自励异步发电机异步电动机串联型混合电动汽车系统*
2014-08-09 07:57盛洋波卢子广胡立坤廖一旭
电机与控制应用 2014年7期
盛洋波, 卢子广, 胡立坤, 廖一旭
(广西大学 电气工程学院,广西 南宁 530004)
0 引 言
考虑能源利用率以及目前技术可实行条件,发展混合电动汽车(Hybrid Electric Vehicle, HEV)是发展新能源汽车的必经之路[1]。HEV可有效提高燃油的利用率,减少对环境的污染,符合我国目前所倡导的生态文明建设的国策。HEV的发电机和驱动电机一般采用笼型异步电机和永磁同步电机。随着汽车产业链的大规模发展,其电机容量达到数十千瓦,甚至高达上百千瓦,采用永磁同步电机严重受限于稀土资源的缺乏[2],且稀土的伴生矿含有放射性元素,存在生态安全隐患。此外,永磁同步电机弱磁升速困难,在高温、震动或过负荷条件下易出现退磁现象,且高速运行故障时会产生过高绕组电压损坏变流器。因此,一些知名的HEV厂商,如雷诺、通用、奔驰、宝马等更倾向于采用笼型异步电机[3]。异步电机价格便宜、坚固耐用、结构简单,可显著提高HEV系统对恶劣环境的适应能力,是目前全球HEV电机的主流产品。
在HEV零部件技术中,发电机和电动机的控制系统最为关键。异步发电机通常需要在机端并接电容组成独立自励异步发电机[4](Self-Excited Induction Generator, SEIG)才能在HEV上独立供电,但SEIG不能有效维持其端电压,带载能力差。为保证供电质量,在SEIG机端并联PWM变流器,同时采用不依赖电机数学模型的SEIG端电压定向控制方法,可显著提高SEIG端电压的动静态性能,有效解决各种电能质量问题[5,6]。异步电动机(Induction Motor, IM)调速控制通常采用矢量控制和直接转矩控制。直接转矩控制在HEV低速运行时转矩脉动较大,不能满足低速运行时的稳定高转矩要求,且直接转矩控制无电流内环,存在过流危险[7];矢量控制采用双闭环控制结构,将磁通和转矩解耦,可实现转矩的快速控制,满足HEV的高性能调速要求[8]。
本文针对采用异步电机的串联型HEV,给出HEV发电机工作模式下的系统结构,分别对SEIG侧变流器的矢量控制方法和IM侧变流器的矢量控制方法进行了分析设计,最后进行调速试验,给出了实时控制效果。
1 异步电机的数学模型
异步电机有电动和发电两种可逆运行状态,本文选取电动运行状态搭建数学模型,则在旋转dq坐标系下的磁链方程为
(1)
式中:ψsd、ψsq——定子磁链的d、q轴分量;
ψrd、ψrq——转子磁链的d、q轴分量;
isd、isq——定子电流的d、q轴分量;
