定长冲跑控制阀稳压过程仿真研究
2014-07-31 20:18王辉,袭安
舰船科学技术 2014年3期
王 辉,袭 安
(中国民航大学 航空工程学院,天津 300300)
定长冲跑控制阀稳压过程仿真研究
王 辉,袭 安
(中国民航大学 航空工程学院,天津 300300)
基于Fluent软件对液压阻拦系统的核心部件——定长冲跑控制阀进行仿真研究。建立基于动网格的内部流道的三维模型,利用Fluent软件对阀芯运动的内部流道三维模型进行数值模拟。采用弹簧光顺和局部网格重构方法结合Profile运动边界驱动机制实现网格区域运动,计算稳压阶段的进口压强,为定长冲跑控制阀设计提供依据。
定长冲跑控制阀;Fluent;动网格
0 引 言
定长冲跑控制阀是液压阻拦系统的核心部件,在飞机阻拦降落过程中通过定长冲跑控制阀的调压作用,使舰载机在冲跑过程中获得稳定阻拦力。在舰载机于预定位置拦停的同时,稳定的阻拦力保证飞机与飞行员不受过大的负载,避免飞机结构的损坏,确保飞行员安全。
当前,对于航母阻拦装置的研究主要集中在阻拦过程中的舰载机运动学和阻拦索动力学方面[1-2],在定长冲跑控制阀凸轮控制线的研究中,利用Mk7-1型阻拦机的凸轮控制线同比放大求解出Mk7-3型的凸轮控制线[2,5-6]。本文利用Fluent软件对定长冲跑控制阀内部流场进行仿真研究。假设舰载机在定长冲跑控制阀产生稳定压强差的阶段处于匀减速运动,计算出活塞速度和阀芯运动速度,通过Fluent软件数值仿真得到进口压强,通过观察压强是否平稳,来判断阻拦力的稳定情况,对定长冲跑控制阀的研究有重要的指导意义。
1 定长冲跑控制阀

