
五轴数控系统旋转运动学通用建模及处理方法*
2014-07-21 12:51段舒文郑飂默孙树杰
组合机床与自动化加工技术 2014年8期
段舒文,林 浒,郑飂默,孙树杰
(1.中国科学院研究生院,北京 100039;2.中国科学院 沈阳计算技术研究所,沈阳 110168)
0 引言
五轴联动数控系统在当今精密工件的加工中发挥着举足轻重的作用,可以用于加工诸如螺旋桨、涡轮叶片、螺旋锥齿轮[1]等质量要求高、曲面复杂的精密工件。在实际加工过程中,用G 代码可以较容易的得到刀位数据文件,然则由于机床种类多,运动链各不相同,所以由刀位数据文件求解机床轴运动数据成为后置处理的难点[2]。本文对三大类机床进行建模,给出一种简单通用的求解方法,克服常规后置处理中坐标变换的两大缺点:第一,常规后置处理主要针对旋转矢量是特殊矢量的情形,而不是任意的空间矢量;第二,少数后置处理模型可以处理任意空间矢量,然而反解运动学方程困难,不利于编程实现[3]。
1 五轴机床旋转运动通用模型
五轴机床按照旋转坐标实现方式的不同,可以分为三类:双摆头机床,双转台机床,混合型机床。每一类机床又可以根据主动轴、从动轴的选择不同,可分为六种,然而其中两种机床的实现无意义,所以有四种机床。比如,双摆头机床有BA,AB,CA,CB(前面的字母表示主动轴)这四种。对于每一类机床的四种具体类型机床,其运动学的模型基本相同。本文针对每类机床建立其各自对应的运动学模型。
1.1 齐次运动变换
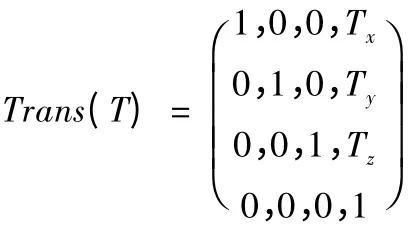
平移运动变换Trans[4]:
Trans(T)表示沿向量T进行的平移变换。定义如下:
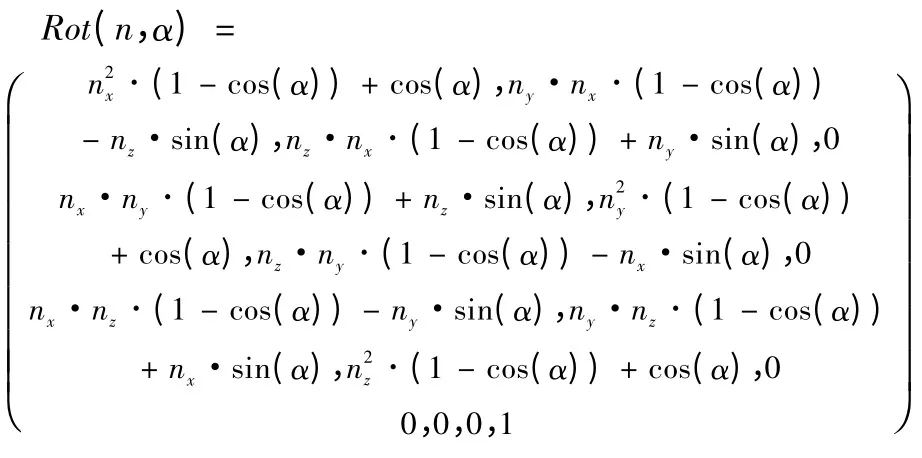
旋转运动变换Rot[5]:
在实际的生产加工中,有时会用到斜旋转轴的数控机床。这就造成当旋转轴进行旋转的时候,所绕的向量可能并不是[1;0;0]或[0;1;0]或[0;0;1],而是任意的空间向量n。在此,定义矩阵Rot(n,α)为绕任意向量n旋转角度α 的旋转矩阵。定义第一旋转轴旋转矢量为n1,旋转角度为α;第二旋转轴旋转矢量为n2,旋转角度为β。
矩阵Rot(n,α)的定义如下:
1.1 摆头类机床的运动学模型
Ow为机床坐标系;Ot为刀具坐标系,其中刀具方向不一定为Zt方向,所以用矢量v1=[i1;j1;k1;0]来表示。O1、O2分别为刀具第一旋转中心坐标系和刀具第二旋转中心坐标系。Ow、Ot、O1、O2这四个坐标系相互平行。向量T1、T2为O1、O2、Ot之间的偏移。向量T为编程坐标系下机床各直线轴的运动矢量。变换后的刀具方向用向量v2=[i2;j2;k2;0]表示。

图1 双摆头五轴机床及其运动链示意图
根据图1 所示双摆头[6]五轴机床和坐标系对应关系,可得如下的正向运动学方程:

由于刀具方向与平移运动无关,则方程可化简为:

