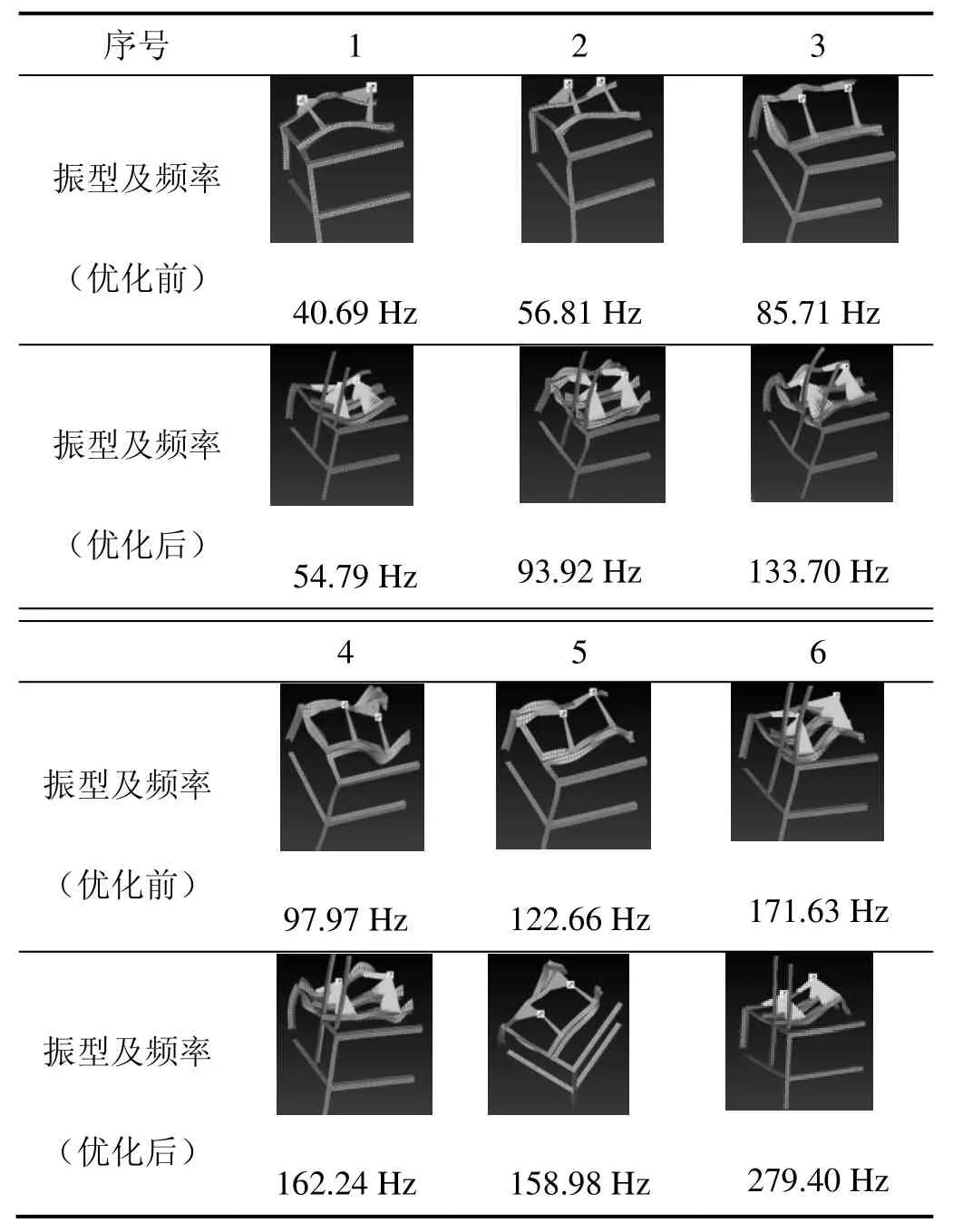
表3 支架优化前后与惯导有关的固有特性对比Tab.3 Comparison of natural characteristic relative to inertial navigation before &after the bracket optimization
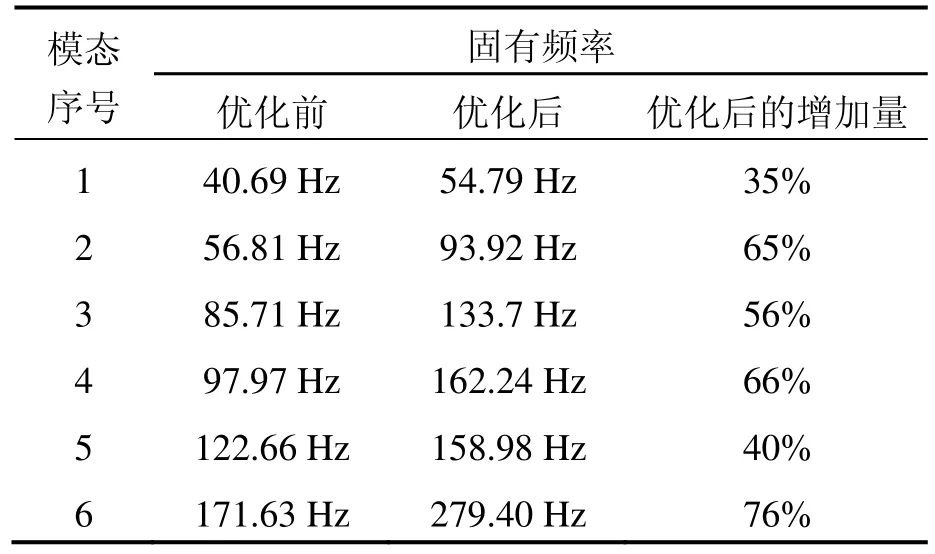
表4 优化前后固有频率对比Tab.4 Comparison of natural frequency before/after the optimization
3 结 论
目前激光捷联惯导系统普遍采用二频机抖陀螺,同时由于计算机特性限制等原因,在产品设计过程中,除需研究高效高精度的各种误差补偿算法外,特别需要注意减少引起误差的有害运动量值。通常需从内外两方面考虑:内部需注意陀螺频率的错频以及支撑中心和重心的重合,减振系统在完成减振的同时,应避免引起额外的角运动;外部需注意产品安装支架谐振频率,在可能条件下,谐振频率应远离减震器带宽。只有对产品从设计到使用各环节进行统筹考虑,才能最大限度地提高导航系统性能。
(References):
[1]谢波,秦永元,万彦辉.激光陀螺捷联惯导系统误差补偿技术[J].中国惯性技术学报,2010,18(2):142-148.XIE Bo,QIN Yong-yuan,WAN Yan-hui:The error compensating technical of laser tyro strap-down inertial navigation system[J].Journal of Chinese Inertial Technology,2010,18(2):142-148.
[2] 秦永元.惯性导航[M].北京:科学出版社,2006:287-381.
[3]杨朋军,孟进录,张天孝.捷联惯性测量组合台体组件设计与分析[J].宇航学报,2010,31 (1 ):162-165.YANG Peng-jun,MENG Jin-lu,ZHANG Tian-xiao,strap-down inertial composite station assembly.Design and analysis[J].Journal of aerospace,2010,31(1):162-165.
[4]张志鑫,张大伟.捷联惯组减振系统角振动、线振动共振频率理论分析[J].中国惯性技术学报,2009,17(6):654-657.ZHANG Zhi-xin,ZHANG Da-wei.Resonance frequency theory analysis of angle vibration and linear vibration of strap-down inertial assembly vibration damping system[J].Journal of Chinese Inertial Technology,2009,17(6):654-657.
[5]Zhang Lundong,Lian Junxiang,Wu Meiping,et al.Research on auto compensation technique of strap-down inertial navigation system[C]//International Asia Conference on Information in Control,Automation and Robotics.2009:350-353.
[6]Savage P G.Strap-down analytics[M].2nd Ed.Strapdown Associates,Inc.,Maple Plain,Minnesota,2007.
[7]Kirn K,Lee T G.Analysis of the two-frequency coning motion with SDINS[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit,6-9 August 2001.Montreal,Canada,2001.
[8]TUO Zhou-hui,HU De-wen,LI Ru-hua,WEI Jian-cang.Damping design of strap-down inertial navigation system[J].Journal of Chinese Inertial Technology,2009,17(6):648-650.