图1 定长冲跑控制阀Fig.1 Constant runout control valve
舰载机的阻拦过程按以下方式完成:当着舰钩挂上任意1根拦阻索后,舰载机向前的冲跑带动阻拦索向前运动,拦阻索产生的拉力传递给滑轮索,滑轮索进一步带动主液压缸活塞及动滑轮组向安装在阻拦机另一端的定滑轮组方向运动。同时活塞的运动会迫使主液压缸的油液经过定长冲跑控制阀流入到储能器中,油液经过定长冲跑控制阀的流量是按照预先设定的值流入储能瓶中的,这样可以使整个阻拦过程平稳而安全,最后舰载机被安全地拦停在期望的位置。
定冲跑控制阀由阀体、阀体支柱和重量选择器组成。阀体主要由阀套、阀芯和阀座组成。通过阀芯与阀座之间的节流面积有效地控制油液的压力差,产生飞机降落所需的阻拦力,达到稳定压力的作用。调压的实质就是一个向下作动的节流阀。
阀体支柱由凸轮和上、下摇块及柱塞组成的摇臂机构2部分组成。其中凸轮安装在水平方向的凸轮轴上,工作时,在链轮的带动下,凸轮绕着凸轮轴做旋转运动,通过凸轮旋转时凸轮线型的变化就可以控制阀口的关闭规律。
重量选择器是为应对不同降落重量的舰载机所设计的。设置重量选择器的值,通过摇块调节锥阀的初始开口度以及阀芯的运动速度;预开口大小的调节,使得阻拦力大小适应飞机重量的变化;而臂长比的改变,保证重量设置不同时阀口的关闭时机相同[3]。
文中定长冲跑控制阀的几何参数参照Mk7-3型阻拦装置,Mk7-3型阻拦装置定长冲跑控制阀参数[4]见表1。
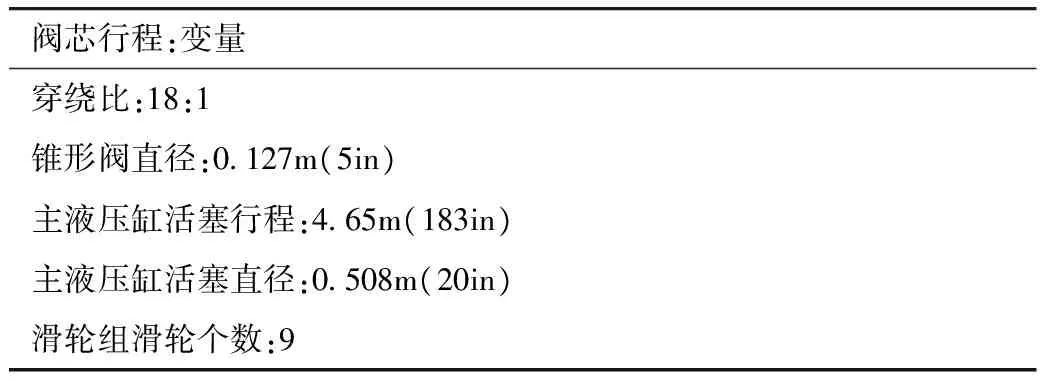
表1 Mk7-3型阻拦装置参数
2 活塞运动速度
假设舰载机着舰后,着舰钩正好挂住甲板上阻拦索的中点位置,则t时刻位置关系如图2所示。图中,Lt为t时刻舰载机的位移,L0为零时刻阻拦索甲板上长度的一半,L为t时刻甲板上阻拦索的长度。
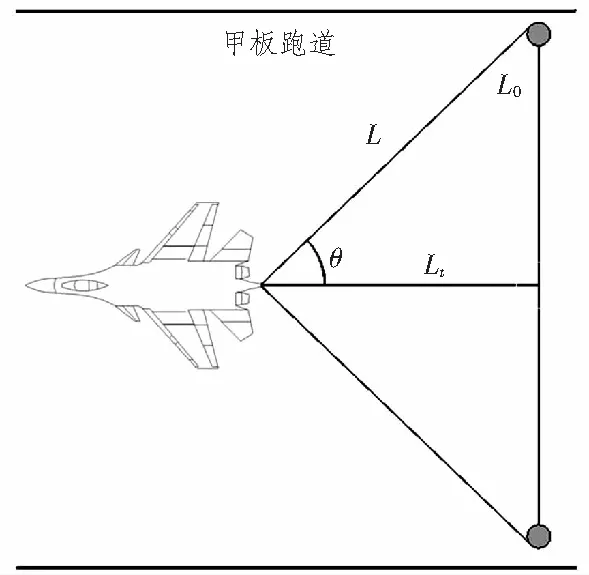
图2 t时刻舰载机位置示意图Fig.2 Schematically carrier aircraft position at time t
舰载机着舰后t时刻,阻拦索和飞机位移满足如下关系:

(1)
t时刻,滑轮索被拉出的长度:

(2)
此时,主液压缸内活塞的位移是:

(3)
式中:n为动滑轮组的动滑轮个数。
t时刻舰载机速度与阻拦索被拉出的速度关系为:

(4)
活塞速度与阻拦索被拉出的速度关系为:

(5)
3 锥阀调压原理
定长冲跑控制阀的控制作用实质上是一个节流阀。进口油液流速在主液压缸活塞的推动下,随时间不断变化。阀芯随时间增加向下移动,逐渐缩小节流面积。调节进口油液流速与阀芯运动的速度,将在锥阀的进口与出口两端得到稳定的压强差。如图3所示,d为阀座直径,α为锥阀顶角的半角,x为锥阀运动t时的有效位移量。

图3 锥阀节流示意图Fig.3 The schematic of poppet valve
节流面积为:

(6)
节流阀的流量为:

(7)
式中:Cd为节流阀流量,系数如图4所示;ρ为液压油密度;Δp为主液压缸油液与储能瓶中油液的压强差。

图4 活塞行程与节流阀流量系数的关系[5]Fig.4 The relationship between the piston stroke and the discharge coefficient
由液体流动的连续性原理可得:
Q0=u0×A0=A1×u1=A2×u2,
(8)
式中:u0为节流处油液的平均速度;u1为阀座中油液的平均速度;u2为主液压缸中油液的平均速度;A1为阀座截面积;A2为活塞的等效面积。
结合式(7)和式(8)可得到

(9)
综上所述,由式(6)和式(9)可得到在Δp下,锥阀随u2变化的位置x,即阀芯的开口度。
4 仿真与计算
4.1 模型建立
根据Mk7-3型液压阻拦系统中定长冲跑控制阀的参数,用CATIA建立锥阀内部流道三维几何模型,阀座直径d=90mm,锥阀顶角的半角α=45°,锥阀直径D=127mm。

图5 锥阀内部流场模型Fig.5 The internal flow field model of poppet valve
图6 锥阀内部流场模型几何参数Fig.6 The geometric parameters of of poppet valve the internal flow field model
4.2 网格划分
锥阀内部流道的网格模型通过Ansys13.0 中的ICEMCFD软件进行划分,进口、出口外和部边界部分压力梯度变化小,网格较粗,内部边界部分处于节流面积处,压力梯度变化较大,网格细化。采用非结构网格,以适应节流处较复杂的几何形状。

图7 网格模型Fig.7 The mesh model of the internal flow field
4.3Fluent流场仿真
4.3.1 模型假设及参数计算
在定长冲跑控制阀产生稳定压力差的阶段,舰载机所受阻拦力不变,作匀减速直线运动。参照文献[6],取0.6~1.5s为压力差稳定阶段,在固定压差下计算进口流速和阀芯运动速度。
1) 进口速度
由式(5)得到0.6~1.5s内活塞运动速度,由式(8)得到进口的流速如表2所示。

表2 进口流速
2) 阀芯运动速度
由式(6)和式(8)及u2,得到在Δp=50MPa下,节流处开口度x的值。阀芯开口度x随时间变化,从15.00 mm沿z轴负方向运动到8.19 mm。对时间求导后得到0.6~1.5 s内阀芯运动的速度如表3所示。

表3 阀芯运动速度
4.3.2 Fluent参数设置
利用Ansys Fluent 13.0软件对锥阀内部流道模型进行瞬态仿真,运动区域网格更新方法采用弹簧光顺和区域网格重构相结合的方法,边界运动由Profile文件驱动,完成阀芯运动的设置。
计算采用基于压力的瞬态求解,采用标准κ-ε模型,动量项采用一阶迎风格式离散,压力项采用标准格式离散,湍动能、湍流耗散率采用一阶迎风格式,压力速度耦合方程采用Simple算法求解。
Fluent边界条件设置:速度入口的速度随时间变化,通过Profile文件驱动;压力出口的压力值为4MPa;动网格设置中将阀芯网格部分设置为刚体;时间为步长0.01s,进行100步计算;时间总长为1.0s,每隔0.05s记录1次数据。
5 计算结果
图9~图12为4个时间点进口的静压云图。从图中可看出,各时间点进口静压变化不大。进口中心处静压较壁面处静压相对较高,但增幅很小。