ird、irq——转子电流的d、q轴分量;
Lm——互感;
Ls——定子自感;
Lr——转子自感。
dq坐标系下的电压方程为
(2)
式中:usd、usq——定子电压的d、q轴分量;
urd、urq——转子电压的d、q轴分量;
Rs、Rr——定子、转子的电阻;
ωdqs、ωdqr——定子、转子在dq坐标系的角速度;
p——微分算子。
电磁转矩方程为
(3)
式中:np——极对数。
2 HEV系统及控制结构
2.1 HEV系统结构
串联型HEV发电机工作模式下的系统结构如图1所示。它由供电系统和驱动系统组成。供电系统由发动机、SEIG和SEIG侧变流器组成。驱动系统由IM和IM侧变流器组成,两台变流器背靠背连接。
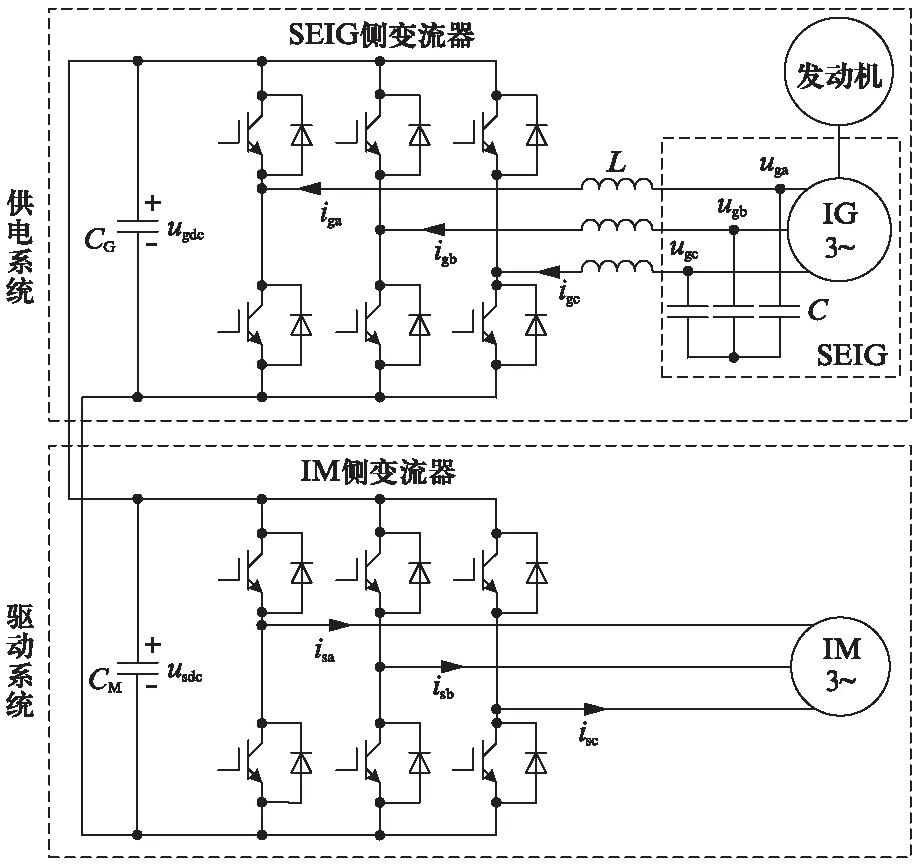
图1 串联型HEV发电机工作模式下的系统结构
图1中,供电系统变量和参数:uga、ugb、ugc为三相SEIG端电压,iga、igb、igc为SEIG侧变流器三相电流,ugdc为直流侧电压,C为励磁电容,L为滤波电感,CG为直流侧电容;驱动系统变量和参数:isa、isb、isc为异步电动机三相定子电流,CM为直流侧电感,usdc为直流侧电压,其中,usdc=ugdc=udc。
SEIG侧变流器的主要功能: 在HEV不同运行状态下稳定持续地为HEV驱动系统供电,同时维持SEIG端电压恒定。IM侧变流器的主要功能: 驱动IM工作,实现HEV不同运行状态下的高性能调速控制。
2.2 SEIG变流器控制结构
SEIG侧变流器的控制框图如图2所示。采用基于SEIG端电压定向的矢量控制方法,选取d轴方向为SEIG端电压矢量旋转方向,则变流器电流的d轴分量igd为有功分量,q轴分量igq为无功分量。
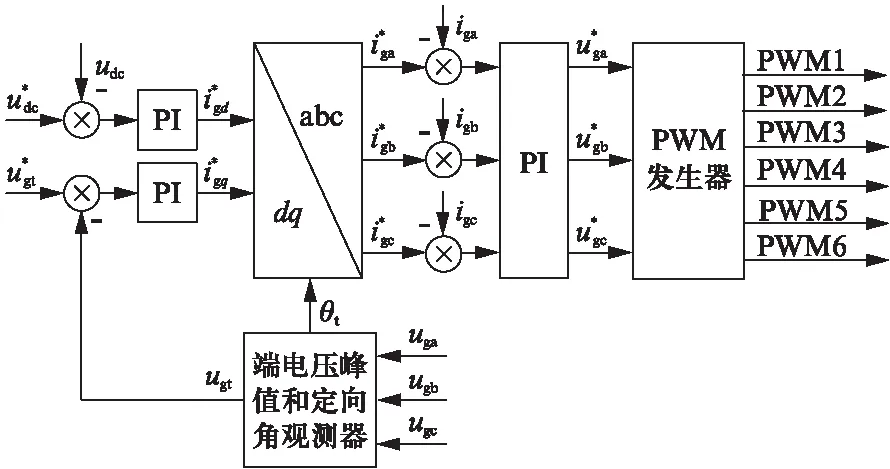
图2 SEIG侧变流器控制框图
在图2中,端电压峰值和定向角观测器模型如式(4)所示。
(4)
式中:ugα、ugβ——三相SEIG端电压经过Clarke变换后的两相静止坐标系α、β下的分量。

(5)


kgdp、kgdi、kgqp、kgqi——直流侧电压PI调节器和SEIG端电压峰值PI调节器的比例、积分系数。
(6)
式中,kgap、kgai、kgap、kgai、kgap、kgai为SEIG侧变流器三相电流PI调节器的比例、积分系数。
三相调制波经过SPWM调制后输出6路PWM脉冲,然后驱动SEIG侧变流器持续稳定地为处于不同运行状态下的HEV驱动系统供电。
2.3 IM侧变流器控制结构
IM侧变流器采用基于转子磁链定向的矢量控制方法,取d轴方向为转子磁链ψr方向,则由等式可得转子磁链方程为
