多描述符和多尺度城镇建筑分类
2014-08-03 02:39徐偲周坚华
遥感信息 2014年2期
徐偲,周坚华
(1.华东师范大学地理系,上海 200241;2.华东师范大学地理信息科学教育部重点实验室,上海 200241)
1 引 言
城镇用地布局和结构的现势和变迁数据,对于监测城镇扩展速率和模式,分析城镇的可持续发展能力等具有重要意义。人工实地调查是一种耗时巨大的方法,并且不能提供同步的空间连续分布数据。遥感技术可以较好解决上述问题,并可能产生基于遥感图像分析的土地利用自动识别分类技术。然而,城镇用地布局和结构的高异质性,建筑阴影和建筑投影偏斜的多变性,使得许多在城镇以外地区具有良好表现的相关技术在城镇地区无效[1]。因此,开发适用于城镇用地高异质性的分类技术一直是遥感图像分析领域的热点之一。
该研究领域目前只产生了一些比较概要的分类模型。如 C.Small等人提出的SVD模型(Sustained-Vegetation-Dark model)[2],SVD 模 型将城镇覆被分为植被覆盖区、阴影区和其他下垫面3类端元(Endmembers),李昕提出的植被-水体-其他城市地表的城镇景观分类模型[3]等。在这些确定的端元或景观类中继续划分,特别是对于SVD模型中其他下垫面和李昕模型中其他城市地表的继续划分,对于推进这些模型的实用化具有重要意义。本文着重研究这种继续划分的方法。限于篇幅和当前软硬件条件,主要研究城镇建筑分类,并侧重于划分小型居住建筑与其他建筑。
城镇建筑表面普遍存在“同物异谱”和“同谱异物”的问题。如果仅仅依靠光谱特征,很难对城镇建筑分类[4-5]。为此,基于多特征空间信息的方法被引入。多特征空间主要包括波谱、纹理、形状、拓扑结构等[4,6-8]。针对城镇建筑类别在建筑尺度、层高、表面光滑度等方面的差异,本文提出了一些实用的遥感图像特征描述符,比如:以图斑相对面积和细节密度表达建筑尺度差异、以灰度起伏表面积表达建筑层高差异、以灰度标准偏差等表达建筑表面平滑度差异,以提高城镇建筑的分类能力和精度。
建筑物由于自身的面积不同,对应的细节尺寸也有区别。本文使用不同尺寸的结构元素提取建筑物细节,这种基于多尺度思想的方法对小型居住建筑和其他建筑的划分有效。另外,通过分类获得的成员通常比较破碎,可以通过数学形态学方法将它们整理为较完整的图斑/对象。比如通过闭合操作连接两个间距小于阈值T的成员等。此时结构元素的尺寸与T有关。对于建筑类成员的整理,不同的建筑类型通常要求结构元素的尺寸不同。结构元素尺寸与成员整理的关系也适合用多分割原理来讨论。多分割克服了传统单一尺度分割无法充分提取信息的缺陷[9-10]。
本文的实验表明,多描述符空间和多尺度细节提取对于划分小型居住建筑与其他建筑有效;基于多尺度分割思想的分类结果整理对于将离散成员整理为类别对象有效。本文的算法对于高分辨城市遥感图像具有普适性,对划分上述建筑类型误判率较低。
2 研究区和研究数据
实验区包括我国广东省东莞市(113°31′E,22°39′N)、江苏省常州市(119°98′E,31°80′N)、泰国曼谷(100°48′E,13°7′N)等几个城市。实验图像包括15m分辨率的SPOT和6m分辨率的Quikbird彩色合成图像等。
3 方 法
在本文的实验期里,划分对象为城镇建筑中的小型居住建筑与其他建筑。这里的“其他建筑”特指除密集小型居住建筑之外的不透水表面。
主要算法包括多描述符[11]空间设计和分类方法设计,以及基于多尺度分割的信息提取和成员整理。选用的描述符包括波谱、纹理和形状等类别。波谱特征在城镇建筑分类中主要用于区分建筑与其他用地类别。本文采用的波谱描述符主要包括归一化植被指数(NDVI)[12]和灰度均值。实验表明,城镇建筑分类主要依靠纹理描述符,本文用到的这类描述符包括:细节密度[11]、窗口方差、灰度起伏表面积等;形状描述符主要使用了图斑面积、长宽比和形状系数[11],它主要用于去除道路等背景干扰。
本文使用了并行和串行两种方法进行分类。前者通过多描述符特征空间的并行分类,直接获得所有分类成员。后者通过分层分类和分析分层成员的继承关系获得最终分类成员。比如,在首层划分水体、植被覆盖(或农田)、不透水表面等成员,然后在次层继续划分小型居住建筑和其他建筑,并通过两层成员的继承关系分析获得最终分类成员。
图1显示基本算法流程。下面分别讨论波谱、纹理和形状描述符的特点和多描述符空间分类的方法。
3.1 波谱描述符
波谱特征主要用于划分不透水表面、植被覆盖(或农田)、水体等首层成员。本文使用的波谱描述符包括归一化植被指数NDVI(式1)或归一化绿度指数NDGI(式2)和灰度均值GR。有研究表明,NDVI能够有效分割自然覆被与人造表面[12-13]。