1.2 转台类机床的运动学模型
根据转台类机床运动学特点,同理可得如下运动学模型:

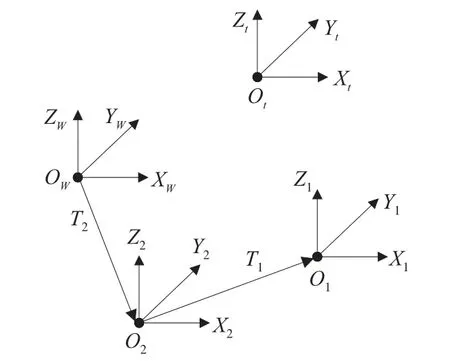
图2 双转台机床示意图
方程可化简为:

1.3 混合类机床的运动学模型
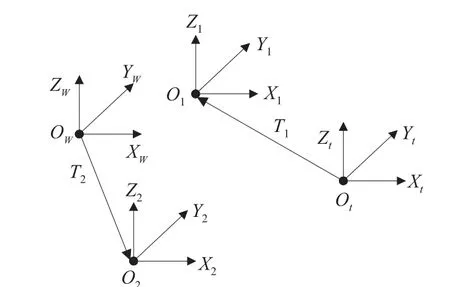
图3 混合类机床示意图
根据混合类机床运动学特点,同理可得如下运动学模型:

方程可化简为:

2 反解运动学方程
由三类机床的运动学模型及式(1)、(2)、(3)可知,在反解旋转运动学方程中,即已知刀具方向在变换前和变换后的方程矢量v1=[i1;j1;k1;0]和v2=[i2;j2;k2;0],以及两个旋转轴的旋转矢量n1=[x1;y1;z1]、n2=[x2;y2;z2],求两个旋转角度α,β,即是求解方程:

矩阵RotT(n,α)定义为矩阵Rot(n,α)的转置。
可以 验 证,Rot(n,α)·RotT(n,α)= E,则Rot(n,α)为正交矩阵。所以式(4)可变形为:

根据式(5),可得方程组:

其中:
方程组可由Gauss 消元法[7]解得。然而在方程有解的情况下,求得的解不唯一,在一个周期内,至少有两组解满足方程。我们要根据一些具体的限制条件,找出最优解。
确定最优解的策略:
1)解满足原方程组。
2)解可通过周期性变化后符合机床角度运动范围的上下限。
3)角度变化绝对值小(可设置主动轴变化值和从动轴变化值的权值)。
3 仿真实验
下面通过vericut 仿真一个斜旋转轴机床的加工过程,来检测模型的正确性。机床模型为一个BC 混合型机床,且刀具轴的旋转矢量为即一个斜摆头混合型机床。
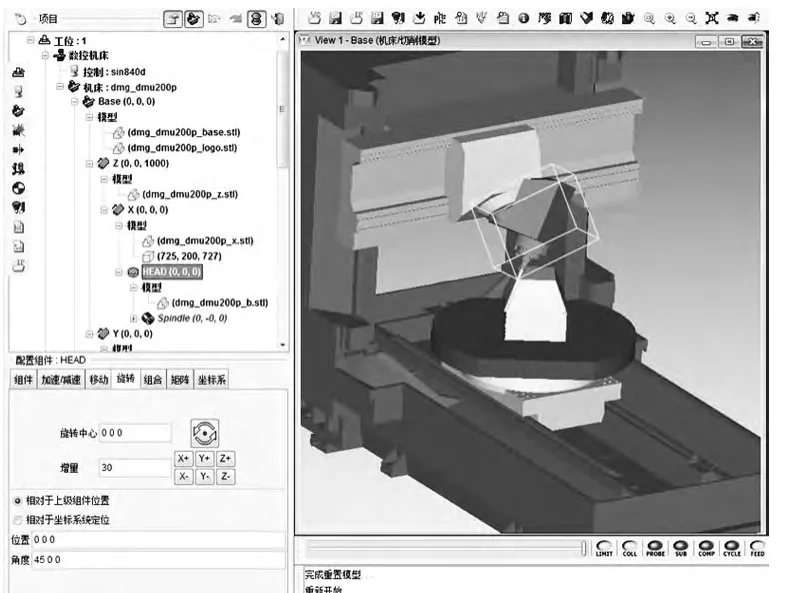
图4 斜摆头混合型五轴机床
加工毛坯为500 ×500 ×500 的一个正方体,预期将这一正方体加工成一个侧面为梯形的类棱柱体,其上表面为300 ×300 的正方形,加工后工件示意图如图5 所示,图中绿色矩形为刀尖点路径。为了达到加工的目的,用C 语言写程序造型,编制刀具路径,之后通过上述所建立的五轴机床旋转运动学通用模型,求解获得刀位文件,再把刀位文件导入vericut 中进行加工,加工结果如图6 所示。经过测量,符合预期结果。
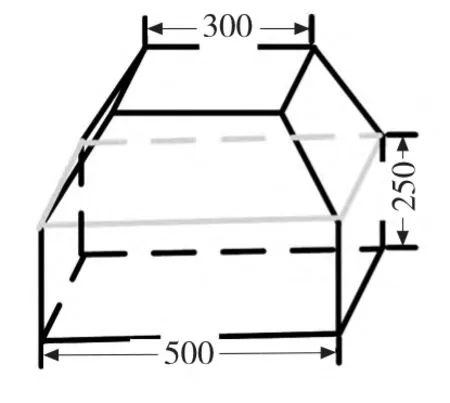
图5 加工后零件示意图
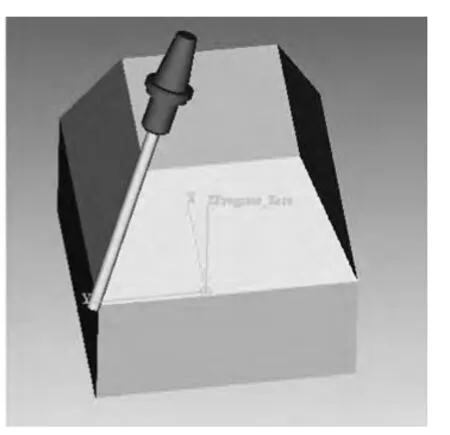
图6 加工后零件侧视图
在主频为2.2GHz 的电脑上,分别以上述BC 斜摆头混合型五轴机床(图4)、CA 双摆头机床、AB 双转台机床、AB 混合型机床为原型,用旋转运动学通用模型求解刀轴时,所耗时间的统计结果如表1 所示。除BC斜摆头混合型五轴机床外,其余机床的刀具矢量均为[0;0;1]。表1 中数据单位为ms。
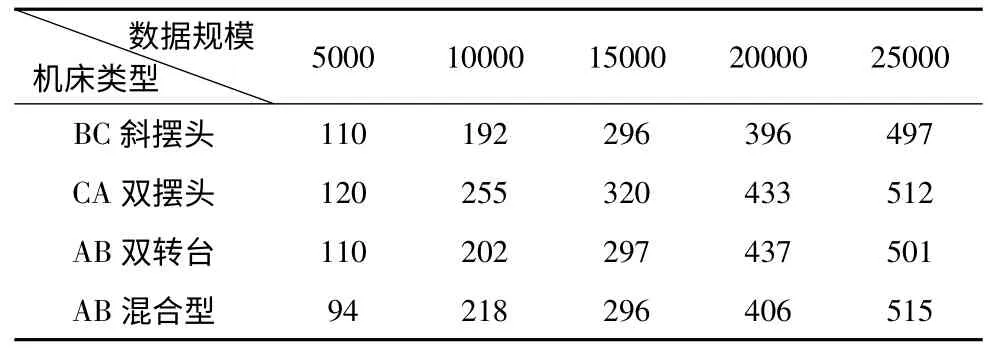
表1求解模型耗时统计表
分析上述表格可知,在不计数据的读入和写出时间情况下,用旋转运动学通用模型求解刀轴,平均每条数据处理时间约为0.02ms,可以满足实时运动控制系统的需求(一般情况下,机床系统周期为2ms,运动控制最多占1/4 的时间,即0.5ms)。
4 结束语
本文通过对三类五轴数控机床进行运动学建模,从而推导出五轴数控机床旋转运动统一的运动学模型。在此基础上,对模型进行分析,给出求解方法,并在方程多解的情况下,进一步给出确定最优解的策略。最后,通过仿真实验验证了模型的可行性和高效性。
[1]张传生,张安清.五轴数控机床中的坐标变换[J].河南广播电视大学学报,2004,17(3):47 -49.
[2]Zheng Kui-jing,Shang Bo. Circular Interpolation Algorithms of 5-Axis Simultaneous CNC System[J]. JOURNAL OF WUHAN UNIVERSITY OF TECHNOLOGY,2006,28(z2):407 -411.
[3]李永桥,陈强,谌永祥. 五轴数控机床通用坐标运动变换及求解方法的研究[J]. 组合机床与自动化加工技术,2010(10):4 -7.
[4]靳阳,郇极,肖文磊,等. 适合多种机床结构的数控系统5坐标变换库[J]. 北京航空航天大学学报,2012,38(6):842 -844.
[5]郑飂默,林浒,盖荣丽. 基于通用运动模型的五轴机床后置处理[J].计算机集成制造系统,2010,16(5):1006 -1011.
[6]张纪可,范建新,屠尉立,等. 双转台五轴数控机床定轴运动学研究[J].柴油机,2012,34(2):41 -56.
[7]吴元生. 对增广矩阵同时使用行、列初等变换解线性方程组[J].数学通报,1992(10):20 -21.
猜你喜欢
经纬天地(2022年3期)2022-07-20
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年12期)2020-01-06
制造技术与机床(2019年9期)2019-09-10
重型机械(2019年3期)2019-08-27
制造技术与机床(2017年2期)2017-05-04
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