(7)
由于d、q坐标系定向于转子磁链方向,则ωdqs等于转子磁链角速度ω1,ωdqr等于转差角速度ωs,而笼型异步电动机转子内部是短路的,转子电压在d、q轴上的分量urd=urq=0,则等式可简化为
(8)
由等式(7)和式(8)可得转子磁链ψr与定子电流励磁分量isd的关系为
(9)
式中:Tr——转子电磁时间常数。
由式(9)可知,转子磁链ψr仅由定子电流励磁分量isd决定,与转矩分量isq无关,说明isd和isq是解耦的。
将式(3)的转矩方程化为
(10)
由式(10)可知,若控制励磁分量isd保证转子磁链ψr不变,即可实现转矩分量isq对电磁转矩Te的快速控制,从而将IM等效为直流电动机。IM侧变流器的控制框图如图3所示。
图3中,转子磁链和定向角观测器采用的电流模型为
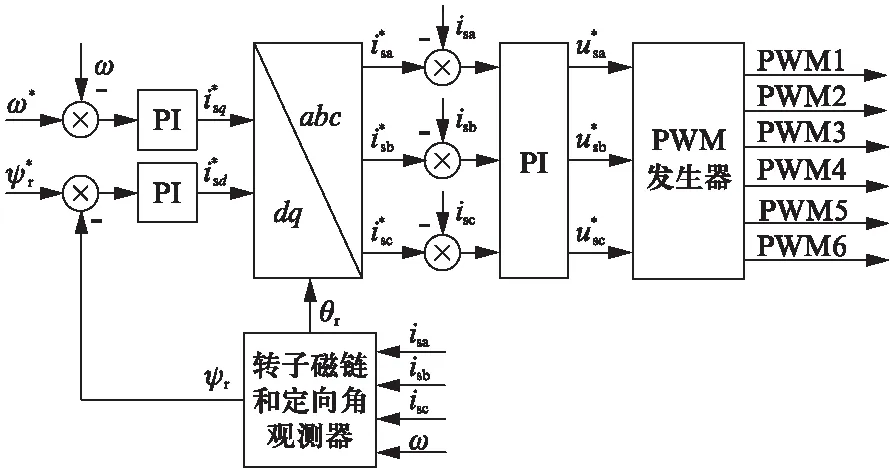
图3 IM侧变流器控制框图
(11)
式中:ω——转速反馈值;
ψrα、ψr β——转子磁链的α、β分量;
isα、isβ——定子电流的α、β分量。
磁链ψr和定向角θr为
(12)

3 试验结果
采用PM300DSA120智能功率模块搭建SEIG侧PWM变流器和IM侧PWM变流器,分别采用TMS320F2812 DSP和dSPACE 单板控制器DS1104进行实时控制。通过1024线增量式编码器测量IM转速,采用LEM LA100-P电流传感器和LEM LV28-P电压传感器测量SEIG侧变流器的三相电流、IM三相定子电流、SEIG端电压,及直流侧电压。SEIG侧变流器参数: 滤波电感 1.7mH,直流侧电容5000μF,开关频率7kHz,死区时间4.3μs;IM侧变流器参数: 直流侧电容5000μF,开关频率10kHz,死区时间5μs。SEIG和IM的参数如表1所示。

表1 SEIG和IM参数
由图4(a)可看出,转速响应时间为 0.15s,响应时间短;由图4(b)、图4(c)、图4(d)可看出,转速变化时,电流跟踪性能良好,转矩Te呈现方波,且转子磁链没有变化,解耦效果明显。
由图4(e)可知,SEIG端电压峰值由311V跌落至270V,后又恢复给定值311V,最大动态电压41V,SEIG侧变流器可有效维持机端电压;由图4(f)可知,直流侧电压由200V跌落至170V,后又恢复给定值200V,最大动态电压30V。这表明HEV需要加速动能时,驱动系统能够提供稳定的电源,保证了整个HEV正常运行。
HEV减速试验结果(IM转速给定值ω*由600r/min降低到200r/min)如图5所示。由图5(a)和图5(b)可看出,速度和定子电流的跟踪性能良好;由图5(c)和图5(d)可看出,转矩和定子磁链解耦效果明显,与加速试验结果一致。