其中,IR和R分别为近红外和红波段的反射值。
NDVI利用了在彩红外图像上植被的IR波段值通常大大高于其他地物的特点,因此对于区分植被与其他覆盖有效。当使用天然彩色图像时,可以参照NDVI的原理计算归一化绿度指数NDGI(Normalized Difference Green Index)。

其中,G和B分别为绿和蓝波段的反射值。

图1 主要算法流程图
NDGI利用了在天然彩色图像上植被的G波段值通常高于其他地物的特点,因此对于区分植被与其他覆盖也有效。
另外,城镇建筑通常采用门类有限的材质,直接通过单像素灰度来区分建筑类型,通常不能获得满意的结果。但建筑阴影尺度和密度的差异等有可能引起某些波谱特征窗口统计值的差异。如图2所示,密集小型居住建筑存在较多的小面积阴影;而工厂等建筑,阴影完整且面积较大。当以特定尺寸窗口统计灰度均值时,有可能划分这两类建筑。图2显示提取其他建筑的例子。它使用7×7窗口获取灰度均值GR,并以条件GR>0.58提取其他建筑(黄色勾绘的图斑)。式3显示提取规则。

其中,S1为其他建筑像素集;I表示全图像。
3.2 纹理描述符
纹理特征几乎不受图像的类型和获取环境条件变化的影响,其重要性在许多方面胜过波谱特征。单个像素一定尺度邻域(窗口)内的某些统计特征可以用来表征该像素的纹理特征。如窗口最大最小值之差、标准偏差、离差和熵等[14]。
小型居住建筑与其他建筑通常存在块面大小和起伏的差异,而在遥感图像上,可以通过一定尺寸窗口大小的VI和GR组合划分建筑类型。GR约束可以有效减少背景干扰,提高分类准确性。该例提示,多描述符组合比仅用单描述符有更好的分类精度;窗口标准偏差和灰度均值对划分小型居住建筑与其他建筑有效。
另外,密集小型居住建筑群中的较亮斑块(或阴影)通常小而零碎,相比工厂等其他建筑则大而完整。所以有可能通过亮细节(或暗细节)密度来区分它们。可以利用灰度形态学滤波提取亮(暗)细节。它通过一定尺寸的结构元素(SE)对灰度图像先做开启(闭合),消除比SE尺寸小的亮(暗)细节,获得背景估计b,然后从原图像I中减去b,即可获得亮(暗)细节集D(式(4))。