图8 0.6 s进口静压Fig.8 Inlet static pressure at 0.6 s

图9 0.8 s进口静压Fig.9 Inlet static pressure at 0.8 s

图10 1.0 s时进口静压Fig.10 Inlet static pressure at 1.0 s

图11 1.2 s时进口静压Fig.11 Inlet static pressure at 1.2 s

图12 静压与时间关系Fig.12 The relationship between inlet static pressure and time
通过计算数据得到0.6~1.5s内共20个时间点的进口静压平均值,绘制静压与时间的关系如图13所示,在0.6~1.5s内,进口处静压值的平均值保持平稳,这说明在锥阀的节流作用下,定长冲跑控制阀进口压强与出口压强的差值保持稳定,使作用在主液压缸活塞上的阻拦力保持平稳,达到稳压的目的,为舰载机着舰拦停提供平稳的阻拦力。
6 结 语
本文用Fluent软件中的动网格设置,对定长冲跑控制阀的稳定压力阶段做瞬态仿真。在假设稳压阶段飞机作匀减速的前提下,没有对现有凸轮控制线作等比放大的方法,而是从进口流速和阀芯运动速度入手,计算进口的压强。通过Fluent软件的瞬态仿真得到进口压强数据,各时间点压强变化不大,说明产生的阻拦力保持不变,达到平稳拦停的目的。
[1] 张明晖,袁理,洪冠新.航空母舰液压阻拦系统阻拦力建模与仿真[J].北京航空航天大学学报,2010,36(1):100-103.
ZHANGMing-hui,YUANLi,HONGGuan-xin.Aircraftcarrierhydraulicarrestinggeararrestingforcemodelingsimulation[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2010,36(1):100-103.
[2] 朱齐丹,李新飞,吕开东.基于定常冲跑控制的阻拦过程动力学分析[J].北京理工大学学报,2012,32(3):281-285.
ZHUQi-dan,LIXin-fei,LVKai-dong.Analysisonarrestinggeardynamicwithconstantrunoutcontrol[J].TransactionsofBeijingInstituteofTechnology,2012,32(3):281-285.
[3] 杨茂胜,毕玉泉,黄葵,等.MK7-3型阻拦装置定长冲跑控制阀结构特点及控制规律[J].舰船科学技术,2012,34(3):140-143.
YANGMao-sheng,BIYu-quan,HUANGKui,etal.AnalysisonstructurecharacterandcontrolruleoftheconstantrunoutvalveforMK7-3arrestinggear[J].ShipScienceandTechnology,2012,34(3):140-143.
[4]LOUISEMF.Astudyoftheeffectofdifferentcamdesignsonmark7mod1arrestinggearperformance.AD-A061486,1978(8).
[5] 朱齐丹,闻子侠,张智.阻拦系统动力学建模与仿真[J].航空学报,2012,33(3):520-529.
ZHUQi-dan,WENZi-xia,ZHANGZhi.Shipboardarrestingkineticsystemmodelingandsimulation[J].ActaAeronauicaEtAstronauticaSinica,2012,33(3):520-529.
[6] 李新飞.舰载机起降关键技术仿真研究[D].哈尔滨:哈尔滨工程大学,2012:95-97.
LIXin-fei.Simulationofkeytechnologyoflaunchandlandforcarier-basedaircraft[D].Harbin:HarbinEngineeringUniversity,2012:95-97.
Research on pressure stabilization process of constant runout control valve
WANG Hui,XI An
(College of Aeronautical Engineering Civil Aviation University of China,Tianjin 300300,China)
Considering the constant runout control valve(CROV) is the heart of the hydraulic arresting gear system,a three-dimensional model of flow field calculation which is proposed based on dynamic mesh.Numerical simulation of flow field in a spool motion is carried out by Fluent software. A spring-based smoothing method and local remeshing method combined with Profile driven mechanism is applied in mesh zone movement. The pressure of the inlet is calculated. The result can give theoretical support for the design of CROV.
constant runout control valve;Fluent;dynamic mesh
2013-07-22;
2013-08-16
王辉(1966-),男,教授,研究方向为飞行仿真技术和流体传动及控制。
U674.771
A
1672-7649(2014)03-0094-05
10.3404/j.issn.1672-7649.2014.03.020
猜你喜欢
机床与液压(2022年21期)2022-11-23
建材发展导向(2022年20期)2022-11-03
建材发展导向(2021年15期)2021-11-05
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年9期)2021-07-16
探索科学(学术版)(2020年10期)2021-01-29
化工设计通讯(2021年9期)2021-01-08
应用能源技术(2020年9期)2020-12-14
航空发动机(2020年4期)2020-09-16
汽车维修与保养(2020年11期)2020-06-09