由图5(e)、图5(f)可知,SEIG端电压峰值由311V上升至326V,最大动态电压为15V,直流侧电压由200V上升至207V,最大动态电压为7V,表明HEV减速时能将能量反馈至直流侧。若在直流侧接入低压侧带蓄电池的双向DC/DC变换器,可吸收减速时回馈的动能,提高HEV运行效率。

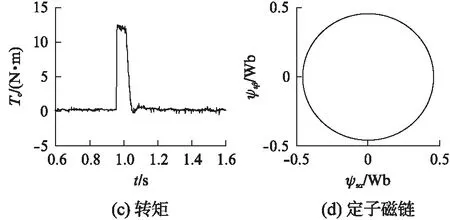

图4 HEV加速试验结果
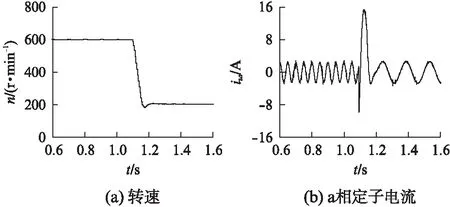
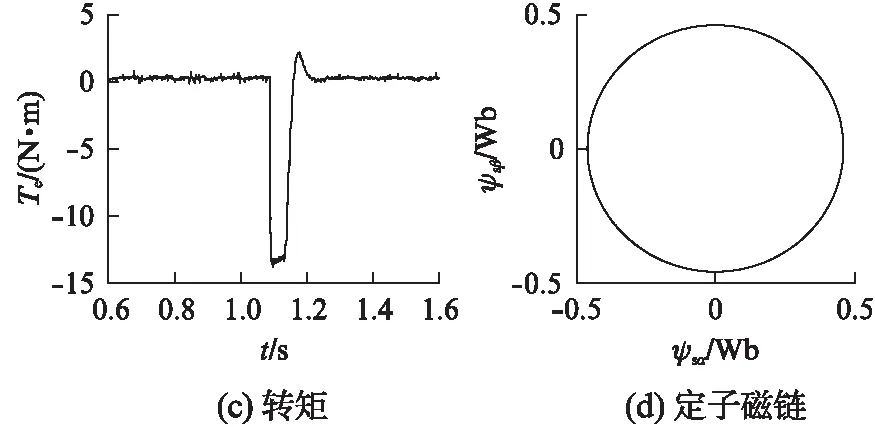
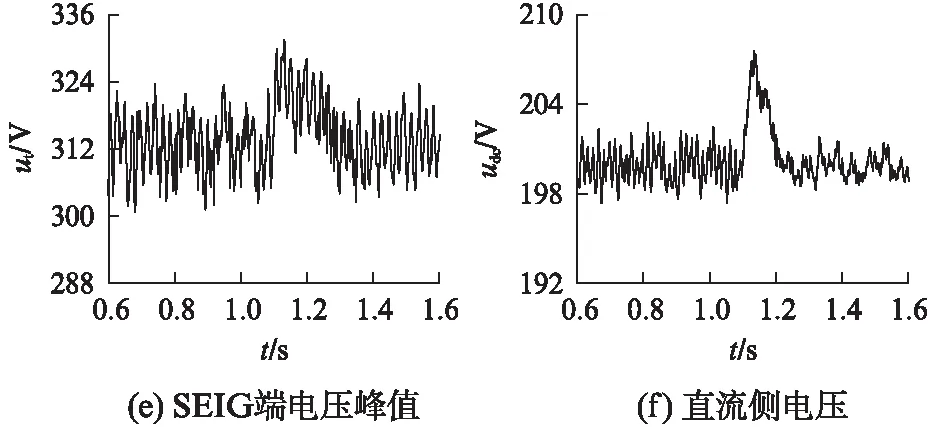
图5 HEV减速试验结果
4 结 语
本文设计了一种发电电机和驱动电机均采用异步电机的串联型HEV动力系统。该HEV系统由SEIG、双PWM变流器和IM组成,两个PWM变流器均采用矢量控制方法。试验结果表明: HEV加速和减速时,IM的速度响应时间短,电磁转矩和转子磁链能够实现解耦,调速控制效果好;同时,在HEV加速时,SEIG变流器能够稳定持续提供加速所需要的动能;HEV减速时,IM变流器能够将减速产生的动能回馈到直流侧。该系统的良好运行效果为HEV的动力系统提供了新的选择方案。
【参考文献】
[1] CHAN C C. The state of the art of electric, hybrid, and fuel cell vehicles[J]. Proceedings of the IEEE, 2007,95(4): 704-718.
[2] WERBOS P J. Computational intelligence for the smart grid-history, challenges and opportunities[J]. IEEE Computational Intelligence Magazine, 2011,6(3): 14-21.
[3] ZERAOULIA M, BENBOUZID M E H, DIALLO D. Electric motor drive selection issues for HEV propulsion systems: a comparative study[J]. IEEE Transactions on Vehicular Technology, 2006,55(6): 1756-1764.