其中,°表示开启操作;对于暗细节提取,相应换为闭合操作。D表示细节像素集。
细节的常用统计值是细节密度,Dd,可用式(5)表示[11]。

其中,Dd是细节密度;Sd是区域亮(暗)细节数,A为区域面积。区域可以是由前驱分割提取的图斑,也可以是窗口。
图3显示一个亮细节密度分割的实例,SE为一个3×3菱形结构元素。
灰度起伏表面积SA能反映地物的高低起伏,它是在缺少3-D数据(比如Lidar)的情况下,地表起伏的一个近似替代量。该描述符主要用于分割高于地面的建筑物与地面覆层(如农田、水体等)。SA是一个窗口值,它以窗口中所有像素与邻域像素的灰度差累和表征窗口灰度起伏(式(6))。


图3 以细节密度分割建筑类型的实例
其中,m和n为窗口的宽和高;下标i和j表示列号和行号;Δx和Δy分别表示当前像素与水平右邻和下方紧邻像素的灰度差。SA对于高于地面的建筑物与地面通常具有确定的分割阈值,可以通过简单分割区分二者。图4显示以SA滤除农田和水体的实例。
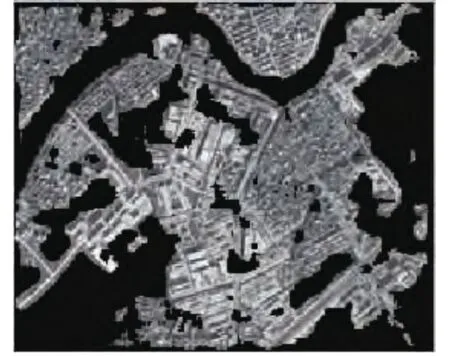
图4 灰度起伏表面积SA的分割实例
3.3 形状描述符
本文使用的形状描述符包括图斑面积、长宽比和形状系数[5]。不同建筑块面的尺寸通常存在差别,如住宅通常比厂房等建筑的开间/跨度小得多,有可能通过图斑面积区分它们。使用面积等形状描述符的前提是尽可能去除建筑图斑之间的粘连。通过形态学开启等操作,可以部分去除这种粘连。图5显示以开启去除图斑粘连后,根据图斑尺寸做建筑类型分割的例子(原图像与图2的底图相同)。式(7)、式(8)显示图5中两种建筑像素集的提取规则。

其中,其中S1和S2分别为小型居住建筑和其他建筑像素集。RA为图斑面积系数,RA<0.7表示小于最大图斑面积的70%;SA为图斑表面积系数,SA>0.3表示小于表面起伏最大面积的30%。
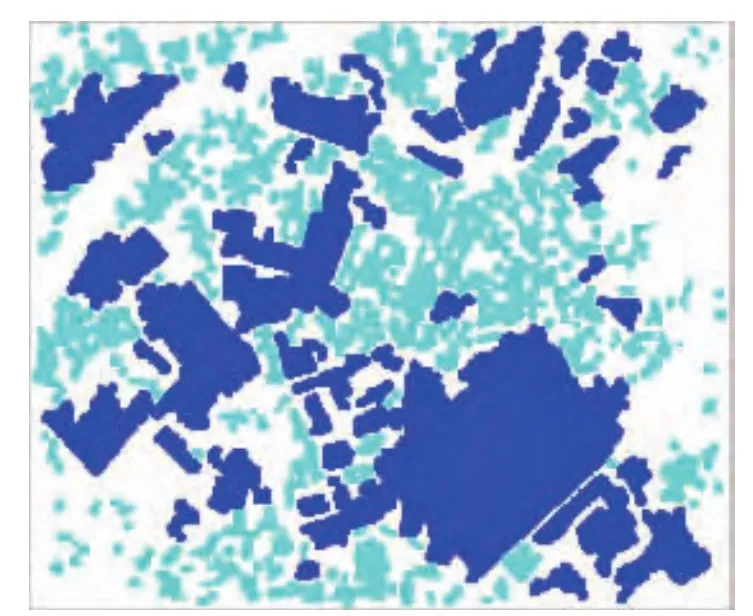
图5 纹理和形状表描述符结合分割的实例
建筑图斑分离的主要难点是分离建筑与道路。道路与平顶建筑波谱与纹理特征都可能相似,所以在前驱分割/分类结果中多见二者粘连的情况。本文尝试以形状描述符分离二者,具体步骤如下:①通过长宽比和面积分割移除未与建筑粘连的道路。②通过形态学处理和形状分析移除与建筑粘连的道路。此时,先做形态学开启去除粘连,再比较开启前后形状系数变化明显的图斑,通过求差集剔除道路。图6(a)和图6(b)分别显示初始和移除了道路的建筑图斑建筑。图6(b)剔除道路的条件为:RlW(长宽比)>2.5和RA<0.2。