Dynamic error effect analysis of airborne laser strap-down inertial navigation system
ZHANG Wei-xia1,ZHANG Li-feng2,LIU Zhong-ping1,QIAN Yuan1
(1.AVIC Shaanxi Aircraft Industry Corporation LTD.,Hanzhong 723200,China;2.AVIC Xi’an Flight Automatic Control Research Institute,Xi’an 710065,China)
In laser strap-down inertial navigation system,the sensor is directly connected to carrier and the laser gyro has dither and vibration,so the system error properties become more complex and the vibration has a larger influence on system dynamic error compared with the platform type system.Aiming at the long-endurance out-of-precision-tolerance of a certain laser inertial navigation system of an aircraft during flight test,this article analyzes the formation mechanism of vibration induction error, finds out that long-endurance out-of-precision-tolerance is caused by the coupling of resonant frequency from the product formed by connecting inertial navigation component with its mount support and aircraft propeller blade frequency,and put forward the corrective measures:reducing the band width of vibration absorber in inertial navigation component and improving the mount support rigidity of aircraft inertial navigation component.After perfecting laser inertial navigation system algorithm,taking the corrective measures and testing flight,the system precision meets the requirement,which validates the correctness of the measures.
strap-down inertial navigation;laser gyro;vibration;dynamic error
U666.1
A
1005-6734(2014)03-0306-05
10.13695/j.cnki.12-1222/o3.2014.03.006
2014-01-16;
2014-05-06
总装预研基金(102080501);航空基金(20100818015)
张卫侠(1971—),女,高级工程师,从事航空电子系统综合设计工作,致力于综合导航应用研究。E-mail:175284303@qq.com
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
装备制造技术(2020年4期)2020-12-25
汽车维修与保养(2020年11期)2020-06-09
制造技术与机床(2019年7期)2019-07-22
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11