[4] BANSAL R C. Three-phase self-excited induction generators: an overview[J]. IEEE Trans. on Eneg-rgy Conversion, 2005,20(2): 292-299.
[5] CHAUHAN Y K, JAIN S K, SINGH B. A prospective on voltage regulation of self-excited induction generators for industry applications[J]. IEEE Transactions on Industry Applications, 2010,46(2): 720-730.
[6] SINGZH B, RAJAGOPAL V. Neural network based integrated electronic load controller for isolated asynchronous generators in small hydro generation[J]. IEEE Transactions on Industrial Electronics, 2011,58(9): 4264- 4274.
[7] MARKADEH G R A, DARYABEIGI E, LUCAS C, et al. Speed and flux control of induction motors using emotional intelligent controller[J]. IEEE Tran-sactions on Industry Applications, 2011,47(3): 1126-1135.
[8] 代同振,王明渝,吴喜红,等.基于矢量控制的双PWM调速系统仿真分析[J].电机与控制应用,2010,37(4): 49-53.
猜你喜欢
电源技术(2016年12期)2017-01-10
微特电机(2016年3期)2016-11-29
电测与仪表(2016年8期)2016-04-15
电测与仪表(2016年10期)2016-04-12
通信电源技术(2016年4期)2016-04-04
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电气传动(2015年11期)2015-06-10
电测与仪表(2015年16期)2015-04-12
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年19期)2014-04-04