图6 RlW和RA结合去除道路的实例
3.4 多尺度分析
本文进行了多尺度信息提取和分类结果多尺度整理两个方面的实验。
3.4.1 图像细节的多尺度提取
以亮/暗细节划分建筑类型的实验中引入了多尺度分割思想。

图7 以不同尺寸SE获取暗细节划分建筑类型的实例
图7是以不同尺寸SE获取暗细节进行建筑分类的实例。当SE尺寸足够小,有可能仅提取小型居住建筑的亮/暗细节。如果最小的SE还嫌大,可以放大图像。对于使用不同尺寸SE获得的细节二值图,SE尺寸较大者会包含SE较小者的细节,可以通过击中等运算,将大小两种细节分开。不同尺寸的细节密度通常在建筑分类中有良好表现。实验结果提示,不同尺寸的细节密度对划分上述两类建筑有效。
3.4.2 成员到图斑的多尺度整理
整理分类成员时,可以根据成员的破碎程度和尺寸选择不同尺寸的SE进行形态学整理。比如较小尺寸的SE时有利于提取小型居住建筑的轮廓线通过调整SE的尺寸,有可能使成员廓线接近期望的分类边界(参见图9(c),图9(f))。
3.5 多描述符空间分类
多描述符空间分类包括如下主要步骤:①确定分类数和特征空间的描述符组合;②计算全图像在特征空间各描述符的值和构建输入向量;③采样并构建训练集和测试集;④训练学习机给出针对当前分类任务的决策规则树;⑤以决策规则树实施分类;⑥以测试集评估分类精度。
4 结果与分析
下面将采用不同城市的若干图像对本文的主要算法做如下讨论:①说明典型用法;②评估分类精度;③分析普适性。
4.1 不同特征空间的分类精度比较
图8的实例比较了在多描述符空间和常规波谱特征空间,做城镇建筑分类的精度差异。实验图像为广东东莞市15m分辨率的SPOT天然彩色合成图像。多描述符空间由GR-Dd-VI-A-SA5 个分量构成;波谱特征空间由R-G-B 3个分量构成。由图8可见,与常规波谱特征空间相比,多描述符空间获得分类成员更完整,更接近于目视判读结果。

图8 分类空间比较的实例(东莞,SPOT)
表1和表2是由测试集数据评估这两种分类的结果给出的混淆矩阵。由表中数据比较可知,多描述符空间分类的全局精度提高了7.92%。其中小型居住建筑和其他建筑的分类精度分别提高了18.6%和11.1%,但植被覆盖/农田以及水体的分类精度并没有改善。该例提示,采用多描述符空间分类,仅仅对于那些存在同谱异物和同物异谱现象的地物分类具有优势,分类精度比传统波谱特征空间分类显著提高。

表1 多描述符空间建筑分类混淆矩阵

表2 光谱特征空间建筑分类混淆矩阵
4.2 并行与串行分类的精度比较
图9显示两个串行分类的实例。参考首层分出的不透水表面,能够提高次层建筑分类的精度,使分类成员更接近于目视解译结果。表3对这两个例子的分类精度做比较。与并行分类相比,采用串行分类对小型居住建筑和其他建筑分类的精度比并行分类平均提高了6.40%和3.18%。
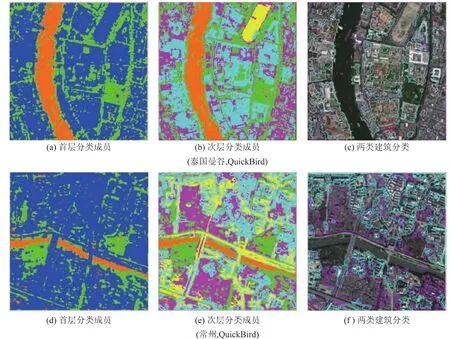
图9 以串行方法分类建筑的实例

表3 图9串行分类实例的精度统计
5 结束语
本文设计了一种多描述符和多尺度的城镇建筑分类算法。该算法组合使用了光谱、纹理和形状特征,通过相应特征的描述符设计,在多描述符空间进行了串、并行分类的综合实验,并在纹理特征提取和分类结果整理中引入了多尺度分割的思想。
实验结果表明,本文的算法对提取城镇不透水表面、进而提取城镇建筑、以及区分小型居住建筑与其他建筑有效,用户精度平均优于90%。对于含噪的复杂图像,串行分类优于并行分类。
[1]BUYANTUYEV A,WU J.Urbanization alters spatiotemporal patterns of ecosystem primary production:A case study of the Phoenix metropolitan region,USA[J].Journal of Arid Environments,2009,73(4-5):512-520.
[2]SMALL C.Estimation of urban vegetation abundance by spectral mixture analysis[J].International Journal of Remote Sensing,2001,22(7):1305-1334.
[3]李昕.基于分形理论的遥感图像分类方法研究[D].湖南大学,2009.
[4]刘峰,龚健雅.一种基于多特征的高光谱遥感图像分类方法[J].地理与地理信息科学,2009,25(3):19-22.
[5]杜凤兰,田庆久,夏学齐.遥感图像分类方法评析与展望[J].遥感技术与应用,2004,19(6):521-525.
[6]潘琛,林怡,陈映鹰.基于多特征的遥感影像决策树分类[J].光电子·激光,2010,21(5):731-736.
[7]PRITI M,NAMITA S.Retrieval of remote sensing images using colour and texture attribute[J].Inter-national Journal of Computer Science and Information Security,2009.4(1).
[8]MALIK J,BELONGIE S,LEUNG T,et al.Contour and texture analysis for image segmentation[J].International Journal of Computer Vision,2001,43(1):7-27.
[9]谭衢霖,刘正军,沈尾.一种面向对象的遥感影像多尺度分割方法[J].北京交通大学学报:自然科学版,2007,31(4):312-315.
[10]BAATZ M,SCHAPE A.Object-oriented and multi-scale image analysis in semantic networks[C].2nd International Symposium:Operationalization of Remote sensing,August,1999:16-20.
[11]周坚华,周一凡,穆望舒.城镇绿地树种识别的数学描述符[J].遥感学报,2011,15(3):524-538.
[12]PRICE J C.Estimating vegetation amount from visible and near infrared reflectances[J].Remote Sensing of Environment,1992,41(1):29-34.
[13]GAMON J A,FIELD C B,GOULDEN M L,et al.Relationships between NDVI,canopy structure,and photosynthesis in three Californian vegetation types[J].Ecological Applications,1995,5(1):28-41.
[14]周坚华.遥感图像分析与空间数据挖掘[M].上海科技教育出版社,2010:140-158.
猜你喜欢
北京测绘(2022年9期)2022-10-11
测绘学报(2022年12期)2022-02-13
绿色科技(2021年5期)2021-11-28
波谱学杂志(2021年3期)2021-09-07
计算机应用与软件(2020年6期)2020-06-16
计算机技术与发展(2020年4期)2020-04-30
电子制作(2019年2期)2019-02-14
浙江工业大学学报(2017年5期)2018-01-22
自动化学报(2016年4期)2016-11-08
印制电路信息(2015年6期)2015-12-30